О Ч)
ю о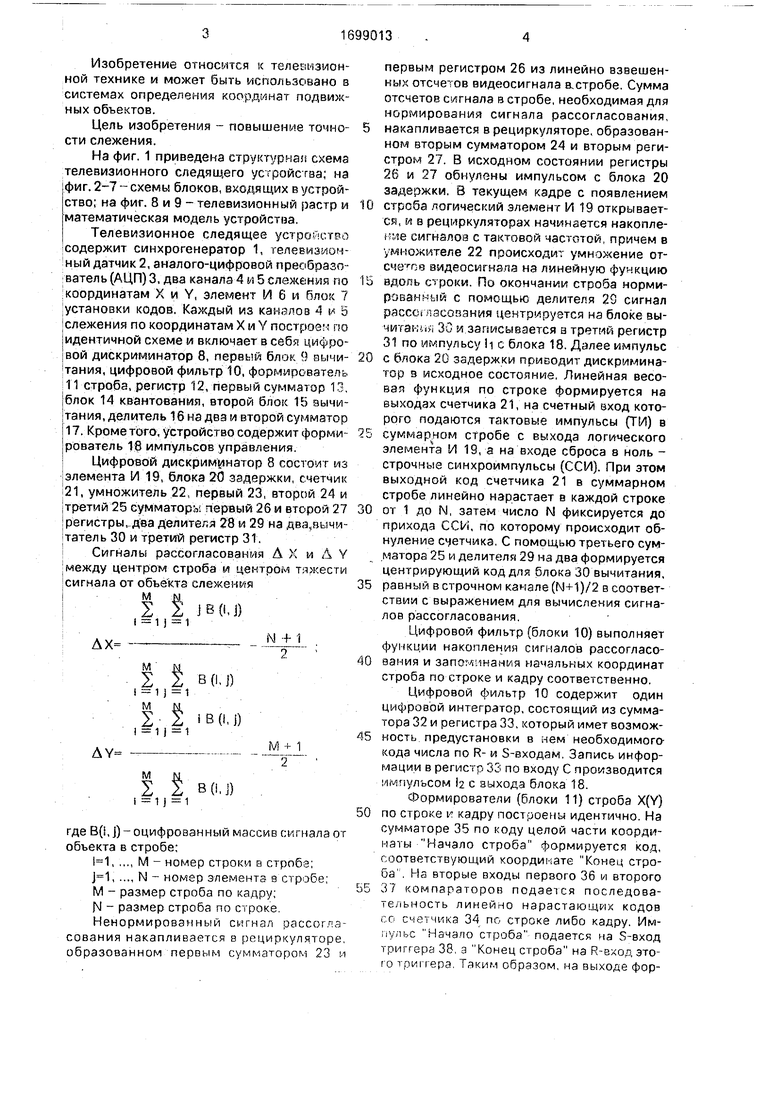

| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровое телевизионное следящее устройство | 1990 |
|
SU1748285A1 |
| Телевизионный координатор | 1983 |
|
SU1109956A1 |
| СПОСОБ СЛЕЖЕНИЯ ЗА ОБЪЕКТОМ И ЦИФРОВАЯ ТЕЛЕВИЗИОННАЯ СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2440691C1 |
| ТЕЛЕВИЗИОННОЕ СЛЕДЯЩЕЕ УСТРОЙСТВО | 1988 |
|
SU1574152A1 |
| ТЕЛЕВИЗИОННЫЙ КООРДИНАТНЫЙ ДИСКРИМИНАТОР | 1996 |
|
RU2139640C1 |
| ТЕЛЕВИЗИОННЫЙ КООРДИНАТНЫЙ ДИСКРИМИНАТОР | 1996 |
|
RU2143182C1 |
| Координатный телевизионный измеритель | 1981 |
|
SU1040624A1 |
| ТЕЛЕВИЗИОННОЕ СЛЕДЯЩЕЕ УСТРОЙСТВО | 1985 |
|
SU1286089A1 |
| ТЕЛЕВИЗИОННЫЙ ИЗМЕРИТЕЛЬ КООРДИНАТ | 1986 |
|
SU1478978A1 |
| ЦИФРОВАЯ СЛЕДЯЩАЯ СИСТЕМА | 2010 |
|
RU2444038C1 |


Изобретение относится к телевизионной технике и может быть использовано в системах определения координат подвижных объектов. Целью изобретения является