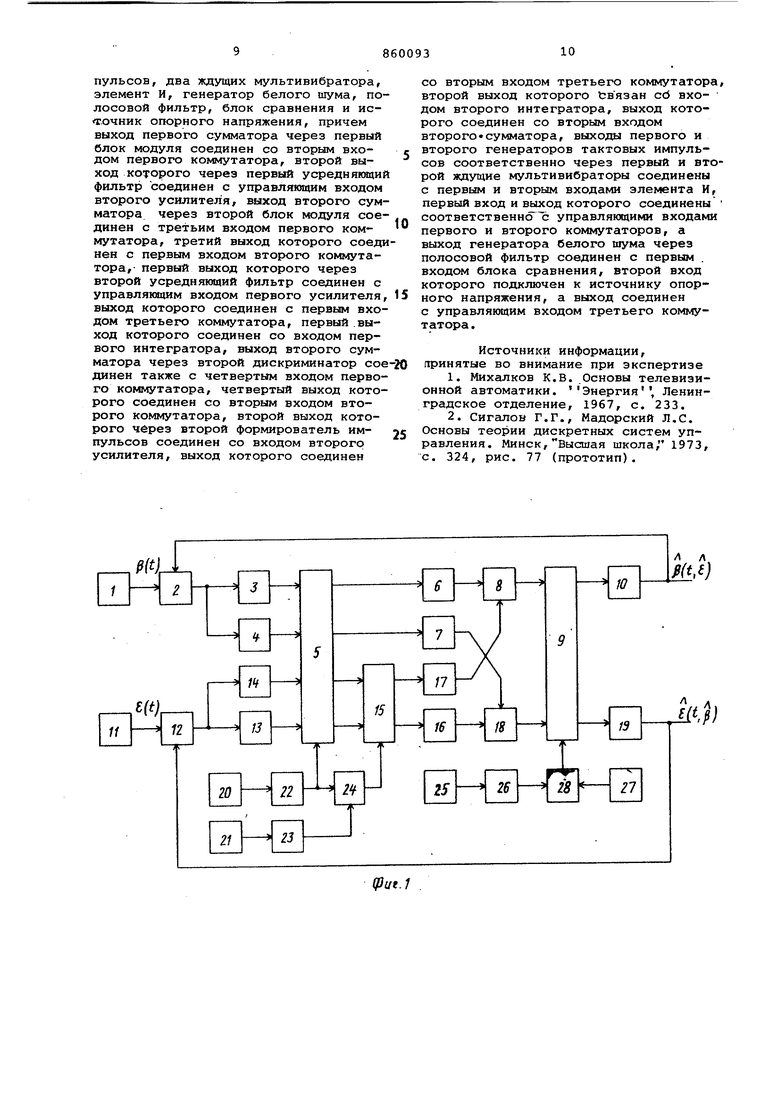
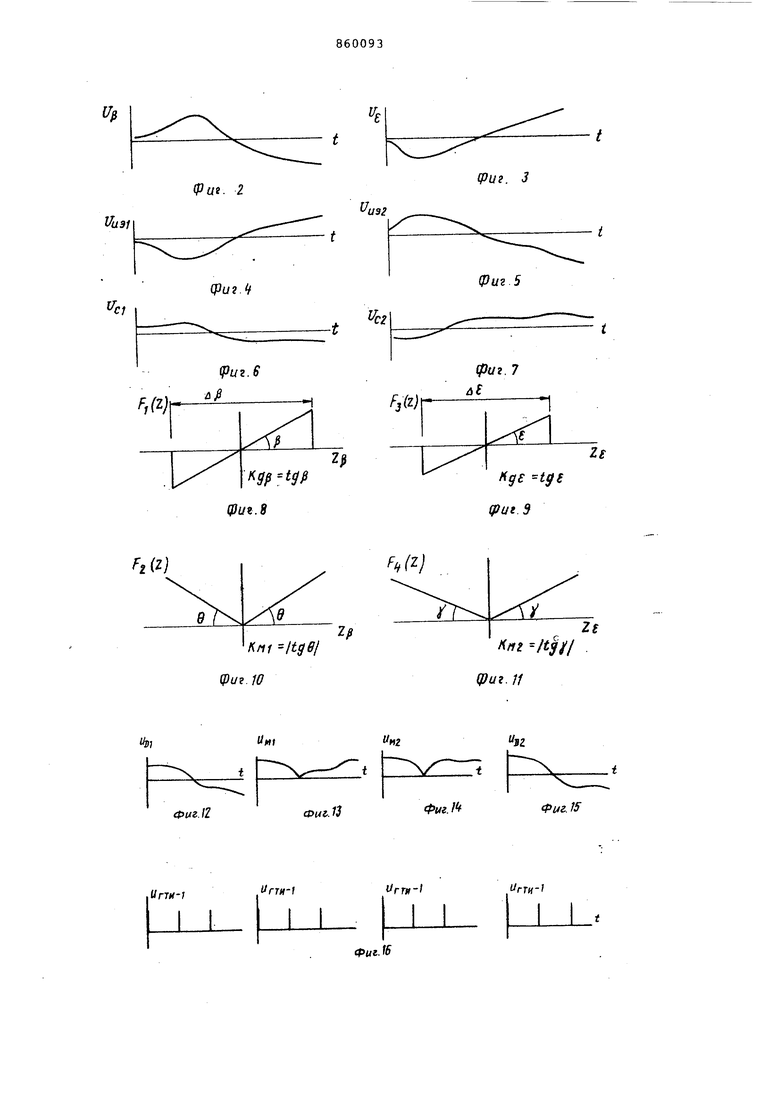
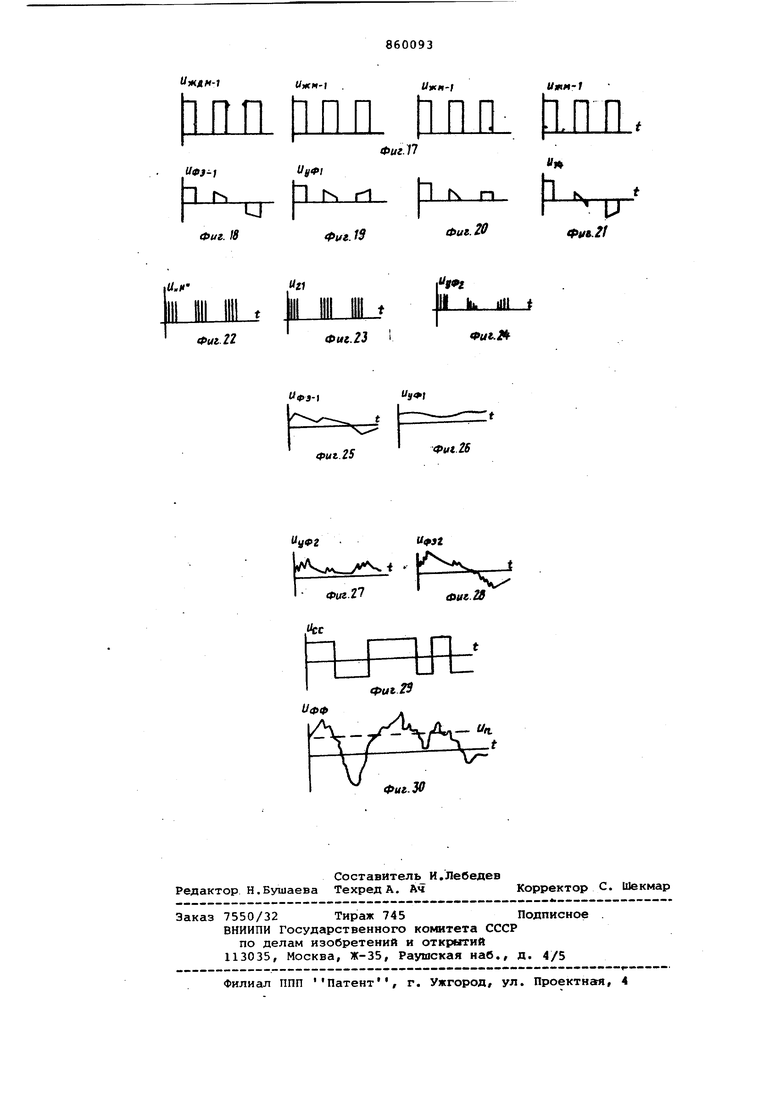
Изобре1;ение относится к вычислител ной технике и может быть использовано .для исследования помехоустойчивос ти, оценки статических и динамических характеристик автоматических сле дящих систем с телевизионными датчиками. Известны импульсные системы и уст ройства с телевизионными датчиками 1. Наиболее близка по технической сущности к предлагаемой модель с тел визионным датчиком, содержащая сумматоры, коммутатор, интеграторы 2, Однако она не достоверно отражает все физические явления, происходящие в двухканальных следящих системах с телевизионными датчиками, например наличие неравнозначных нелинейных связей между каналами, переры вы информации в следящих контурах (объект лоцирования стохастически за крывается облаками), зависимость качества работы от размеров объекта по соответствующим осям координат, зави симость качества работы от размеров кадра и числа строк в кадре и т.д. Цель изобретения - повышение достоверности и точности модели устройства слежения с телевизионным датчиком. Поставленная цель достигается тем, что в устройство для моделирования автоматических следящих систем с телевизионным датчиком, содержащее первый задатчик координат, выход которого соединен с первым входом первого сумматора, выход которого через первый дискриминатор, соединен с первым входом первого коммутатора, первый выход которого через первый формирователь импульсов соединен со входом первого усилителя, первый интегратор, выход которого является первым выходом устройства и соединен со вторым входом первого сумматора, второй задатчик координат, выход которого соединен с первым входом второго сумматора, второй усилитель и второй интегратор, выход которого является вторым выходом устройства, дополнительно введены два блока модуля, второй дискриминатор, второй и третий коммутатор, второй формирователь импульсов, два усредняющих фильтра, два генератора тактовых импульсов, два ждущих