выхода коммутатора 8 цифровой код поступает одновременно на входы блока 9 определения максимума и блока 10 определения минимума, где происходит вычисление значений максимальной и минимальной величин сигнала в соответствии с алгоритмами
h2 макс X(t),
hi f мин X(t), где X(t) - выходной сигнал коммутатора 8;
h2 - максимальное значение сигнала X(t),
hi - минимальное значение сигнала X(t),
t - время текущего кадра.
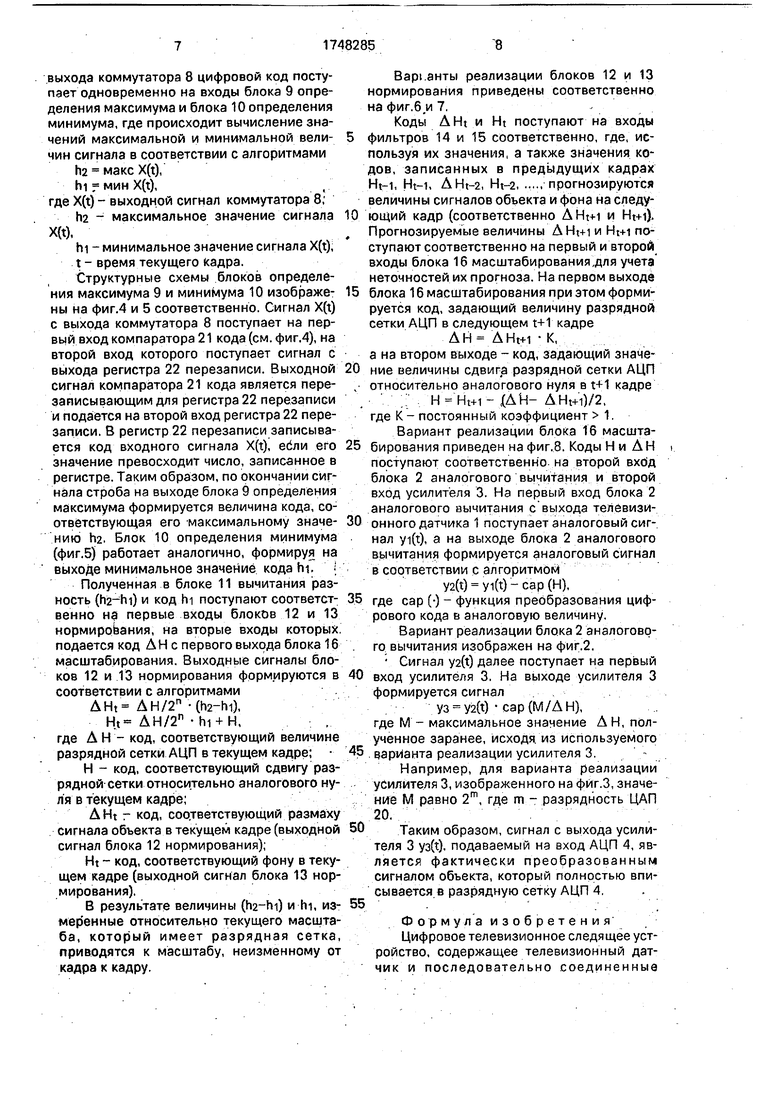
Структурные схемы блоков определения максимума 9 и минимума 10 изображены на фиг.4 и 5 соответственно. Сигнал X(t) с выхода коммутатора 8 поступает на первый вход компаратора 21 кода (см. фиг.4), на второй вход которого поступает сигнал с выхода регистра 22 перезаписи. Выходной сигнал компаратора 21 кода является перезаписывающим для регистра 22 перезаписи и подается на второй вход регистра 22 перезаписи. В регистр 22 перезаписи записывается код входного сигнала X(t), ебли его значение превосходит число, записанное в регистре. Таким образом, по окончании сигнала строба на выходе блока 9 определения максимума формируется величина кода, соответствующая его максимальному значению П2. Блок 10 определения минимума (фиг.5) работает аналогично, формируя на выходе минимальное значение кода hi.