повышение точности слежения. Телевизионное следящее устройство содержит синхрогенес п р 1, телевизионный датчик 2, аналого-цифровой поеобразователь (АЦП) 3, два кзнопа слежения по коордмнатом X и Y4w5 злемелг И 6, блок установки кодов 7, а каждый канал слеженкя содержит цифровой дискриминатор 8, г.ервый блок вычитания 9, цифровой фильтр 10, формирователь строба 11, регистр 12, первый сумматор 13, блок квантования 14, второй блок вычитания 15, депитель нэ два 16 и второй сумматор 17. Кроме того устройство содержит формирователь импульсоз управлений 18. Предложенный принцип построения кз- налов слежения существенно уменьшает амплитуду паразитных автоколебаний, что эквивалентно повышению точности слежения. 9 ил.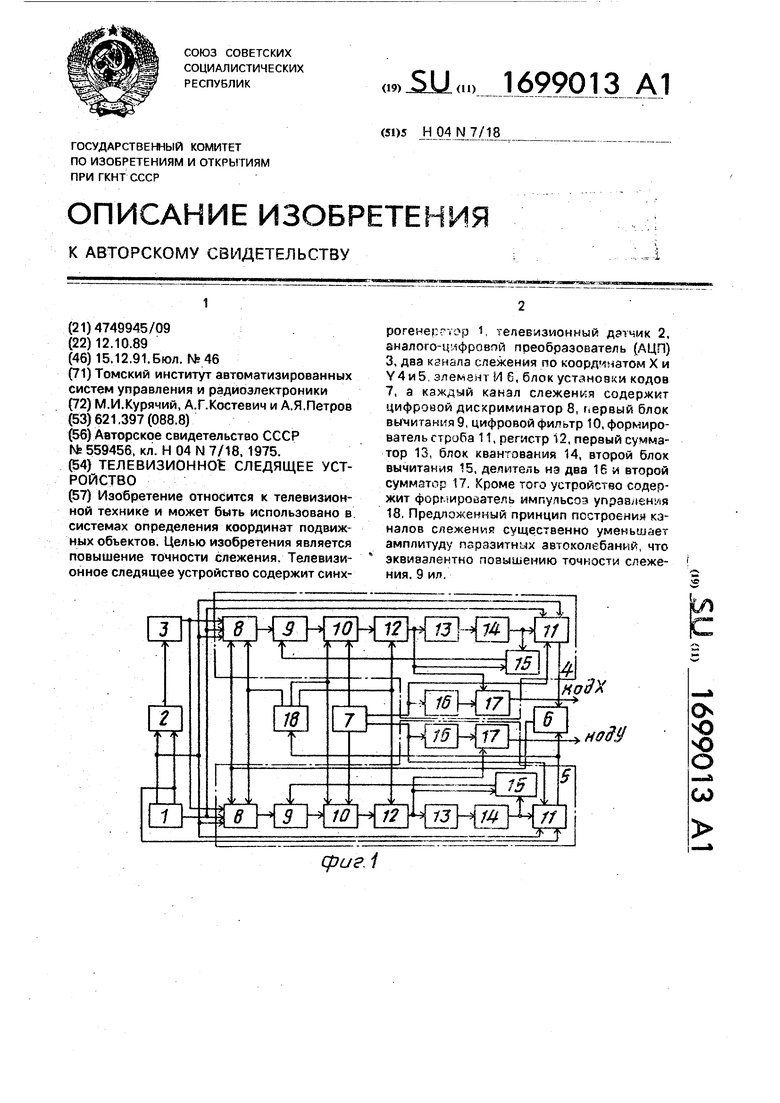
(риг. 1
Изобретение относится к телевизионной технике и может быть использовано в системах определения координат подвижных объектов.
Цель изобретения - повышение точности слежения.
