(54) УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ВОЗВРАТНО-ПОСТУПАТЕЛЬНОЕ


| название | год | авторы | номер документа |
|---|---|---|---|
| Планетарно-кривошипный механизм возвратно-поступательного движения | 1983 |
|
SU1130711A1 |
| Рычажно-зубчатый механизм с остановками | 1987 |
|
SU1493838A1 |
| Приводное устройство регулируемого объемного насоса | 1984 |
|
SU1652648A1 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ ПОРШНЕЙ В ЦИЛИНДРАХ ПОРШНЕВОГО РОТОРА ВО ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ РОТОРА И ПЕРЕДАТОЧНЫЙ МЕХАНИЗМ | 2012 |
|
RU2518136C2 |
| Привод клети стана холодной прокатки труб | 1979 |
|
SU884761A1 |
| Преобразующий зубчатый механизм | 1989 |
|
SU1726874A1 |
| ЭКСЦЕНТРИКОВАЯ ПЛАНЕТАРНАЯ ПЕРЕДАЧА ВНУТРЕННЕГО ЗАЦЕПЛЕНИЯ | 2005 |
|
RU2313016C2 |
| БЕЗИНЕРЦИОННЫЙ ТРАНСФОРМАТОР ВРАЩАЮЩЕГО МОМЕНТА ШАШКИНА | 1992 |
|
RU2073805C1 |
| ОДНОКОЛЕЙНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 1993 |
|
RU2066651C1 |
| Привод арматуры | 1992 |
|
SU1807278A1 |


I
Изобретение относится к машиностроению и приборостроению и может быть использовано в датчиках, индикаторах и механизмах со строгой координацией движения, где необходимо преобразовать незначительный поворот вала в достаточно большое линейное перемещение рабочего органа, в частности для обеспечения ряда движений в манипуляторах промышленных роботов.
Известна планетарная передача с наружным зацеплением для осуществления прямолинейного движения, содержащая центральное неподвижное колесо, сателлит, диаметр которого вдвое меньше диаметра центрального колеса и который зацепляется с последним через паразитное колесо. С сателлитом жестко связан кривошип, который в свою очередь шарнирно связан с ведомым звеном {1 .
Недостатком зтой конструкции являются сравнительно большие поперечные габариты, составляющие сумму половины хода ведомого звена и диаметра сателлита.
Наиболее близким к изобретению является устройство для преобразования врагиатель
ного движения в возвратно-поступательное, содержащее корпус, расположенный в нем на подшипниках кривошипный вал, установленный на валу сателлит, взаимодействующее с последним и закрепленное в корпусе центральное колесо с внутренними зубьями, диаметр, которого вдвое больше диаметра сателлита, и ведомое звено, кинематически связанное с сателлитом {2.
Однако в каждом устройстве кинематичесtoкая связь осуществлена шарнирной парой, что обуславливает небольшой ход ведомого звена, вдвое превышающий диаметра сателлита.
Целью изобретения является увеличение
IS хода ведомого звена.
Поставленная цель достигается тем, что сателлит выполнен двухвенцовым, а кинематическая связь ведомого звена с сателлитом в виде, по крайней мере, одного взаимодей20ствующего со вторым венцом сателлита зубчатого колеса и шарнирно связанного с осью последнего рычага, закрепленного на са теллите.
39
Для изменения направления ведомого звена центральное колесо может быть установлено с возможностью фиксированного поворота относительно корпуса.
Кроме того, для повышения нагрузочной способности устройство может быть снабжено дополнительными аналогичными основным кривошипным валом, кинематически связанным с основным, расположенным на нем двувенцовым сателлитом, взаимодействующим с ним центральным колесом с внутренними зубьями, закрепленными в корпусе, по крайней мере, одним, взаимодействующим со вторым венцом сателлита и ведомым звеном, зубчатым колесом и рычагом шарнирно связанным с осью последнего и жестко-с сателлитом.
