.1, .
Изобретение относится к машиноётроению и может быть использовано в.различных машинах для преобразования вращательного движения в возвратно-поступательное и наоборот.
Известен планетарный механизм, содержащий неподвижное центральное колесо, -ведущее водило с промежуточным двухвёнцовым и ведомым сателлитами, последний из которых имеет палец, совершающий при соответствующем выборе соотношений чисел зубьев центрального колеса и дополнительного сателлита возвратно-поступательное движение l.
К недостаткам этого механизма относится то, что величина поступательного хода пальца ведомого сателлита зависит от размеров колес, вследствие этого при необходимости малых ходов колеса получаются маленькими и имеют низкую нагрузочную способность.
Ближайшим по технической сущности к предлагаемому является механизм возвратно-поступательного движения, содержащий ведущий вал, ведомое звено, кривошип, два взаимодействующих между собой и имеющих одинаковые .числа зубьев сателлита, один из которых закреплен на кривошипе, а другой имеет шарнирно связанный с ведомым, звеном эксцентричный палец, эксцентриситет которого равен радиусу кривошипа 2. Этот механизм имеет также стягивающий сателлиты обод, обеспечивающий постоянство их межцентрового расстояния.
К недостаткам этого механизма относится его относительно низкая долговечность, что обусловлено наличием трения между ободом и вращающимся относительно своей оси сателлитом.
Целью изобретения является повышение долговечности механизма.
Эта цель обеспечивается тем, что механизм снабжен имеющим радиус, одинаковый с радиусом основного кривошипа, и парсшлельным ему в плоскости вращения дополнительным кривошипом, на котором установлен с возможностью вращения относите)1ьно своей оси сателлит, имеиядий эксцентричный палец, а ведущий вал идентичными кинематическими цепями связан с обоими кривошипами .
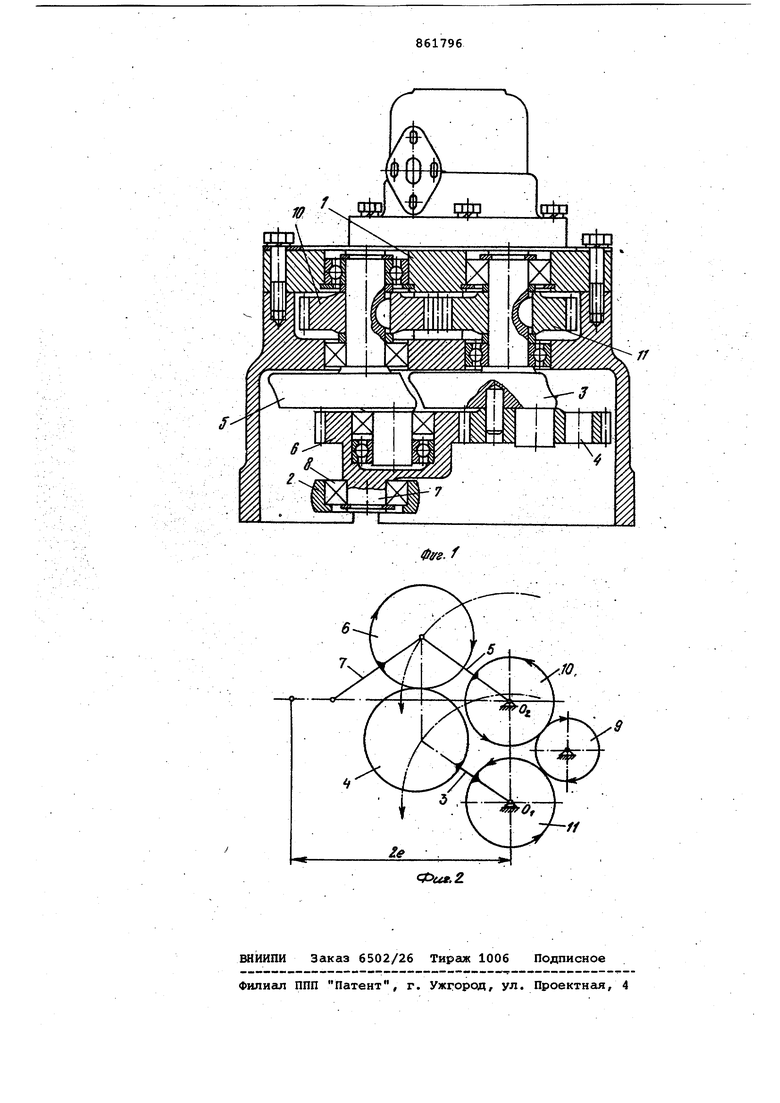
На фиг. 1 изображен механизм возвратно-поступательного движения, продольный разрез; на фиг. 2 - его -кинематическая схема.