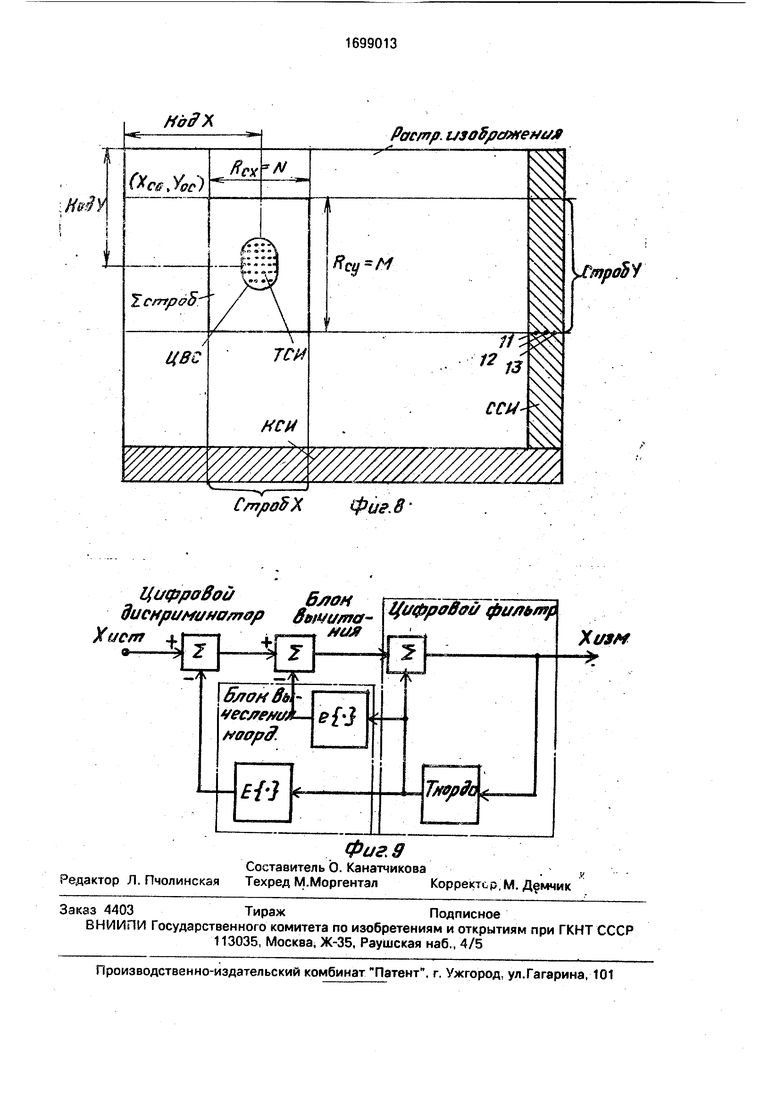
На фиг. 1 приведена структурная схема телевизионного следящего устройства; на фиг. 2-7-схемы блоков, входящих в устройство; на фиг. 8 и 9 - телевизионный растр и математическая модель устройства.
Телевизионное следящее устройство содержит синхрогенератор 1, телевизионный датчик 2, аналого-цифровой преобразователь (АЦП) 3, два канала 4 и 5 слежения по координатам X и Y, элемент И 6 и блок 7 установки кодов. Каждый из каналов 4 и 6 слежения по координатам X и Y построен по идентичной схеме и включает в себя цифровой дискриминатор 8, первый блок 9 вычитания, цифровой фильтр 10, формирователь 11 строба, регистр 12, первый сумматор 13, блок 14 квантования, второй блок 15 вычитания, делитель 16 на два и второй сумматор 17. Кроме того, устройство содержит формирователь 18 импульсов управления.
Цифровой дискриминатор 8 состоит из элемента И 19, блока 20 задержки, счетчик 21, умножитель 22, первый 23, второй 24 и -третий 25 сумматоры первый 26 и второй 27 регистры два делителя 28 и 29 на два,вычи- татель 30 и третий регистр 31.
