(54) СИСТЕМА ТЕЛЕСИГНАЛИЗАЦИИ С ВРЕМЕННЫМ РАЗДЕЛЕНИЕМ
1
, Изобретение относится к автоматике и телемеханике и может быть использовано для контроля состояний рассредоточенных объектов.
Известна телемеханическая система Радиус, в которой содержится приемное устройство и группа периферийных устройств, причем приемное устройство содержит блок синхронизации, формирователь синхроимпзшьсов, формирователь тактовых импульсов, блок приема и блок оконченного преобразования. Каждое периферийное устройство роцср-жит, в свою очередь, гене ратор импульсов, блок приема синхронизации, блок приема тактовых импулЬсов, распределитель и формирователь ответного импульса ГО
Опрос периферийных устройств в системе осуществляется циклически. Каждый цикл начинается передачей с приемного устройства в линию связи;, соединяющую его с периферийными устройствами, синхроимпульса, после коКАНАЛОВ
торого следует передача серии такто вых импульсов, каждый из которых задает интервал передачи информации для одного из периферийных устройств. В режиме телесигнализации каждое из периферийных устройств отвечает импульсом, передаваемым им в пределах отведенного для него интервала.
Недостатком такой системь: является ее сложность, связанная с наличием в каждом периферийном устройстве распределителя, обеспечивающего вьщелеиие соответству1вщего тактового импульса из общей последовательности с целью привязки к данному периферийному устройству определенного временного интервала для передачи информашш. Этот недостаток проявляется наиболее характерно в случаях, когда подключение периферийных устройств к линии связи осуществляется строго последовательно, т.е..линия связи имеет иитев1едную структуру, без разветвлений.
Наиболее близка по технической ущности к предложенной система теле игнализации с временным разделением аналов, содержащая N последовательно соединенном периферийных устройств, j аждое из которых содержит блок приема тактовьпс импульсов и блок приема синхроимпульсов, входы которых подключены к первому входу периферийного устройства, второй вход которого IQ соединен с первым входом регистра сдвига, сигнальные входы периферийного устройства подключены к соответструющим вторым входам регистра сдвига, третий вход которого соединен с выхо- jj дом блока приема тактовых импульсов, вь1ход регистра сдвига подключен к первому входу периферийного устройства, приемное устройство, вход которогб подключен к линии связи, содержащее20 блок синхронизации, формирюватель синхроимпульсов и формирователь тактовых импульсов, регистр сдвига, выход которого подключен к первому входу элемента И, выход элемента И соеди-25 нен со входом блока оконечного преобра зования 27.
Недостаток этой системы - ее сложность и большое количество разнотипных функциональных блоков.30
Цель изобретения - упрощение системы.
Поставленная цель достигается т&я, что на каждом периферийном устройстве введены селективный элемент и инвер- 35 тор, йход и выкод селективного элемента соединены соответственно с первым и вторым входами периферийного устройства, первьй выход блока приема синхроимпульсов подключен к третьему 40 входу регистра сдвига, а второй выход блока приема синхроимпульсов через инвертор соединен, с четвертым входом регистра сдвига, в приемном устройстве первый и второй выходы блока синхро- 45 низаздш соединены соответственно через формирователь синхроимпульсов и через формирователь тактовых импульсов со входом приемного устройства и с первым входом регист1 а сдвига, пер- 50 вый выход блока синхронизации подключен ко второму входу элемента И.
