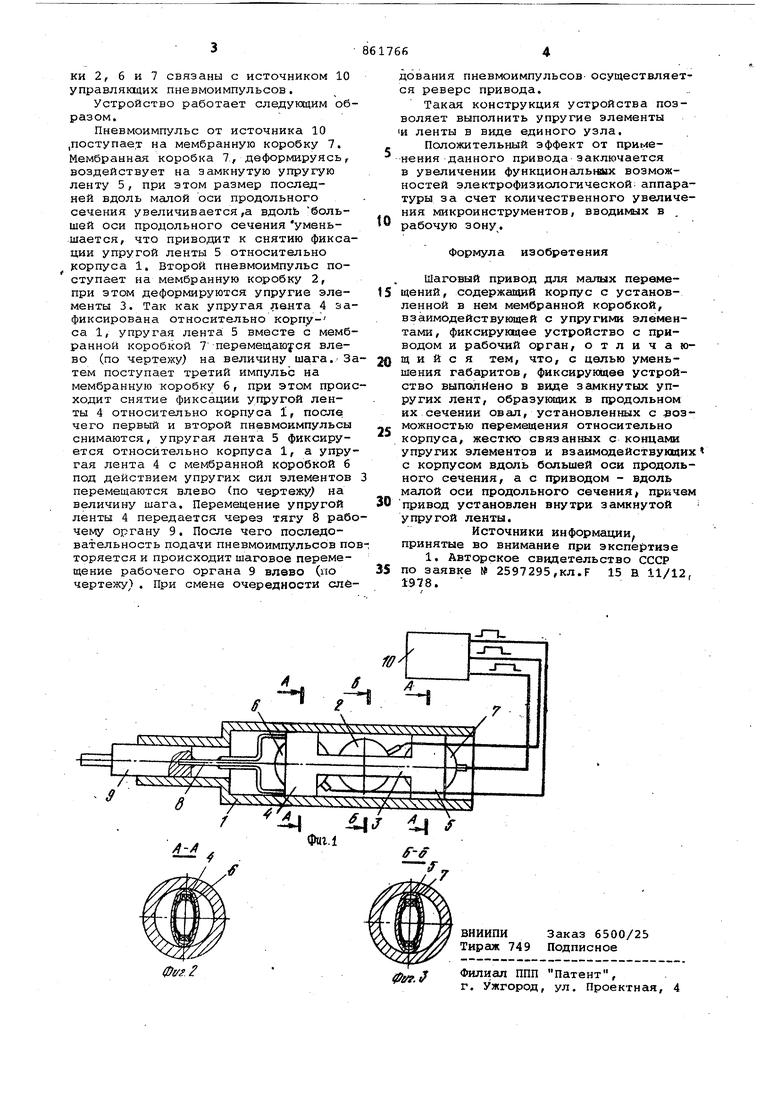
Изобретение относится к шаговым гидропневмоприводам для малых перемв щений, например, микроинструмеята, применяемхх в электрофиэиологиЧеакой аппаратуре, и может быть использовано в микроманипуляторах для исследов ния нервньис клеток и тканей в биологии и медицине, а также при сборке микроэлементов в радиоэлектронной технике. Известен шаговый привод для-MantJix перемеще ний, содержащий корпус о уст новленной в нем мембранной коррб:КОЙ, взаимодействующей с упругими элементами, фиксирующее устройство с прнво дОм и рабочий орган. Недостатками известного устрсйсЛва являются сложность конструкции и большие габариты, обусловленные раздельиым исполнением у пру згих элементов и фиксирующего устройства к, кроме того, жесткой установкой 1фивода последнего. Большие габариты ус ройства не позволяют при микробиопбгических исследованиях на клеточном уровне и прецизионных работеис вводит в рабочую зону большое количество микроинструментов. Целью изобретения является уменьшение габаритов привода. Это достигается тем, что фиксирующее устройство выполнено в виде згимкнупдх упругих лент обраэунхдах в продольном их сечении овал, установленный с возможностью перемещения относительно корпуса, жестко связанных с :; концами упругих элементов и взаимодейств укщих с корпусом вдоль большей оси продольного сечения, а с приводсмл вдоль малой оси продольного сечения, причемпривод установлен внутри замошутой утфугой ленты. На г. 1 схематически изображен 1федложенный привод; на фиг. 2 - разреэ А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1. . Шаговый цривод содеряшт цилиндрический корпус 1 с установленной в нем мембранной коробкой 2, вз гшмодействуюМей с упругими элементами 3, фиксирух -щ&& устройство с п{Я1водом, выполненное в виде замкнутых упругих лент 4 я 5, образутакх Р продольном сечении овал и жестко связанных с концами упругих элементов 3. П1Я1ВОД включает две мембранные коробки б и 7, установленные внутри соответствующих упругих лент 4 и S упругая лента 4 связана т/ягой 8 с рабочим органом 9. Мембранные коробки 2, 6 и 7 связаны с источником 10 правляющих пневмоимпульсов.