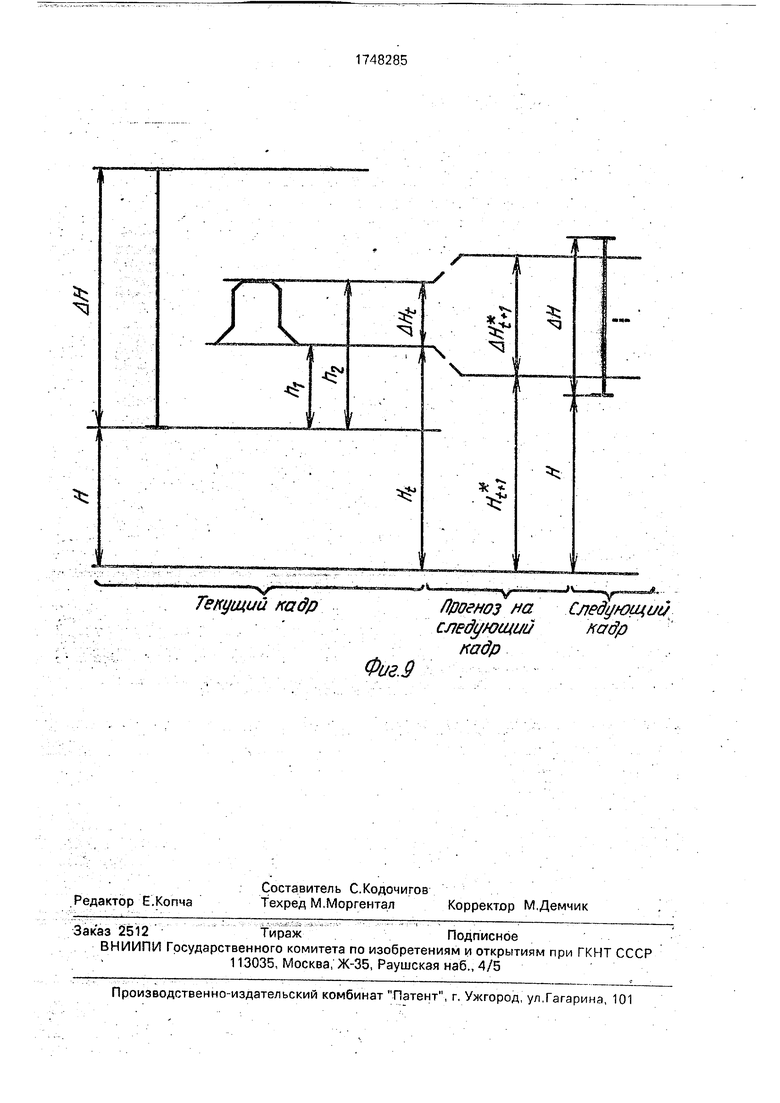
Полученная в блоке 11 вычитания разность () и код hi поступают соответственно на первые входы блоков 12 и 13 нормирования, на вторые входы которых подается код ДН с первого выхода блока 16 масштабирования. Выходные сигналы блоков 12 и 13 нормирования формируются в соответствии с алгоритмами AHt ДН/2П -(h2-hi), Ht- AH/2n -hi + H,
где АН- код, соответствующий величине разрядной сетки АЦП в текущем кадре;
Н - код, соответствующий сдвигу разрядной сетки относительно аналогового нуля в текущем кадре;
AHt - код, соответствующий размаху сигнала объекта в текущем кадре (выходной сигнал блока 12 нормирования),
Ht - код, соответствующий фону в текущем кадре (выходной сигнал блока 13 нормирования).
В результате величины () и hi, измеренные относительно текущего масштаба, который имеет разрядная сетка, приводятся к масштабу, неизменному от кадра к кадру.