мультивибратора, элемент И, генератор белого 1цума, полосовоР фильтр, блок сравнения и источник опорного напряжения, причем выход пер вого сумматора через первый блок модуля соединен со вторым входом первого коммутатора, второй выход которого через первый усредняющий фильтр соединен с управляющим входом второго усилителя, выход второfo сумматора через второй блок модуля соединен с третьим входом первого коммутатора, третий выход которого соединен с первым входом второго коммутатора, первый выход которого чере второй усредняющий фильтр соединен с управляющим входом .первого усилите ля, выход которого соединён с первым входом-третьего коммутатора, первый выход которого соединен со входом первого интегратора, выход второго сумматора через второй дискриминатор соединен также с четвертым входом первого коммутатора, четвертый выход которого соединен со вторым входом второго коммутатора, второй выход которого через второй формирователь импульсов соединен со входом второго усилителя, выход которого соединен со вторым входом третьего коммутатор второй выход которого связан со входом второго интегратора, выход которого сс единен со вторым входом второ го сумматора, выходы первого и второ го генераторов тактовых импульсов со ответственно через первый и второй ждущие мультивибраторы соединены с первым и вторым -входами элемента И, первый вход и выход которого соединены соответственно с управляющими входами первого и второго коммутаторов, а выход генератора белого шума через полосовой фильтр соединен с первым входом блока сравнения, второй вход которого подключен к источнику опорного напряжения, а выход соединен с управляющим входом третьего коммутатора . На фиг. 1 изображена схема модели устройства слежения с телевизионным датчиком; на фиг. 2 - 20 - диаграммы работы. Устройство содержит первый задатчик l-B(t) координаты, первый сумматор первый дискриминатор 3, первый блок 4 модуля, первый коммутатор 5, первый формирователь 6 импульсов, первый ус редняюи Ьй фильтр 7, первый усилитель 8, третий коммутатор 9, первый инте. гратор 1.0, .