Сигналы рассогласования АХ и A Y между центром строба и центром тяжести сигнала от объекта слежения iм N
I 2 JBd.j)
I 1 J - 1
АХ -
NjM о
2 i
-1} 1 М N
2 2
AY -
м
2
B(l.j)
где B(i, j) - оцифрованный массив сигнала от объекта в стробе;
, ,,., М - номер строки в строба;
- номер элемента в стробе;
М - размер строба по кадру;
N - размер строба по строке
Ненормированный сигнал рассогласования накапливается в рециркуляторе, образованном первым сумматором 23 и
первым регистром 26 из линейно взвешенных отсчетов видеосигнала в.стробе. Сумма отсчетов сигнала в стробе, необходимая для нормирования сигнала рассогласования. накапливается в рециркуляторе, образованном вторым сумматором 24 и вторым регистром 27. В исходном состоянии регистры 26 и 27 обнулены импульсом с блока 20 задержки. В текущем кадре с появлением 0 строба логический элемент И 19 открывается, и в рецмркуляторах начинается накопление сигналов с тактовой частотой, причем в умножителе 22 происходит умножение от- ,в видеосигнала на линейную функцию вдоль строки. По окончании строба нормированный с помощью делителя 20 сигнал рассся ласозэния центрируется на блоке вы- чигакяя 30 и записывается в третий регистр 31 по импульсу Н с блока 18. Далее импульс 0 с блока 20 задержки приводит дискриминатор з исходное состояние, Линейная весовая функция по строке формируется на выходах счетчика 21, на счетный вход которого подаются тактовые импульсы (ТИ) в 5 суммарном стробе с выхода логического элемента И 19, а на входе сброса в ноль - строчные синхроимпульсы (ССИ). При этом выходной код счетчика 21 в суммарном стробе линейно нарастает в каждой строке 0 от 1 до N, затем число N фиксируется до прихода ССИ, по которому происходит обнуление счетчика, С помощью третьего сумматора 25 и делителя 29 на два формируется центрирующий код для блока 30 вычитания, 5 равный в строчном канале (N+1J/2 в соответствии с выражением для вычисления сигналов рассогласования.
Цифровой фильтр {блоки 10) выполняет функции накопления сигналов рассогласо- 0 вания и запоминания начальных координат строба по строке и кадру соответственно.
Цифровой Фильтр 10 содержит один цифровой интегратор, состоящий из сумматора 32 и регистра 33, который имет возмож- 5 ность предустановки в нем необходимого- кода числа по R- и S-входам, Запись информации в регистр 33 по входу С производится импульсом 2 с выхода блока 18.
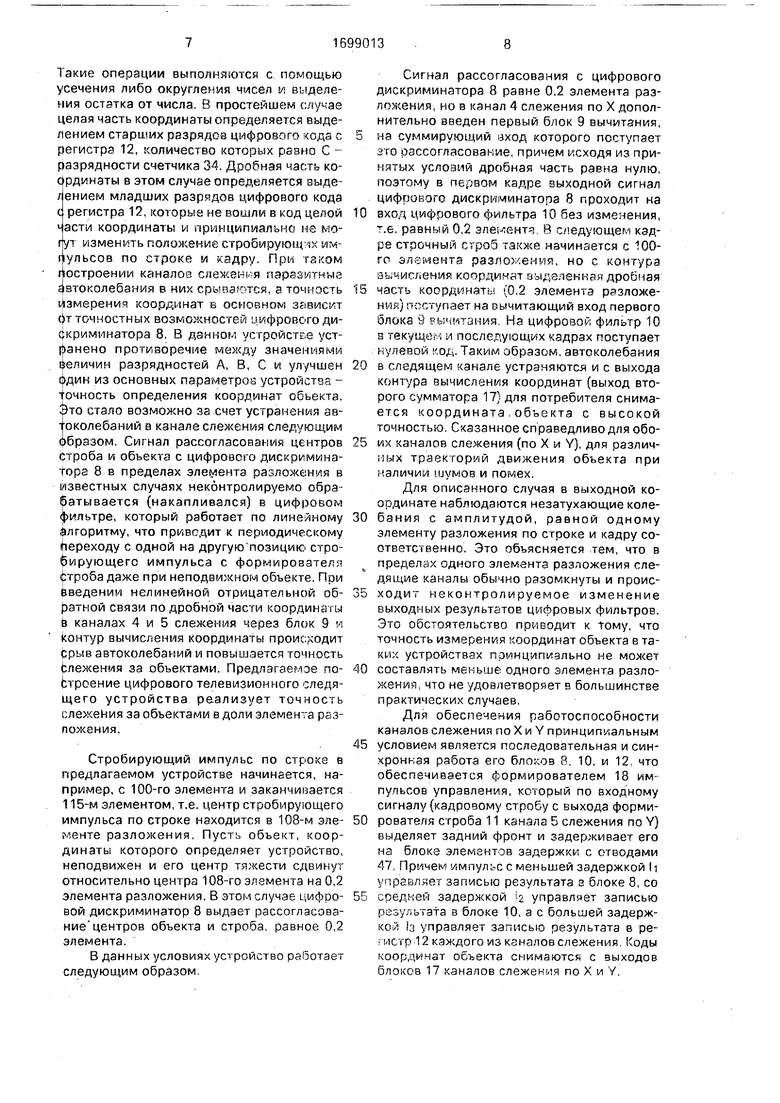
Формирователи (блоки 11) строба X(Y) 0 по строке v кадру построены идентично. На сумматоре 35 по коду целой части координаты Начало строба формируется код, соответствующий координате Конец стро- Оа . На вторые входы первого 36 и второго 5 37 компараторов подается последовательность линейно нарастающих кодов го 34 по строке либо кадру. Им- .ivibc Начапо строба подается на S-вход триггера 38 а Конец строба на R-вход это- го три гера Таким образом, на выходе формирователя строба 11 получают строчный либо кадровый стробы.