Устройство работает следующим образом.
Пневмоимпульс от источника 10 поступает на мембранную коробку 7. Мембранная коробка 7, деформируясь, воздействует на замкнутую упругую ленту 5, при этом размер последней вдоль малой оси продольного сечения увеличивается,а вдоль большей оси продольного сечения уменьшается, что приводит к снятию фиксации упругой ленты 5 относительно корпуса 1. второй Пневмоимпульс поступает на мембранную коробку 2, при этом деформируются упругие элементы 3. так как упругая лента 4 зафиксирована относительно корпуса 1, упругая лента 5 вместе с мембранной коробкой 7 перемещаются влево (по чертежу) на величину шага. Затем поступает третий импульс на мембранную коробку 6, при этом происходит снятие фиксации упругой ленты 4 относительно корпуса I, после чего первый и второй пневмоимпульсы снимаются, упругая лента 5 фиксируется относительно корпуса 1, а упругая лента 4 с мембранной коробкой 6 под действием упругих сил элементов 3 перемещаются влево (по чертежу; на величину шага. Перемещение упругой ленты 4 передается через тягу 8 рабочему органу 9. После чего последовательность подачи пневмоимпульсов повторяется и происходит шаговое перемещение рабочего органа 9 влево (по чертежу). При смене очередности слбДования пневмоимпульсов осуществляется реверс привода.
Такая конструкция устройства позволяет выполнить упругие элементы 1и ленты в виде единого узла.
Положительный эффект от применения данного привода заключается в увеличении функционалыаах возможностей электрофизиологической: аппаратуры за счет количественного увеличения 1 шкроинструментов, вводимых в . рабочую зону.
Формула изобретения
Шаговый привод для малых переме5 щений, содержащий корпус с установленной в нем мембранной коробкой, взаимодействующей с упругими элементами, фиксирующее устройство с приводом и рабочий орган, отличающийся тем, что, с целью уменьшения габаритов, фиксирующее устройство выполнено в виде замкнутых упругих лент, образующих в продольном их сечении овал, установленных с возможностью перемещения относительно корпуса, жестко связанных с концами упругих элементов и взаимодействуквдих с корпусом вдоль большей оси продольного сечения, а с приводом - вдоль малой оси продольного сечения причем 0 привод установлен внутри замкнутой упругой ленты.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР 5 по заявке 2597295,кл.Р 15 В 11/12, 1978.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛИНЕЙНЫЙ ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2002 |
|
RU2227957C1 |
| ГИДРОДИНАМИЧЕСКАЯ БЕССТУПЕНЧАТАЯ КОРОБКА ПЕРЕДАЧ | 1999 |
|
RU2151936C1 |
| ПРОТЕЗНОЕ УСТРОЙСТВО ДЛЯ ПОДДЕРЖАНИЯ ПРОСВЕТА СОСУДА ИЛИ ПОЛОГО ОРГАНА | 1993 |
|
RU2120253C1 |
| ЛИНЕЙНЫЙ ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2002 |
|
RU2227956C1 |
| Модуль манипулятора | 1987 |
|
SU1442393A1 |
| РУДОСЕПАРАЦИОННЫЙ МОДУЛЬ | 2010 |
|
RU2422210C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ И СБОРКИ/РАЗБОРКИ ВОЛНОВОЙ ГЕРМЕТИЧНОЙ ПЕРЕДАЧИ И УСТРОЙСТВО ДЛЯ ИХ ОСУЩЕСТВЛЕНИЯ Абрамова В.А. | 2014 |
|
RU2568626C1 |
| ЖАТКА-КОЛОСОУБОРКА | 2011 |
|
RU2467552C1 |
| СПОСОБ РАСФАСОВКИ СТАЛЬНЫХ ГВОЗДЕЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2111907C1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ЛИНЕЙНЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 1996 |
|
RU2156535C2 |