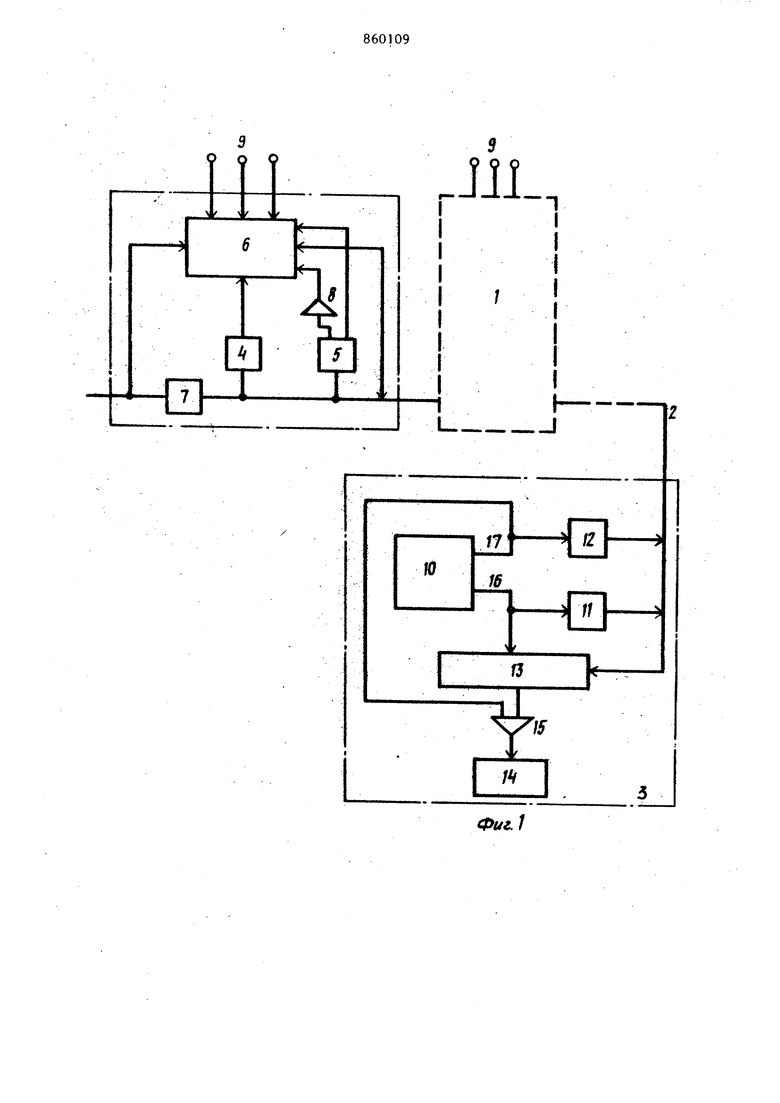
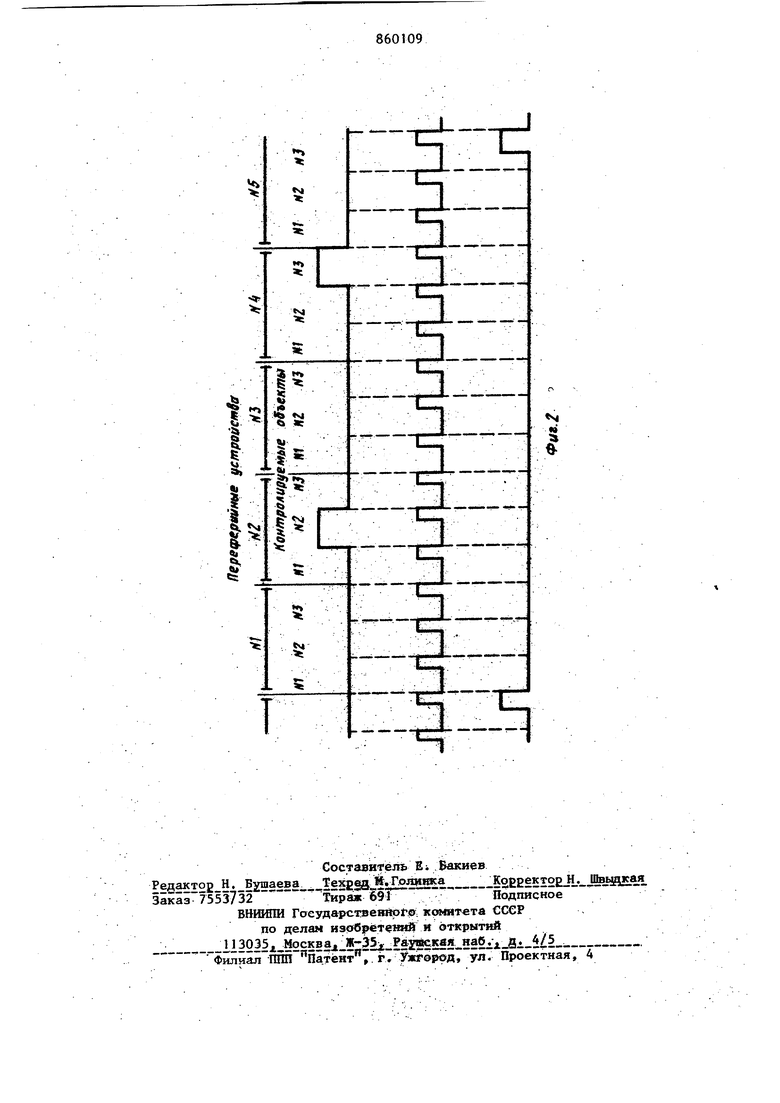
На фиг. 1 представлена схема системы; щ фиг. 2 временные диаграммы её работц.55
Система содержит группу периферийкых устройств I, соедннентаос через линию связи 2 с приемн|«4 устройством 3.
Каждое периферийное устройство 1 содержит блоки приема тактовых импулсов 4 и синхроимпульсов 5, регистр 6 сдвига, селективный элемент 7 и инвертор 8, входы устройства 9.