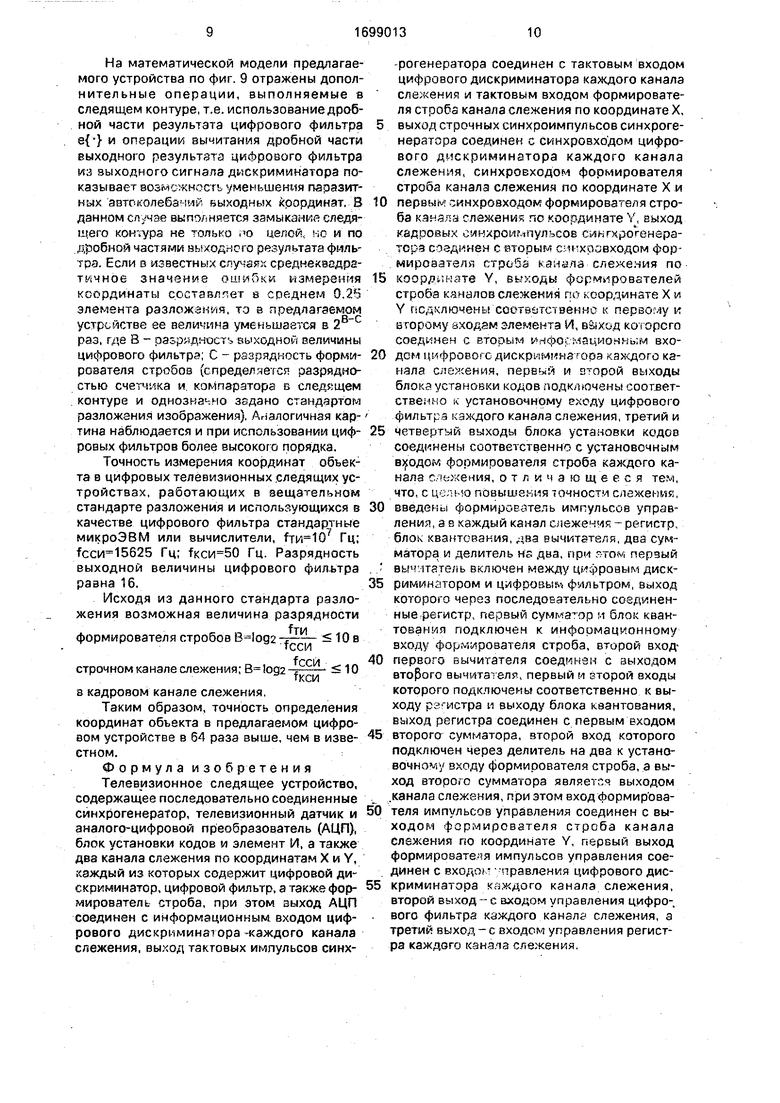
На фиг. 5 приведена схема синхрогене- ратора 1. Импульсы с задающего генератора 39 подаются на делитель 40, который формирует строчную частоту. С выхода делителя 40 импульсы подаются на делитель 41, который формирует кадровую частоту. С помощью формирователей 42-44 формируются последовательности ТИ, ССИ, КСИ соответственно.
Формирователь 18 импульсов управления, вырабатывает oi заднего фронта кадрового строба (Y) три задержанных импульса (It, 1а, 1з), с помсщью которых производится управление записью в регистры блоков 8, 10 и 12. Формирователь 18 содержит последовательно включенные логический элемент НЕ 45, дифференцирующую цепь 46 и блок 47 элементов задержки.
Блок 7 установки кодов содержит набор переключателей 48 с возможностью однократной записи начальных координат строба в блоки 10 и набор переключателей 49 для установки размера строба по строке и кадру в блоках 11 р 16.