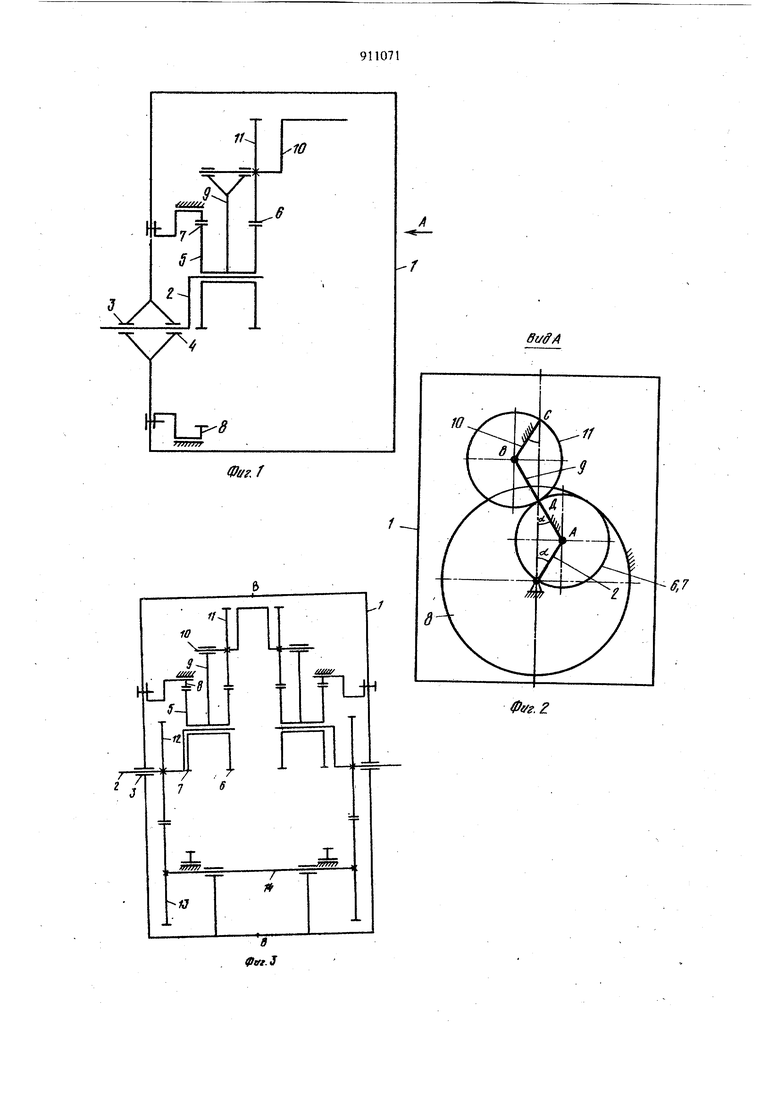
На фиг. 1 изображена кинематическая схема устройства с одним рычагом и зубчатым колесом; на фиг. 2 - вид А на фиг.1; на фиг. 3 - кинематическая схема устройства повышенной нагрузочной способности; на фиг. 4 - кинематическая схема с двумя рычагами и зубчатыми колесами; на фиг. 5кинематическая схема с неравными диаметрамй вендов сателлитов; на фиг. 6 - вид Б на фиг. 5; на фиг. 7 - кинематическая схема устройства с двумя неравными между собой длинами рычагов.
Устройство для преобразования вращательного движения в возвратно-поступательное содержит (фиг. 1 и 2) корпус 1, в котором установлен кривошипный вал 2, опирающийся на подшипники 3 и 4. На валу 2 устновлен сателлит 5 с двумя одинаковыми венцами 6 и 7. Венец 7 взаимодействует с централььп 1М колесом 8 с внутренними, зубьями, закрепленным в корпусе 1 с возможностью фиксированного поворота. При зтом радиус шейки кривошипного вала 2 равен радиусу венцов 6 и 7, а радиус центрального колеса 8 вдвое превышает его. На сателлите 5 между венцами 6 и 7 закреплен рычаг 9, несущий на конце подшипниковые опоры, в которых установлено ведомое звено 10, выполненное в виде кривошипного вала, аналогичного валу 2. На звене 10 закреплено зубчатое колесо 11, зацепляющееся с венцом 6 сателлита.
Устройство с повышенной нагр)гзочной способностью (фиг. 3) имеет левую и правую кинематические цепи, симметричные относительно сечения ВВ. При зтом их ведомые звенья 10 жестко связаны друг с другом. Для синхронизации вращения левый и правый кривошипные валы 2 кинематически связаны между собой посредством двух зубчатых колес 12, закрепленных на кривошипЖ4Х валах 2 и зацепляющихся с ними колес 13, установленных в корпусе 1 на оси J4, таким образом, чтобы последняя находилась за пределами траектории движения ведомого звена 10.