Приемное устройство 3 содержит блок 10 синхронизации, формирователи тактовых импульсов 11 и синхроимпульсов 12, регистр 13 сдвига, блок 14 оконечного преобразования и элемент И 15.
Система работает следукнцим образом.
При работе системы блоком 10 синхронизации постоянно осуществляется генерация на его выходе 16 последовательности тактовых импульсов (диаграмма II на фиг. 2) и синхроимпульсов 17 (диаграмма III на фиг.2 Работа системы осзпцествляется циклически, причем цикл задается интервалом между очередными синхроимпульсам
Работу системы удобно, рассмотреть с момента, когда в линию связи 2 одновременно выводятся синхроимпульс и тактовый импульс, причем формирователи тактовых импульсов 11 и синхроимпульсов 12 обеспечивают при выводе в линию связи 2 такое представление этих импульсов, которое позволяет осществить их надежное разделение в периферийных устройствах 1 (например с использованием 4М с различными несущими) .
При приеме блоком 5 приема синхроимпульсов каждого из периферийных усройств 1 синхроимпульса, на выходе этого блока фо15мируется сигнал, поступаннций на вход разрешения записи регистра 6 сдвига.
Этот же сигнал через инвертор 8 поступает на вход разрешения сдвига того е регистра, вызывая запрещение сдвига. Вьвделяемый одновременно блоком 4 приема тактовых импульсов тактовый импульс поступает на тактирующий вход регистра сдвига 6, обеспечивая тем самым запись в него сигналов с входов 9 устройства, отображающих текущее состояние подключенных к этому периферийному устройству 1 контролируемьк объектов.
В дальнейшем в пределах цикла на входы периферийных устройств продолжается поступление,только тактовых импульсов, причём в момент поступления кавдого из них.на выходе I блока 5 приема синхроимпульсов при58сутствует сигнал, запрещающий запись в регистр 6 сдвига, и, благодаря наличию инвертора 8, разрешающий сдвиг в этом регистре. При этом сигнал с выхода регистра 6 сдвига одного периферийного устройства 1 поступает на вход регистра 6 сдвига периферийного устройства 1, ближайшего к первому в направлении к приемному устройству 3. Сигнал с выхода регистра 6 сдви га периферийного устройства 1, ближайшего к приемному устройству 3, поступает через линию 2 связи на вход регистра 13 сдвига приемного устройства (см. диаграмму Г на фиг. 2) , на тактирующий вход которого поступа ют тактовые импульсы с выхода 16 блока 10 синхронизации, благодаря чему в регистр сдвига 13 за время цикла оказывается записанным в позиционном виде состояние всех контролируемых объектов, подключенных к системе. Диаграмма на фиг. 2 приведена для пяти периферийных устройств в системе к каждому из них подключено по 3 KOHT ротируемых объекта, причем объект № 2 периферийного устройства № 2 и № 3 периферийного устройства№4 находятся в состоянии I, а остальные в состоянии О . Поступление сигналов с вьгхода любого из регистров 6 сдвига на его собственный вход и на входы других регистров 6 сдвига, кроме регистра сдвига ближайшего последующего периферийного устройства 1, исключается благодаря наличию селективных элементов 7, запрещающих прохождение потенциальных сигналов и разрешающих прохождение чacтoтнo-мoдyJшpoвaнныx сиг налов. При формировании блоком 10 синхро низации на его выходе 17 очерёдного синхроимпульса отпирается элемент И и данные из регистра 13 сдвига переписываются в блок 14 оконечного преобразования. Система вновь работает по описанному ранее циклу. Таким образом, в системе достигается существенное Сокращение используемого оборудования.благодаря отсут ствию необходимости иццивидуального обращения приемного устройства к каж дому из периферийных устройств для получения информации. 9 Формула изобретения Система телесигнализации с временным разделением каналов, содержащая N последовательно соединенных периферийных устройств, каждое из которых содержит блок приема тактовых импульсов и блок приема синхроимпульсов, входы которьсх подключены к первому входу периферийного устройства, второй вход которого соединен с первым входом регистра сдвига, сигнальные входы периферийного устройства подключены к соответствующим вторым входам регистра сдвига, третий вход которого соединен с выходом блс::а приема тактовых импульсов, выход регистра сдвига подключчн к первому входу периферийного устройства, приемное устройство, вход которого подключен к линии связи, содержащее блок синхронизации, формирователь синхроимпульсов и формирователь тактовых импульсов, регистр сдвига, выход которого подключен к первому входу элемента И, выход элемента И соединен со входом блока оконечного преобразования, отличающаяся тем, что, с целью упрощения системы, на каждом периферийном устройстве введены селективный элемент и инвертор, вход и выход селективного элемента соединень соответственно с первым и вторым входами периферийного устройства первый выход блока приема синхроимпульсов подключен к третьему входу регистра сдвига, а второй выход блока приема синхроимпульсов через инвертор соединен с четвертым входом регистра сдвига, в приемном устройстве первый и второй выходы блока синхронизации соединены соответственно через формирователь синхроимпульсов к через формирователь тактовых импульсов со входом приемного устройства и с первым входом регистра сдвига, первый выход блока синхронизации подключен ко вторе 1у входу, элемента И. Источники информации, принятые во внш4ание при экспертизе 1. Тутевнч В.Н. Телемеханика. М., 1973, с. 324. 2. Авторское свидетельство СССР 478346 кл. G 08 С 19/28, 1974 прототип).