На фиг. 8 схематично показаны телевизионный растр, выходные сигналы формирователей строба 11 по координате X и Y и объект, за которым производится слежение. Устройство выполняет функцию слежения за подвижным объектом излучения по видеосигналу от него, который поступает с телевизионного датчика 7. Кроме того, на фиг. 8 изображено пространственное расположение на телевизионном растре импульсов синхрогенератора 1 и формирователя 18 импульсов управления. На фиг. 9 приведена схема алгоритма работы (математическая модель) телевизионного следящего устройства.
Устройство работает следующим образом.
В результате учета особенностей цифрового представления информации в устройстве существенно уменьшаются ошибки измерения координат подвижных объектов в цифровых следящих устройствах. Телевизионный датчик 2 преобразует световое поле в электрический сигнал в заданном стандарте разложения, а аналого-цифровой преобразователь 3 преобразует его в последовательность цифровых кодов в темпе телевизионной развертки и может управляться ТИ. Элемент И б формирует стробирующий импульс по строке и кадру, который выделяет информацию об объекте слежения. Блок 7 установки кодов выполняет функции записи начальных координат строба в цифровые фильтры 10 (ХСо и Yco) и
размеров строба по строке и кадру (RCx и Rcy). Формирователь 18 импульсов управления обеспечивает синхронизацию вычислений в блоках 8, 10 и 12.
5При цифровой реализации сигналы
представлены в виде кодов опредеченной разрядности. Разрядность выходных сигналов цифрового дискриминатора 8 равна А, цифрового фильтра 10 равна В, счетчика 34
Ю и цифровых компараторов 36 и 37 равна С. Количес-00 разрядов 34 и цифровых кооператоров 36 и 07 опоеделяэтся стан ортом разложения исходно о ь еобра- жени. Причем г, канале 4 гг гжен«я го X
15 «ель1, icrec оззрйдоэ С ормен чрозсчно равно целой части or Iog2 fri/i/fco а в канале спежения по Y(5) целой части ог величг ы log Тсги/тУси, где тти - 4JGjTOia тактоеь х импульсов, fcci/i чаи готе строчных ciiHxpo0 импульсов; ткси - частота яачровых синхроимпульсов Таким образом, разрядное ь С в подобных устройствах задала априорно, а разрядноеFM А и В следует выбирать из условие обеспечения минимума ошибки оо5 провождения траектории объекта.
Для построения прецизионных измери телей оординат объекта с го-ностьюв дочи элемен га разложения изображения необходимо чо5ы выполнялось условие В С,
0 т.е. выходная координата должна быть
представлена большим числом разрядов,
чем число элементов разложения построке,
либо по кадру Это обстоятетьство наклады вает fpe6oB3Hwe и на число достоверных
5 разрядов от цифрово о дискриминатора 8, так как А опреде1яет точность первичного вычисления рассогласований центров объекта и строба по строке и кадру
В данном устройстве ошибки мзмере0 ния устраняются за счет введения в каналы слежения по X и Y контура вычисления координат, состоящего из регистра 12 первого сумматора 13, блока 14 квантования, второго блока 15 вычитания, делителя 16 на
5 два и второго 17 сумматора, при этом на вход регистра 12 поступают выходные коор динаты с цифрового фильтра 10. Причем целая часть координаты с выхода блока 14 квантования поступает на входы формиро0 вателя 11 строба и второго блока 15 вычитания, а дробная часть координаты с выхода второго блока 15 вычитания вводится в контур слежения через первый блок 9 вычитания. KOKV.P вычисления координат
5 выполняет магматическую операцию Е{-} взятия целой части числа от поступающего на его вход, а также выполняет математическую операцию е{ } определения дробной части от числа, поступающего на его вход.
Такие операции выполняются с помощью усечения либо округления чисел и выделения остатка от числа. В простейшем случае целая часть координаты определяется выделением старших разрядов цифрового хода с регистра 12, количество которых равно С - разрядности счетчика 34. Дробная часть ко- Ординаты в этом случае определяется выделением младших разрядов цифрового кода с регистра 12, Е оторыа не вошли в код целой части координаты и принципиально не могут изменить положение стробирующчх импульсов по строке и кадру. При гаком построении каналов слежения паразитные автоколебания в чих срываются, а точность M3wepeHMq координат в основном зависит 0г точностных возможностей цифрового ди- ({криммнатора 8. В данном устройстве устранено противоречие между значениями феличмн разрядностей А, В, С и улучшен фдин из основных параметров устройства - {очность определения координат обьекта. то стало возможно за счет устранения автоколебаний в канале следующим образом. Сигнал рассогласования центров Строба и объекта с цифрового дискриминатора 8 в пределах элемента разложения в известных случаях неконтролируемо обрабатывается (накапливался) в цифровом фильтре, который работает по линейному алгоритму, что приводит к периодическому переходу с одной на другую позицию стро- ёирующегс импульса с формирователя Утроба даже при неподвижном объекте. При Введении нелинейной отрицательной обратной связи по дробной части координаты в каналах 4 и 5 слежения через блок 9 к Контур вычисления координаты происходит Срыв автоколебаний и повышается точность (слежения за объектами. Предлагаемое построение цифрового телевизионного следящего устройства реализует точность слежения за объектами в доли элемента разложения.
