1
V.
Изобретение относится к маиипуля- торо- и роботостроению и может быть использовано также в точных следшцих приводах летательных аппаратов.
Известны устройства с выбором люфта в кинематической ;цепи посредством применения упругих элементов типа цепей, .пружин, торсионных, валов, гидроцилиндров и т.п. 1
Такие устройства имеют низкий КПД из-аа роста сил трения в люфтовыбиракядем механизме, кото,рое нагружено рабочим усилием устройства, обладают малой надежностью упругих элементов и жесткостью устройства в целом.
Наиболее близким по технической сущности к предлагаемому является приводное устройств.о, содержащее двигатель, входное и выходное звенья шарнира и связывающий их дифференцигшьный механизм Г2 . .
Выбор люфтов в нем осуществляется за счет соединения кинемаТичеЬких цепей двух степеней подвижности манипулятора, что усложняет устройство. Кроме того, приводное устройство обладает сравнительно мгшой-жесткостью и несущей способностью из-за нгшичия конических передач и длинных валов.
Цель изобретения - упрощение выборкн зазоров в кинематической цепи и повьаление жесткости последней.
Поставленная цель достигается тем, 5 что дифференциальный механизм выполнен замкнутым с циркуляцией мощности.
В качестве варианта изготовления дифферйенциальный механизм образован
to двумя дифференциальными ступенями, выходная ступень которого включает три центральных колеса, одно из которых, с наружными зубьями, жестко связано с водилом входной ступени, второе, с внутренними зубьями, связано с выходным звеном шарнира с возможг ностью смещения относительно него в двух взаимно перпенднкулярных направлениях, третье, с внутренними зубьями, имеет два зубчатых венца, беговые дорожки на внутренней стороне обода и связано жестко с центральным колесом с внутренними зубьями входной ступени и выходным звеном шарнира, а
25 сателлиты зтой ступени выполнены с тремя зубчатыми венцами и беговыми дорожками, взаимодействующими соответственно с зубчатыми венцами центральных колес и беговыми дорожками
30 центрального колеса.
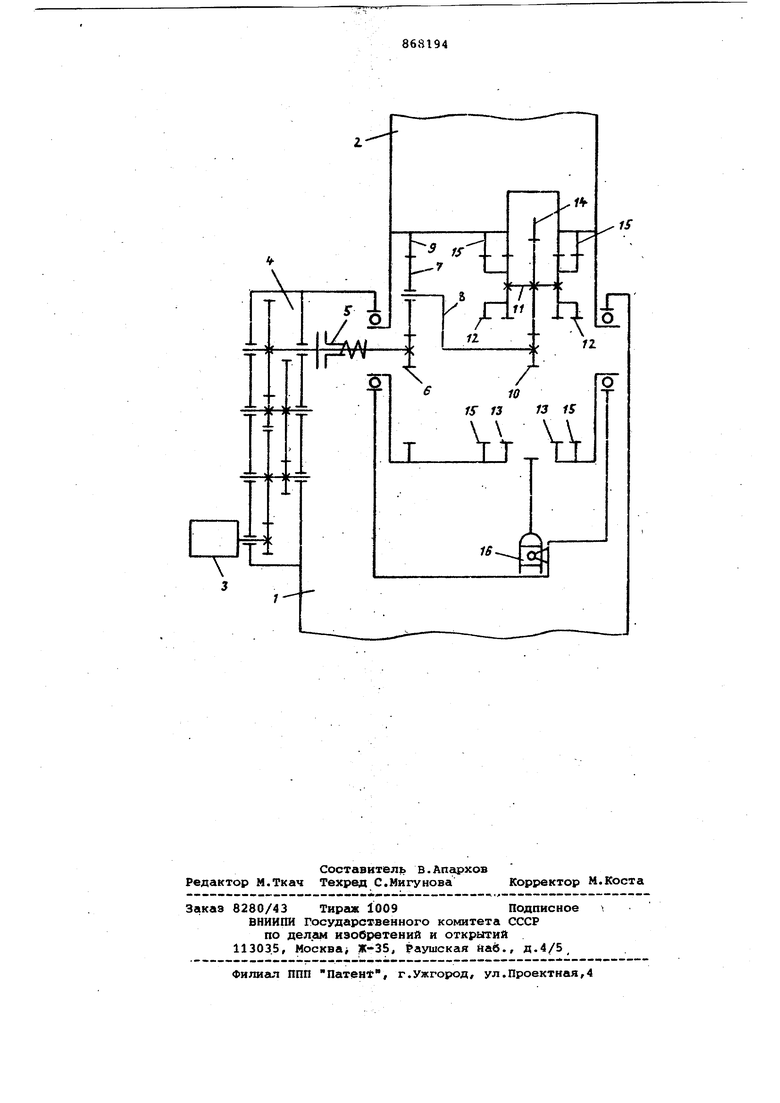
На чертеже изображено предлагаемое устройство, продольный разрез,
Приводное устройство манипулятора соединяет между собой входное 1 и выходное 2 звенья шарнира и помимо них содержит двигатель 3, цилиндрический редуктор 4, соединенный предохранительной муфтой 5 с дифференциальным механизмом, который выполнен двухступенчатым замкнутым с циркуляцией мощности. Входная ступень дифференциального механизма содержит центргьльное колесо б с наружными зубьями, сателлиты 7,водило 8 и центральное колесо 9 с внутренними зубьями. Выходная ступень содержит центральное колесо 10 с наружными зубьями, зацепляющиеся с ним трехвенцовые сателлиты 11, снабженные беговыми дорожками 12, и два центральных колеса 13 и 14 с внутренними зубьями..