второй задатчик координаты 11.- C(t) , второй сумматор 12, BTOpofe дискриминатор 13, второй блок 14 модуля, второй коммутатор 15, вто рой формирователь 16 импульсов, второй усредняющий фильтр 17, второй усилитель 18, второй интегратор 19, первый генератор 20 тактовых импульсов, второй генератор 21 тактовых им пульсов, первый ждущий мультивибрато 22, второй ждущий мультивибратор 23 элемент И 24, генератор 25 белого шу ма, полосовой фильтр 26, источник 27 опорного напряжения, блок 28 сравнения. Сумматор 2, дискриминатор 3, первые вход и выход коммутатора 5, формирователь 6, усилитель 8, первые вход и выход коммутатора 9, интегратор 10 образуют первый замкнутый контур устройства слежения с телевизионным датчиком (ТД), например азимутальный . Сумматор 12, дискриминатор 13, четвертые вход и выход коммутатора 5, формирователь 16, усилитель 18, вторые вход и выход коммутатора 9, интегратор 19 образуют второй замкнутый контур устройства слежения с ТД, например угломестный. Блок 4 модуля, вторые вход и выход коммутатора 5, усредняющий фильтр 7, соединенные последовательно, образуют первый функциональный блок связи между первым и вторым каналами (ФБС1-2). Блок модуля 14, третьи вход и выход коммутатора 5, усредняющий фильтр 17, соединенные последовательно, образуют второй функциональный блок связи между вторым и первым каналами (ФБС2-1). Генераторы 20 и 21 тактовых импульсов, ждущие мультивибраторы 22 и 23, элемент И, коммутаторы 5 и 15 образуют модель блока развертки ТД и имитатор выходных сигналов последнего; генератор 25 белого шума полосовой фильтр 26, источник 27 опорного напряжения, блок 28 сравнения и коммутатор 9 составляют имитатор помех устройства слежения с ТД. Работа модели устройства слежения с телевизионным датчиком (ТД) состоит в следующем. С задатчиков 1 и 11 координат на первые входы сумматоров 2 и 12 поступают напряжения постоянного трка fJUy.) (фиг. 2) и и у (фиг. 3), которые являются аналогом текущих координат |3 (t) и e.