Механизм возвратно-поступательного движения содержит ведущий вал 1, ведомое звено 2, основной кривошип 3 с закрепленным на нем сателлитом 4, дополнительный кривошип с установленным с возможностью вращения сателлитом 6, имеющим эксцентричный палец 7, который шарнирно через подшипник 8 связан с ведомым звеном 2. Ведущий вал 1 идентичными кинематическими цепями, выполненными, например, в виде зубчатых передач, включгшяцих закрепленное на ведущем валу 1 зубчатое колесо 9, взаимодействующее с имеющими одинаковое число зубьев зубчатыми колесами 10 и 11, закрепленными соответственно на кривошипах.5 и 3, связан с обоими кривошипами. Сателлиты 4 ,и 6 имеют одинаковое число зубьев и находятся в постоянном зацеплении между собой, кривошипы 3 и 5 расположены взаимно параллельно в плоскости их вращения и функционируют аналогично кривошипам четырехшарнирного параллелограмма, а эксцентриситеты их равны эксцентриситету пальца 7. .
Работает механизм возвратно-поступательного движения следующим образом.
Вращение ведущего вала 1 через зубчатые колеса 9-11 передается кривошипам 3 и 5, которые при этом вращаются с одинаковыми угловыми скоростями и в одну и ту же сторону При этом сателлит 6 обкатывает сателлит 4 и в относительном движении (относительно своей оси) вращается с угловой скоростью, равной по величине и противоположной по направлению скорости вращения кривошипа 5. В результате этого эксцентричный палец 7 и связанное с ним ведомое звено 2 совершают периодическое возвратно-поступательное движение с ходом, равным величине четырех эксцентриситетов кривошипа - 46 (см.фиг. 2) .
Такое выполнение механизма обеспечивает получение его кинематической характеристики, аналогичной характеристике идеального кривошипношатунного механизма с радиусом кривошипа, равным 26. При этом величина хода возвратно-поступательного движения ведомого звена не зависит от размеров зубчатых колес, что при малых ходах ведомого звена позволяет применять зубчатые колеса с большой
0 нагрузочной способностью. Отсутствие в данном механизме присущих прототипу узлов трения способствует повышению долговечности.
15
Формула изобретения
Механизм возвратно-поступательного движения, содержсцций ведущий вал, ведомое звено, кривошип, два взаимо0действующих между собой и имеющих одинаковые числа зубьев сателлита, один из которых закреплен на кривошипе , а другой имеет шарнирно связанный с ведомым звеном эксцентрич5ный палец, эксцентриситет которого равен радиусу кривошипа, отличающийся тем, что, с целью повышения долговечности механизма, он снабжен имеющим радиус, одина-0ковый с радиусом основногокривошипа, и параллельным ему в плоскости вращения дополнительным кривошипом, на котором установлен с возможностью вращения.относительно оси сател5лит, имеющий эксцентрйчный палец, а ведущий вал идентичными кинематическими цепями связан с обоими кривошипами.
Источники информации, принятые во внимание при экспертизе
0
1.Кожевников С.И., Есипенко Я.И., Раскин Я.М. Механизмы. - М., Машиностроение, 1965, с. 287, фиг. 3.254.
2.Кожевников С.И., Есмпенко Я.И., Раскин Я.М. Механизмы. - М., Маши5ностроение, 1965, с. 670, фиг. 9.41 (прототип).