Центральное колесо 10 жестко связано с водилом 8 входной ступени и выполнено плавающим, центральное колесо 13 имеет двй зубчатых венца и две беговые дорожки 15, взаимодействующие соответственно с зубчатыми венцами и беговыми дорожками 12 сателлита 11. Колесо 13 жестко связано с центральным колесом 9 входной ступени и с выходным звеном 2 шарнира манипулятора.
Центральное колесо 14 установлено в выходном звене 2 шарнира с возможностью смещения относительно него в двух взаимно перпендикулярных направлениях, например, с помощью кулисы 16.
Приводное устройство манипулятора работает следукадим образом.
Поток мощности от двигателя 3 проходит через цилиндрический редуктор 4 и поступает к центральному колесу 6 входной ступени дифференциального механизма. Числа зубьев и знаки передаточных чисел в последнем подобраны таким образом, чтобы создать в нем циркуляцию мощности по замкнутому контуру. При этом часть потока проходит через выходную ступень и приводи в движение выходное звено 2 шарнира, а другая его часть обеспечивает подтормаживание движения звеньев дифференциального механизма. Усилия в зацеплениях входной ступени существенно меньше усилий в выходной ступени. Моменты.сил, приложенные к венцам 9 и 13, направлены в разные стороны, а их разность остается постоянной в процессе перемещения звена 2. Путем подбора передаточных отношений с±упеней можно создать любое люфтовыбирающее усилие в пределах мощности двигателя. Поскольку величина циркулирующей мощности невелика, то КПД передачи остается высоким.
Жесткость приводного устройства достаточно высока, поскольку в наиболее нагруженной выходной ступени использованы колеса с многопарными зацеплениями и с равномерным распределением нагрузки в зацеплениях.
Технико-экономический эффект предлагаемого приводного устройства манипулятора обеспечивается комплексом высоких технических характеристик: минимальный люфт привода для точного выхода исполнительного органа в заданное положение, высокие КПД и надежность, малый вес.
Формула изобретения
1.Приводное устройство манипулятора, содержащее двигатель, входное и выходное звенья шарнира и связывающий их дифференциальный механизм, отличающееся тем, что,
с целью упрощения выборки.зазоров в кинематической цепи, повышения ее жесткости, дифференциальный механизм выполнен замкнутым с циркуляцией мсяцности.
2.Устройство по П.1, отличающееся тем, что дифференциальный механизм образован двумя дифференциальными ступенями, выходная ступень которого включает три центральных колеса, одно из которых с наружньши зубьями, жестко связано с водилом входной ступени, второе,
с внутренними зубьями, связано с выходным звеном шарнира с возможностью смещения относительно него в двухвзаимно перпендикулярных направлениях, третье, с внутренними зубьями, имеет два зубчатых венца, беговые дорожки на внутренней стороне обода и связано жестко с центральным колесом с внутренними зубьями входной ступени и выходным звеном шарнира, а сателлиты этой ступени выполнены с тремя зубчатыми венцами и беговыми дорожками, взаимодействующими соответственно с зубчатыми венцами центральных колес и беговыми дорожками центрсшьного колеса.
Источники информации, принятые во внимание при экспертизе
1.Белянин П.Н. Промышленные роботы. М., Машиностроение, 1971, с.179190.
2.Йвторское свидетельство СССР
303463, кл.Р 16 H-i/28, 1969 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Планетарный механизм и планетарная передача на его основе | 2018 |
|
RU2677952C1 |
| ПЛАНЕТАРНЫЙ МЕХАНИЗМ | 2013 |
|
RU2539438C1 |
| Планетарная передача с предварительной ступенью | 2022 |
|
RU2782006C1 |
| ПЛАНЕТАРНАЯ ЗУБЧАТАЯ ПЕРЕДАЧА | 2023 |
|
RU2813377C1 |
| Шарнир манипулятора | 1987 |
|
SU1516350A1 |
| Привод манипулятора | 1982 |
|
SU1144877A1 |
| ЭКСЦЕНТРИКОВАЯ ПЛАНЕТАРНАЯ ПЕРЕДАЧА ВНУТРЕННЕГО ЗАЦЕПЛЕНИЯ | 2005 |
|
RU2313016C2 |
| ПЛАНЕТАРНЫЙ ЦИКЛОИДАЛЬНЫЙ РЕДУКТОР С ПРЕДВАРИТЕЛЬНОЙ СТУПЕНЬЮ | 2012 |
|
RU2506477C1 |
| ВЫСОКОМОМЕНТНЫЙ ДИФФЕРЕНЦИАЛЬНЫЙ ГИДРОМЕХАНИЧЕСКИЙ ВАРИАТОР | 2007 |
|
RU2347966C1 |
| ДВУХСТУПЕНЧАТАЯ ПЛАНЕТАРНАЯ ПЕРЕДАЧА | 2008 |
|
RU2402707C2 |