(t) центра тяжести изображения лоцируемого объекта на приемной поверхности ТД и, следовательно, имитируют соответственное положение объекта в пространстве. С выходов интеграторов 10 и 19 соответственно на вторые входы сумматоров 2 и 12 поступают противофазные напряжения постоянного тока-иц,() (фиг. 4) и-Оцд С-ьИ являющиеся аналогом измеренных значений координат f(-t) и (t) объекта С выхода сумматоров 2 и 12, которые соответственно выполняют операции Р,). 2 р 0, и U -Uyg2 t)--U(t)--U2(tДеХ 1е -о, :где Zft(t} p.(t) - (t), Z-{t) (t) -%(t), напряжения -и.(Ь) (фиг. 6) и (фиг. 7) поступают соответственно на входы дискриминаторов 3 и 13 и блоков 4 и 14 модуля, где соответственно преобразуются по формулам )-F,(Zp,)--U,(t,z),. Uci(,2,)i UciWF4tZp)-.U,,tt,Z)i uP ЛР .i l-- - -i-7-- c/, V. J a 1- 5 при этом « UP - дй Irt (0,HpU - V ip,x -- 2o.- -гг (фиг. 8), где &|ъ- апертура дискримин тора канала, . (о,нг (фиг. 9), где &g- апертура дискримин тора канала , F(Zp) KMl/Z|il (фиг. 10) где К„ |t96)|, F4(Z) (фиг. 11), где /tg-j-/ , причем Kg-p iKg-f , К(. К. С выходов блоков 3, 4 и 14 и 13 напряжения U, (t) (фиг. 12), UM(t), (фиг. 13), () (фиг. 14) и ) (фиг. 15) поступают на первый, второй, третий и четвертый входы коммутатора 5. Коммутатор 5 по сигналам (фиг.17) поступающим на его управляющий вход с выхода ждущего мультивибратора 22, осуществляет квантование по времени напряжений, поступающих на его входы При этом частота квантования f (t)--f/T равна частоте следования тактовых им пульсов f, .(t) (фиг. 16) , которые 1 1 И Т , поступают на вход 22 с выхода генера тора 10 и определяют частоту следова НИН кадров fn(t) . В каждый момент вр мени t f,C4).,.) С первого и четвертого выходов ко мутатора 5 снимгиотся импульсы на1фяж НИИ U.(t) (фиг. 18) и U..(t) (фиг. 21 JA причем U,.a)-U(t,p,) ;rnt-iT..rj-Ht-iT,,)l, U (0--U (t Z Мл IT 1гл . М .....r.)-Mt-.-T,,).
,c;
i - номер кадра;
R-j- угловые размеры объекта по
оси
- угловые размеры (апертура) кадра (строба) по осиР;
Ь )H(t.)l
o
поступает на вход формирователя 16.