/---g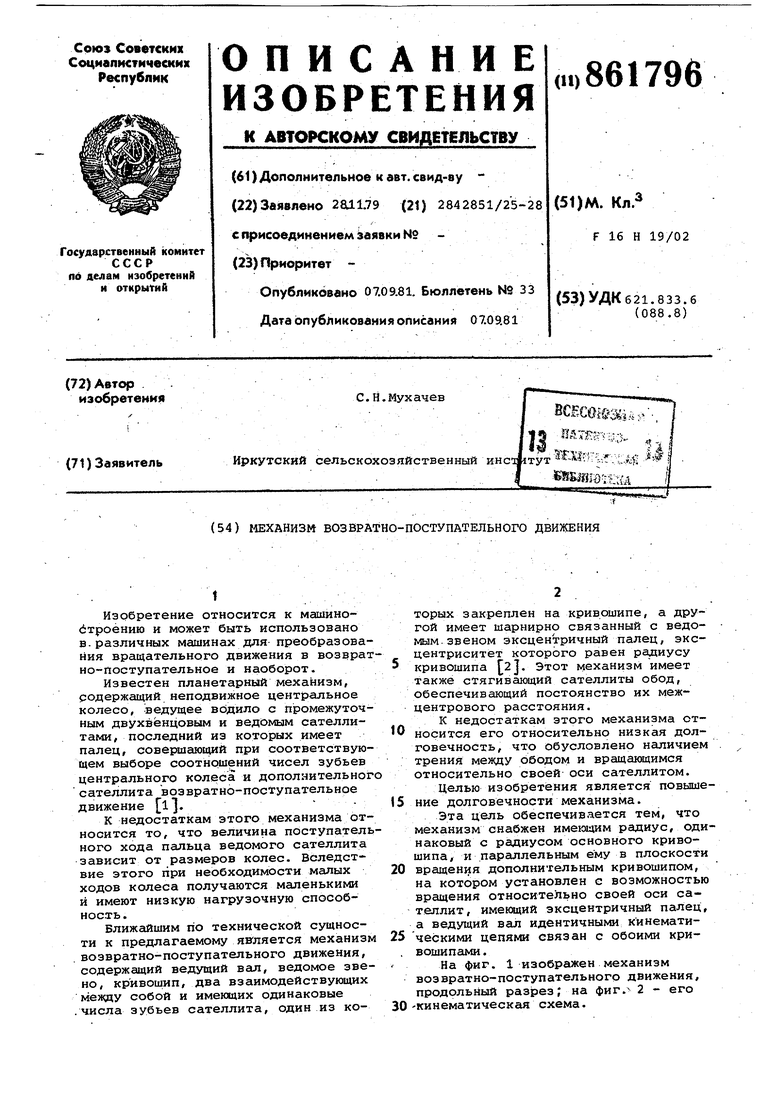
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЛАНЕТАРНЫЙ РЕДУКТОР | 1999 |
|
RU2156900C1 |
| Преобразующий зубчатый механизм | 1989 |
|
SU1726874A1 |
| ЗУБЧАТЫЙ ПЛАНЕТАРНЫЙ МЕХАНИЗМ С ПРЕРЫВИСТЫМ ДВИЖЕНИЕМ ВЕДОМОГО ЗВЕНА | 2005 |
|
RU2293234C1 |
| Устройство для преобразования возвратнопоступательного движения во вращательное и наоборот | 1974 |
|
SU587759A1 |
| Устройство для преобразования вращательного движения в возвратно-поступательное | 1979 |
|
SU911071A1 |
| ПЛАНЕТАРНАЯ ПЕРЕДАЧА С УСТРОЙСТВОМ НЕЙТРАЛИЗАЦИИ РАДИАЛЬНОЙ НАГРУЗКИ ОТ КОНТАКТИРУЮЩИХ ЗУБЬЕВ | 2017 |
|
RU2668451C1 |
| Планетарно-кривошипный механизм возвратно-поступательного движения | 1983 |
|
SU1130711A1 |
| МЕХАНИЗМ ПРИВОДА НАСОСА | 1992 |
|
RU2035616C1 |
| ПЛАНЕТАРНАЯ ПЕРЕДАЧА | 1993 |
|
RU2117835C1 |
| Рычажно-зубчатый механизм с остановками | 1987 |
|
SU1493838A1 |