Bapi анты реализации блоков 12 и 13 нормирования приведены соответственно на фиг.б.и 7,
Коды AHt и Ht поступают на входы
фильтров 14 и 15 соответственно, где, используя их значения, а также значения кодов, записанных в предыдущих кадрах
Ht-1, Ht-1, AHt-2, Ht-2прогнозируются
величины сигналов объекта и фона на следующий кадр (соответственно ДНм-1 и Ht+i),
Прогнозируемые величины Д Ht+i и Ht+1 поступают соответственно на первый и второй входы блока 16 масштабирования,для учета неточностей их прогноза. На первом выходе
блока 16 масштабирования при этом формируется код, задающий величину разрядной сетки АЦП в следующем t-M кадре
Д Н Д Ht+1 К, а на втором выходе - код, задающий значение величины сдвига разрядной сетки АЦП относительно аналогового нуля в t+1 кадре
H (ДН- ДНн1)/2. где К - постоянный коэффициент 1
Вариант реализации блока 16 масштабирования приведен на фиг.8. Коды Н и ДН поступают соответственно на второй вход блока 2 аналогового вычитания и второй вход усилителя 3. На первый вход блока 2 аналогового вычитания с выхода телевизиэнного датчика 1 поступает аналоговый сигнал yi(t), а на выходе блока 2 аналогового вычитания формируется аналоговый сигнал в соответствии с алгоритмом V2(t) yi(t) - cap (H),
где cap ()-функция преобразования цифрового кода в аналоговую величину.
Вариант реализации блока 2 аналогового вычитания изображен на фиг.2. Сигнал y2(t) далее поступает на первый
вход усилителя 3. На выходе усилителя 3 формируется сигнал
уз У2(т.) сар(М/ДН), где М - максимальное значение ДН, полученное заранее, исходя из используемого
варианта реализации усилителя 3.
Например, для варианта реализации усилителя 3, изображенного на фиг.З, значение М раено 2т, где т - разрядность ЦАП 20.
Таким образом, сигнал с выхода усилителя 3 ya(t), подаваемый на вход АЦП 4, является фактически преобразованным сигналом объекта, который полностью вписывается в разрядную сетку АЦП 4.
Формула изобретения Цифровое телевизионное следящее устройство, содержащее телевизионный датчик и последовательно соединенные
- графическая иллюстрация работы устройства.
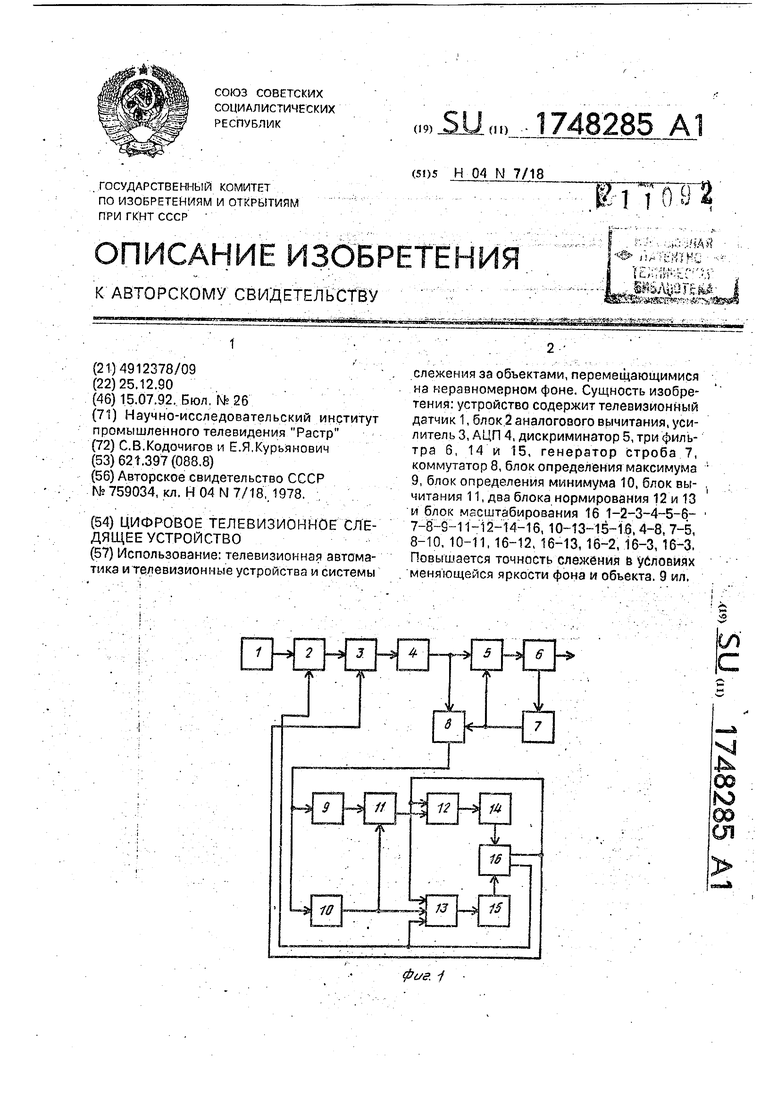
Цифровое телевизионное следящее устройство содержит телевизионный датчик f, блок 2 аналогового вычитания, усилитель 3, АЦП 4, дискриминатор 5, первый фильтр 6, генератор 7 строба, коммутатор 8, блок 9 определения максимума, блок 10 определения минимума, блок 11 вычитания, первый блок 12 нормирования, второй блок 13 нормирования, второй фильтр 14, третий фильтр 15, блок 16 масштабирования. К выходу телевизионного датчика 1 подключены последовательно соединенные блок 2 аналогового вычитания, усилитель 3, АЦП 4, дискриминатор 5, первый фильтр 6, первый выход которого является выходом цифрового телевизионного следящего устройства, генератор 7 строба, выход которого соединен с вторым входом дискриминатора 5, и коммутатор 8, второй вход которого соединен с выходом АЦП 4, а к выходу подключены последовательно соединенные блок 9 определения максимума, блок 11 вычитания, первый блок 12 нормирования, второй фильтр 14 и блок 16 масштабирования, последовательно