«О
С выходов формирователей 6 и 16 снимаются напряжения (фиг. 25, фиг. 28)
(Р) ф,а)(Р)КфэиР),
65 t - время обратного хода и Т - ор время прямогохода развертывающего луча телевизйойного датчика (ТД) по оси fr рабочей поверхности последнего в 1-ом кадре. Со второго и третьего выходов коматора 5 снимаются импульсы напряий (t) (фиг. 19) и и (t) г. 20) , причем .|UcV.Ь)/|o {4-b-iV -C,)-H-t-«T j, )|| . Импульсы напряжений U.(t) , Uj(t)., t) и 4,(1), соответственно посту входы формирователя, усредщего фильтра, на первый и второй ды ко влутатора 15, на управляющий д которого поступают импульсы на- i жения (фиг. 22) с выхода элемента 4, и, циа) - f 1гП,г,)и (t- п„)я х2 )И(4.-У1-Г„ 1 , Т„д - период строчной развертки; п - номер строки в 1-том, кадре; , -г - ot - .,tj R - угловые размеры объекта по ° оси J R - угловые размеры (апертуры) кадра (строба) по оси f-j ot время обратного и Т,,с ос время прямого-хода луча ТД по оси g рабочей поверхности последнего в i-том кадре изображения. С первого выхода коммутатора 15 снится напряжение Uj((t) , а со второго ода - напряжение ), причем Ct),)2 (t-иTn tГ2)-1(.)JK,,(i, lob V-.- lot V- i - fnc l. тупает на вход усречнянадего фильт17, а напряжение u,,(.)-u,,(i,7,)|j4..r,)-u.ТТОторые поступают соответственно на входы усилителей 8 и 18. С выходов усредняющих фильтров 7 и 17 снимаются напряжения уфи() и ) . Напряжение .c ... Л) -Ь 1 . . Pt Ф- ПК т-т- ПК о (фаг.26) поступает во второй канал слежения, на управляющий вход усилителя 18, для изменения коэффициента усиления последнего и, следовательно, добротности второго канала в целом. Напряжение Ксл tB г ц Ct)--f I ,t)atr JЦ,,а;-с)ас зФ пкпсиТпс Vnco ((UL2.27) поступает в первый канал слежения, на управляющий вход усилителя 8, для изменения коэффициента усиления посл днего и, следовательно, добротности первого канала в целом. К-с и КсА - коэффициенты .преобразования ФБа1-2 (4,5,7) ИФБС2-1 (14 5,15,17). С выходов усилителей 8 и 18 напря жения а JiC,,ti,VKv,u,,a,it) и,5а,гр,г)--и,,2. поступают на первый и второй входы коммутатора 9, с первого и второго в ходов которого поступают на входы ин теграторов 10 и 19. С выхода интегратора 10 напряжени IiW-U,/t)L-4Ui(P)R,,,(P),P) по цепи обратной связи первого канала поступает на второй,вход сумматора 2, где сравнивается -с текущим зна чением Ua(t). С выхода интегратора 19 напряжениег - tUE(P) И92 Р)1; --ь- игЛР), по цепи обратной связи второго канала поступает на второй вход сумматора 12, где сравнивается с текущим значением % (t). дАя оценки влияния перерывов инт, формации (например, лоцируемый объек закрывается стохастически другим объ ектом, облаками и т.д.) на управляю щий вход коммутатора 9 поступает напряжение Vct(t} , представляющее собой случайный телеграфный сигнал фиг.2 Статистические свойства U(t) оп ределяются статистическими свойств ми напряжения (фиг. 30) , котоое формируется полосовым фильтром 1,26 из напряжения шума, поступакнцего на его вход с выхода генератора белого шума 25 и имеющего равномерный спектр в диапазоне частот си О-ЮиУд, где WQ- частота среза исследуемой системы, а также величиной напряжения Un(t), которое формируется источником 27 опорного напряжения, поступает на вход схемы сравнения и определяет длительность перерывов информации в системе с ТД. Фильтр 26 имеет переменную полосу пропускания и позволяет менять статистические свойства напряжения Ц,,фсь; и, следовательно, среднюю частоту перерывов информации. В момент превышения напряжения Ljj(t) (фиг. 30) порогового уровня коммутатор 9 отключает от входов интеграторов10 и 19 напряжения U(t) и Uyn(t) на время длительности существованияС(фиг. 30) выброса напряжения ILJt) над пороговым уровнем Un(t). Модель устройства слежения с телевизионным датчиком -может быть реализована на транзисторах и интегральных схемах. Применение в качестве основного элемента операционного усилителя в интегральном исполнении позволяет просто реализовать модель в виде отдельного блока, что сокращает время на подготовку и проведение эксперимента, упрощает эксплуатацию устройства и позволяет проводить исследования большого класса систем управления с