5
JJL,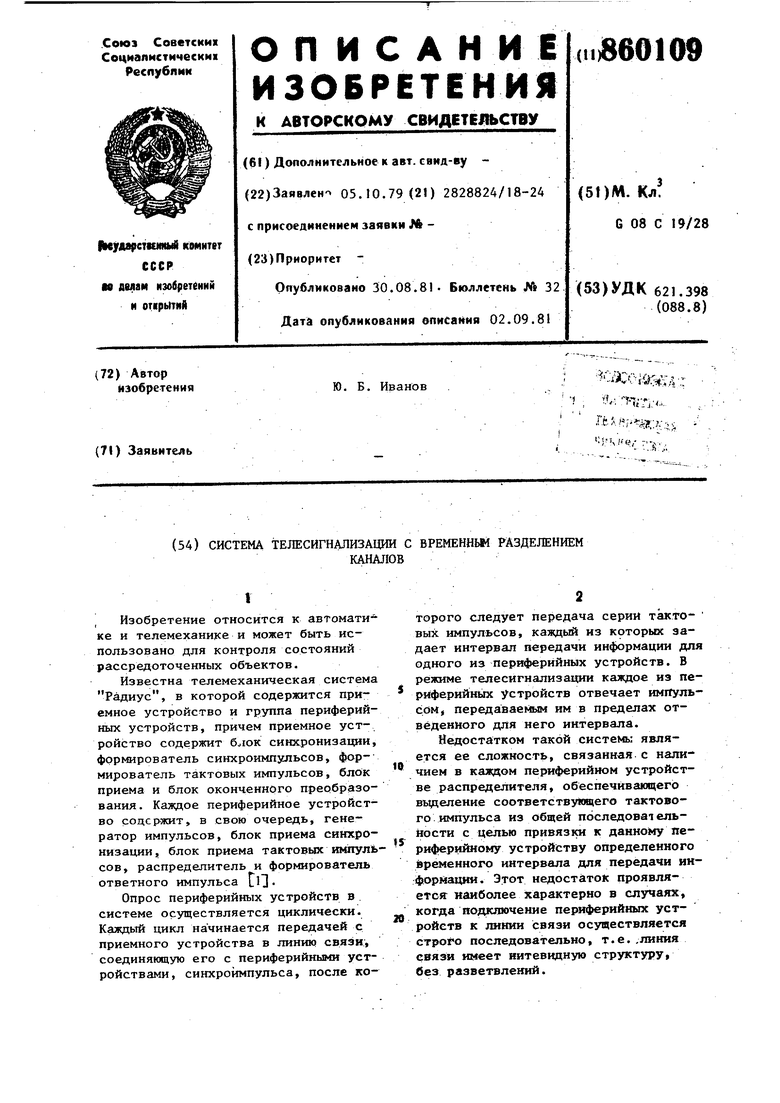
| название | год | авторы | номер документа |
|---|---|---|---|
| Система для телесигнализации с временным разделением каналов | 1981 |
|
SU978177A1 |
| Устройство для телесигнализации с временным разделением каналов | 1981 |
|
SU976463A1 |
| Система телесигнализации с временнымРАздЕлЕНиЕМ СигНАлОВ | 1979 |
|
SU841001A1 |
| Система телесигнализации | 1978 |
|
SU748489A1 |
| Система телемеханики | 1981 |
|
SU1005142A1 |
| Устройство приема двоичной информации в последовательном коде | 1991 |
|
SU1771075A1 |
| Приемное устройство системы телесигнализации | 1979 |
|
SU773673A1 |
| Телемеханическая система | 1983 |
|
SU1211783A1 |
| Приемное устройство системы телемеханики | 1977 |
|
SU682933A2 |
| Устройство для передачи и приема цифровой информации | 1986 |
|
SU1322344A1 |
Фиг. 1