соединенные блок 10 определения минимума, второй блок 13 нормирования и третий фильтр 15, выход которого соединен с вторым входом блока 16 масштабирования, первый выход которого соединен с вторым входом усилителя 3 и вторыми входами блоков 12 и 13 нормирования, а второй выход соединен с третьим входом второго блока 13 нормирования и вторым входом блока 2 аналогового вычитания, а второй вход блока 11 вычитания соединен с выходом блока 10 определения минимума. Устройство содержит также аналоговый вычитатель 17, ЦАП 18, дифференциальный усилитель 19, ЦАП 20, компаратор 21, регистр 22, компаратор 23, регистр 24, умножитель 25. делитель 26 на 2П, . умножитель 27, делитель 28 на 2П, сумматор 29, умножитель 30 на постоянный коэффициент К, вычитатель 31, делитель 32 на 2, вычитатель 33.
Устройство рабЬтает следующим образом ,
В соответствии с решаемыми задачами - поиск целей и слежение за ними, устройство имеет два режима работы: режим обнаружения цели и режим измерения ее координат. В режиме обнаружения цели устройство производит последовательный поэлемент-1 ный анализ всего поля зрения. В случае обнаружения объекта стробируются его текущие координаты. В режиме измерения координат устройство.производит анализ информации внутри строба
В режиме слежения положение центра строба сравнивается с положением энергетического центре видеоимпульса от объекта. Выработанная на основе сравнения 5 сигналов ошибка изменяет положение строба в растре (по строкам и по кадру). При этом телевизионный сигнал, соответствующий полю зрения устройства, формируется телевизионным датчиком 1. С выхода телевизи- . 10 онного датчика 1 сигнал через блок 2 аналогового вычитания и усилитель 3 поступает на вход АЦП 4, который преобразует- видеосигнал в цифровую форму. Далее видеосигнал в цифровой форме поступает на
5 вход дискриминатора 5, где формируется сигнал ошибки рассогласования положения объекта и центра следящего строба в каждом текущем кадре. Фильтр 6, на вход которого поступает сигнал ошибки, формирует
0 цифровой код координат X и Y. положения центра объекта по строке и по кадру, а также сигналы управления, предназначенные для управления генератором 7 строба. Последний вырабатывает следящий строб, положе- 4
5 ние которого на телевизионном растре соответствует координатам изображения 5 объекта. При слежении за реальными объектами амплитуда видеосигнала изменяется из-за изменений в освещенности объекта и
0 яркости фона. Изменение амплитуды видеосигнала приводит к снижению точности преобразования аналогового сигнала в цифровой код, что, в свою очередь, уменьшает точность определения координат объекта
5 слежения. Поэтому в предлагаемом устройстве в каждом текущем кадре производится оценка сигнала объекта и фона с целью коррекции видеосигнала следующего кадра для вписывания его в разрядную сетку АЦП. При
0 этом квантование сигнала объекта осуществляется на максимально возможное для данного АЦП число уровней, что уменьшает погрешность преобразования аналогового сигнала объекта в цифровой код и увеличи5 вает точность определения координат объекта в устройстве в целом.