Стробирующий импульс по строке в предлагаемом устройстве начинается, например, с 100-го элемента и заканчивается 115-м элементом, т.е. центр стробирующего импульса по строке находится в 108-м элементе разложения, Пусти объект, координаты которого определяет устройство, неподвижен и его центр тяжести сдвинут относительно центра 108-го элемента на 0,2 элемента разложения. В этом случае цифровой дискриминатор 8 выдает рассогласование центров объекта и строба, равное 0,2 элемента.
В данных условиях устройство работает следующим образом.
Сигнал рассогласования с цифрового дискриминатора 8 равне 0,2 элемента разложения, но в канал 4 слежения по X дополнительно введен первый блок 9 вычитания,
на суммирующий вход которого поступает это рассогласование, причем исходя из принятых условий дробная часть равна нулю, поэтому в первом кадре выходной сигнал цифрового дискриминатора 8 проходит на
0 вход цифрового фильтра 10 без изменения, т.е. равный 0,2 В следующем кзд- ре строчный строй также начинается с 100- го элемента разлохенмя, но с контура зачисления координат выделенная дробная
5 часть координаты (0.2 элемента разложения) поступает на оычитающий вход первого блока 9 вычитания. На цифровой фильтр 10 в текущее и последующих кадрах поступает нулевой код. Таким образом, автоколебания
0 в следящем канале устраняются и с выхода контура вычисления координат (выход второго сумматора 17} для потребителя снимается координата.объекта с высокой точностью. Сказанное справедливо для обо5 их каналов слежения (по X и Y), для различных траекторий движения объекта при наличии шумов и помех.
Для описанного случая в выходной координате наблюдаются незатухающие коле0 бания с а -тлитудой, равной одному элементу разложения по строке и кадру соответственно. Это объясняется тем, что в пределах одного элемента разложения следящие каналы обычно разомкнуты и проис5 ходит неконтролируемое изменение выходных результатов цифровых фильтров. Это обстоятельство приводит к тому, что точность измерения координат объекта в таких устройствах принципиально не может
0 составлять меньше одного элемента разложения, что не удовлетворяет в большинстве практических случаев.
Для обеспечения работоспособности каналов слежения по X и Y поинципиальным
5 условием является последовательная и синхронная работа его блоков Р, 10, и 12. что обеспечивается формирователем 18 им- пупьсов управления, который по входному сигналу (кадровому стробу с выхода форми0 рователя строба 11 канала 5 слежения по Y) выделяет задний фронт и задерживает его на блоке элементов задержки с отводами 47, Причем импульс с меньшей задержкой Н управляет записью результата з блоке 8, со
5 средней задержкой :-2 управляет записью результата в блоке 10, а с большей задержкой з управляет записью результата в ре- исто 12 каждого из каналов слежения. Коды координат объекта снимаются с выходов блоков 17 каналов слежения по X и Y.
На математической модели предлагаемого устройства по фиг. 9 отражены допол- нительные операции, выполняемые в следящем контуре, т.е. использование дробной части результата цифрового фильтра &{} и операции вычитания дробной части выходного результата цибрового фильтра из выходного сигнала дискриминатора показывает возможность уменьшения паразитных автгколебачи1/ выходных координат, 8 данном случае выполняется замыканиа следя- шего конура не олько («о целой, с и по дробной частями вь ходгюго результата филь- гра. Если в известных случаях среднеквадратичное значение пшиОки измерения координаты составляет в среднем 0, элемента разложения, то в предлагаемом устройстве ее величина уменьшается в раз, где В - разрядность выходной величины цифрового фильтра, С - разрядность форми- рователя стробов (с преде/1 чего1 разрядностью счетчика и компаратора в следящем контуре и однозначно задано стандартом разложения изображения). Диалогичная картина наблюдается и при использовании циф- ровых фильтров более высокого порядка.