Для обеспечения еще большего хода ведомого звена 10 в кинематическую связь последнего с сателлитом 5 введен второй рыча 15 с закрепленными на нем колесом 16, зацепляющимся с колесом 11 и венцом 6 сателлита 5 (фиг. 4). Начальные диаметры колес 11 и 16, а также венцов 6 и 7 сателлита 5 равны между собой. Длины рычагов 9 и 15 равны диаметрам колес и диамеру траектории движения шейки кривощипного вала 2. Устройство по фиг. 4 также мжет быть выполнено симметричным, аналогичным устройству по фиг. 3. Длина рычагов
9и 15 могут быть отличными от диаметра траектории щейки вала 2 и неравными между собой (фиг. 5-7). Диаметр зубчатого венца 6 сателлита 5 больше диаметра венца 7 и равен диаметру зубчатого колеса 11 (фиг. 5 и 6). Соответствзнно увеличивается и длина рычага 9. В устройстве, представленном на фиг. 7, по сравнению с устрой ством на фиг. 4 увеличен диаметр венца 6, а на рычаге 15 закреплено второе зубчатое колесо 17, зацепляющееся с колесом 11 также большего диаметра.
Для всех устройств центральное колесо 8 установлено с возможностью поворота в корпусе 1 с последующей фиксацией.
Устройство работает следующим образом.
При вращении вала 2 сателлит 5 будет обкатываться по центральному колесу 8. Выбором диаметров колес обеспечивается (см. фиг. 2) постоянное равенство треугольников ОАД и две. Точка С (ось кривошипа ведомого звена 10 (и точка Д половина длины рычага 9) постоянно находятся в плоскости В-В, проходящей через ось вала 2, т.е. совершают возвратно-поступательное движение. При выполнении устройства по фиг. 3 правая и левая симметричные цепи работают аналогично. Синхронный поворот валов 2 и отсутствие перекосов в устройстве обеспечивается кинематической связью валов 2. Повышение нагрузочной способности устройства достигается раздвоением потока мощности и переходом от консольного расположенного ведомого звена 10 к двухопорному. В устройстве по фиг. 4 вал 2 и рычаг 15 вращаются в одну сторону с одинаковой угловой скоростью, а рычаг 9 и ведомое звено
10имеет ту же скорость по величине, но обратного направления. В результате сложения угловых скоростей возникает возвратнопоступательное движение оси кривошипа ведомого звена 10. При повороте центрального
колеса 8 ось кривошипа ведомого звена 10 будет совершать движение в другом направлении.
В устройстве по фиг. 5 и 6 габариты звеньев обеспечивают постоянное подобие рав нобедренных треугольников О АД и ДВС, в результате чего точка С (ось кривошипа ведомого звена 10) постоянно находится в плоскости В-В, т.е. совершает возвратнопоступательное движение. Устройство по фиг. 7 работает аналогично устройству по фиг. 4.
Таким образом, увеличение хода ведомого звена 10 достигается установкой рычагов и зубчатых колес. В устройстве по фиг. 4 ход S ведомого звена 10
S 4г(п+1),
где г - радиус венца 7 сателлита 5; п - число рычагов 9. При установке рычагов разной длины (И) ход ведомого звена равен
S 2(г +se.+rn),, .
где г,, - радиус кривошипной окружности
ведомого звена 10,
Использование данного устройства позволяет значительно увеличить ход ведомого звена при достаточно точной координации, поступательного перемещения ведомого звена 10 и вращательного движения вала 2.
Формула изобретения
ющее с последним и установленное в корпусе центральное колесо с внутренними зубьями, днаметр которого вдвое больше диаметра сателлита, и ведомое звено, кинематически 5 связанное с сателлитом, отличающееся тем, что, с целью увеличения хода ведомого звена, сателлит выполнен двухвен.довым, а кинематическая связь - в виде, по крайней мере, одного взаимодействующего to I со вторым венцом сателлита зубчатого колеi са и щарнирно связанного с осью цьследнеi го рычага, закрепленного на сателлите.
IS направления движения ведомого звена, централыгае колесо установлено с возможностью фиксированного поворота относительно корпуса.
нагрузочной способности, устройство снабжено дополнительными аналогичными основным кривошипным валом, кинематически связанным с основным, расположенным на нем
25 двухвенцовым сателлитом, зацепляющимся с ним центральным колесом с внутренними зубьями, закрепленным в корпусе, по крайней мере, одним взаимодействующим со вторым венцом сателлита и ведомым звеном,
- зубчатым колесом и рычагом, щарнирно связанным с осью последнего и жестко - с сателлитом.
Источники информации, принятые во внимание при зкспертизе
35 М., Мащиностроение, 1976, с. 548, рис. 9.29.
Фа./
ff
fljH
Фуг.г
7S
X
I -ЛУУ
a
фуг. л
11-
,v
ш
. I
X.AЛ///
flJ-
//лx
IF
/y/yyy