Под разрядной сеткой АЦП подразумевается величина опорного напряжения, подаваемого на АЦП, относительно которого
0 осуществляется аналого-цифровое преобразование сигнала. Если л -число разрядов АЦП, то цифровой эквивалент разрядной сетки равен 2П квантов.
На фиг.9 приведено условное изобра5 жение сигнала объекта в одной строке наГ входе АЦП 4 с иллюстрацией используемых далее обозначений. Цифровой код сигнала с выходов АЦП 4 поступает на входы коммутатора 8, где стробируется сигналом, поступающим с выхода генератора 7 строба. С
аналого-цифровой преобразователь (АЦП), дискриминатор первый фильтр, первый выход которого является выходом цифрового телевизионного следящего устройства, и генератор строба, выход которого соединен с вторым входом дискриминатора, отличающееся тем, что, с целью повышения точности слежения, введены последовательно соединенные блок аналогового вычитания, первый вход которого соединен с выходом телевизионного датчика, и усилитель, выход которого соединен с входом АЦП, коммутатор, два входа которого соединены соответственно с выходами АЦП и генератора строба, последовательно
0
5
соединенные блок определения максимума, блок вычитания, первый блок нормирования второй фильтр и блок масштабирования, и последовательно соединенные блок определения минимума, второй блок нормирования и третий фильтр, выход которого соединен с вторым входом блока масштабирования, первый выход которого соединен с вторым входом усилителя и вторыми входами первого и второго блоков нормирования, а второй выход - с третьим входом второго блока нормирования и вторым входом блока аналогового вычитания, второй вход блока вычи/ания соединен с выходом блока определения минимума
| название | год | авторы | номер документа |
|---|---|---|---|
| Телевизионное следящее устройство | 1989 |
|
SU1699013A1 |
| СПОСОБ СЛЕЖЕНИЯ ЗА ОБЪЕКТОМ И ЦИФРОВАЯ ТЕЛЕВИЗИОННАЯ СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2440691C1 |
| ТЕЛЕВИЗИОННЫЙ АДАПТИВНЫЙ ИЗМЕРИТЕЛЬ КООРДИНАТ | 1988 |
|
SU1623536A1 |
| ТЕЛЕВИЗИОННЫЙ КООРДИНАТНЫЙ ДИСКРИМИНАТОР | 1996 |
|
RU2143182C1 |
| ТЕЛЕВИЗИОННЫЙ ИЗМЕРИТЕЛЬ КООРДИНАТ | 1985 |
|
SU1454225A1 |
| ТЕЛЕВИЗИОННОЕ СЛЕДЯЩЕЕ УСТРОЙСТВО | 1988 |
|
SU1574152A1 |
| ТЕЛЕВИЗИОННЫЙ КООРДИНАТНЫЙ ДИСКРИМИНАТОР | 1996 |
|
RU2139640C1 |
| Устройство для формирования цифрового видеосигнала | 1988 |
|
SU1552403A1 |
| Устройство для измерения временного положения импульса | 1984 |
|
SU1185283A1 |
| ТЕЛЕВИЗИОННЫЙ КООРДИНАТНЫЙ ДИСКРИМИНАТОР | 1986 |
|
SU1443763A1 |
Фиг 8
Фиг.9