Точность измерения координат объекта в цифровых телевизионных следящих устройствах, работающих в вещательном стандарте разложения и использующихся в качестве цифрового фильтра стандартные микроЭВМ или вычислители, Гц; тсси 15625 Гц; Гц. Разрядность выходной величины цифрового фильтра равна 16.
Исходя из данного стандарта разложения возможная величина разрядности
формирователя стробов -z 10 в
строчном канале слежения; В од2-| 10
в кадровом канале слежения,
Таким образом, точность определения координат объекта в предлагаемом цифровом устройстве в 64 раза выше, чем в известном.
Формула изобретения Телевизионное следящее устройство, содержащее последовательно соединенные синхрогенератор, телевизионный датчик и аналого-цифровой преобразователь (АЦП), блок установки кодов и элемент И, а также два канала слежения по координатам X и Y, каждый из которых содержит цифровой дискриминатор, цифровой фильтр, а также формирователь строба, при этом зыход АЦП соединен с информационным входом цифрового дискриминатора-каждого канала слежения, выход тактовых импульсов синх
5 10 15 20 5
0 5
0
5
0
5
-регенератора соединен с тактовым входом цифрового дискриминатора каждого канала слежения и тактовым входом формирователя строба канала слежения по координате X, выход строчных синхроимпульсов синхроге- нератора соединен с синхровходом цифрового дискриминатора каждого канала слежения, синхровходом формирователя строба канала слежения по координате X и первые синхровходом формирователя строба канала слежения по координате Y, выход кадровых синхроимпульсов слигхрогенера- тсрз соединен с вторые с я-хоовходом формирователя строба к знача слежения по каор/ь;ндте V, формирователей строба каналов слежекмя по коордмнате X и У подключены соответственно к перво лу и второму входам элемента И, в&ход ксьорсго соединен с ВТОРЫМ ацмоннь.м входом цифрового дискрии нз ооа каждого канала слехенич, первой и выходы блока установки кодов подключены соответственно к установочному входу цифрового фильтра каждого канала слежения, третий и четвертой выходы блока установки кодов соединены соответственно с установочным входом формирователя строба каждого канала с ьхеиия, отличающееся тем, что, с повышения точности слежения, введены формирователь импульсов управления, а в каждый канал слежения - регистр, блок квантования, два вычмтателя, два сумматора и делитель HS два, при -гон перзый выч 1татель включен между цифровым дискриминатором и цифровым фильтром, выход которого чеоез последовательно соединенные регистр, первый и блок квантования подключен к инфоомац онному входу формирователя строба, второй вход- первого вычитателя соединен с выходом второго вычита елг, первый и второй входы которого подключены соответственно к выходу р -истра и выходу блока квантования, выход регистра соединен с первым входом второга сумматора, второй вход которого подключен через делитель на два к установочному входу формирователя строба, а выход второго сумматора является выходом .канала слежения, при этом вход формирователя импульсов управления соединен с выходом формирователя строба канала слежения по координате Y, первый выход форммровате-чя импульсов управления соединен с входо правления цифрового дискриминатора каждого канала слежения, второй выход-с входом управления цифрового фильтра каждого канала слежения, а третий выход-с входом управления регистра каждого кэнята слежения.
щ
им
U 9 Z VQ Я «
ЮЗ
&
itevgv
HI
гъ
9Щ (AjxlpuMJ
/ s/gLUQ
/чшшпда оох лзнччоявн доу
г/
6Ј
V с
СЮ6691
Фиг. 6
Код Хсо к длЛО КодУсо
КодЯг N . кодКгч .№rЯк Sjx H«s $к М Нку Зл) Ясх fHcxl
/ оу Р . /°, Л л Л
48
|RWI jRry/ ;
f A I1 1
vi A A / /
ylc/v. / / /
II I «I I
n
ч i
наборы лерек лн}уателей
n
, „Запись
|- начальных координат cmpoffa,
Фие.7
КодЯг N . кодКгч М . fHcxl
|RcX |RWI jRry/ ;
II
лн
n
HoffX
Строй X фие.8
Растр, usofy&ftettf
JFmpobi
| Цифровое телевизионное следящее устройство | 1975 |
|
SU559456A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