ТД без смены аппаратуры. Формула изобретения Устройство для моделирования автоматических следящих систем с телевизионным датчиком, содержащее первый задатчик координат, выход которого соединен с первым входом первого сумматора, выход которого через первый дискриминатор соединен с первым входом первого коммутатора, первый выход которого через первый формирователь импульсов соединен со входом первого усилителя, первый интегратор, выход которого является первым выходом устройства и соединен со вторым вхо|дом первого сумматора, второй задатчик координат, выход которого соединен с первым входом второго сумматора, второй усилитель и второй интегратор, выход которого является вторым выходом устройства, о т л и ч а ющ е е с я тем, что, с целью повышения точности моделирования, в него дополнительно введены два блока модуля, второй дискриминатор, второй и третий коммутатор, второй формирователь импульсов, два усредняющих фильтра, два генератора тактовых импульсов, два ждущих мультивибратора, элемент И, генератор белого шума, по лосовой фильтр, блок сравнения и источник опорного напряжения, причем выход первого сумматора через первый блок модуля соединен со вторым входом первого коммутатора, второй выход которого через первый усреднякнций фильтр соединен с управляющим входом второго усилителя, выход второго сумматора через второй блок модуля соединен с третьим входом первого коммутатора, третий выход которого соеди нен с первым входом второго коммутатора, первый выход которого через второй усреднякмдий фильтр соединен с управляющим входом первого усилителя, выход которого соединен с первым входом третьего коммутатора, первый выход которого соединен со входом первого интегратора, выход второго сумматора через второй дискриминатор сое динен также с четвертым входом первого коммутатора, четвертый выход которого соединен со вторым входом второго коммутатора, второй выход которого через второй формирователь импульсов соединен со входом второго усилителя, выход которого соединен -- j,со вторым входом третьего коммутатора, второй выход которого Ьвязан сб входом второго интегратора, выход которого соединен со вторым входом второго«сумматора, выходы первого и второго генераторов тактовых импульсов соответственно через первый и второй ждущие мультивибраторы соединены с первым и вторым входами элемента И, первый вход и выход которого соединены соответственно :: управляющими входами первого и второго коммутаторов, а выход генератора белого шума через полосовой фильтр соединен с первым входом блока сравнения, второй вход которого подключен к источнику опорного напряжения, а выход соединен с управляющим входом третьего коммутатора . Источники информации, принятые во внимание при экспертизе 1.Михалков К.В. Основы телевизионной автоматики. Энергия, Ленинградское отделение, 1967, с. 233. 2.Сигалов Г.Г., Мадорский Л.с. Основы теории дискретных систем управления. Минск, Высшая школа, 1973, с. 324, рис. 77 (прототип).
(Pat. 2
Vu3i
fpui. 3

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для воспроизведения с носителя магнитной записи | 1988 |
|
SU1624517A1 |
| ТЕЛЕВИЗИОННЫЙ КООРДИНАТНЫЙ ДИСКРИМИНАТОР | 1996 |
|
RU2139640C1 |
| Ультразвуковой расходомер | 1979 |
|
SU853397A1 |
| Устройство подавления импульсных помех при приеме телевизионных сигналов в системах связи с частотной модуляцией | 1982 |
|
SU1075447A1 |
| ТЕЛЕВИЗИОННЫЙ ИЗМЕРИТЕЛЬ КООРДИНАТ | 1986 |
|
SU1517737A1 |
| Телевизионное устройство для поиска и слежения за двумя источниками излучения | 1981 |
|
SU985973A2 |
| Телевизионное поисково-следящее устройство | 1977 |
|
SU682880A1 |
| Передающая телевизионная камера на фоточувствительном приборе с зарядовой связью | 1985 |
|
SU1284002A1 |
| Телевизионное следящее устройство | 1989 |
|
SU1699013A1 |
| Цифровое телевизионное следящее устройство | 1990 |
|
SU1748285A1 |
(риг if
Фиг 5
tpuz.S
;fz;
(риг. 7 л1
W
It
Kge tgs (putB
hd
Kfif ltgei (риг. JO
Кнг /W (Риг. 11
fnH-l
Unn-i
t rTH-l жди-)„ Мхгм-(,, &Ш1 ОДШ I«жм-г Ь. РКП Ф«/г. W
Фиг 22 ФигЛ7 . п. Фиг. 20 . /5 Ц Ь- ч
Фиг.23
Фиг.2 ц Ш, tL Ф4/а.//
и,г
, IT
ифф
Фие.28
WrФut23
V
Фиг. 30
