Изобретение относится к обш,ему машиностроению, а именно к промышленным роботам и манипуляторам.
Цель изобретения - повышение дол- говечности и надежности за счет рационального распределения нагрузок.
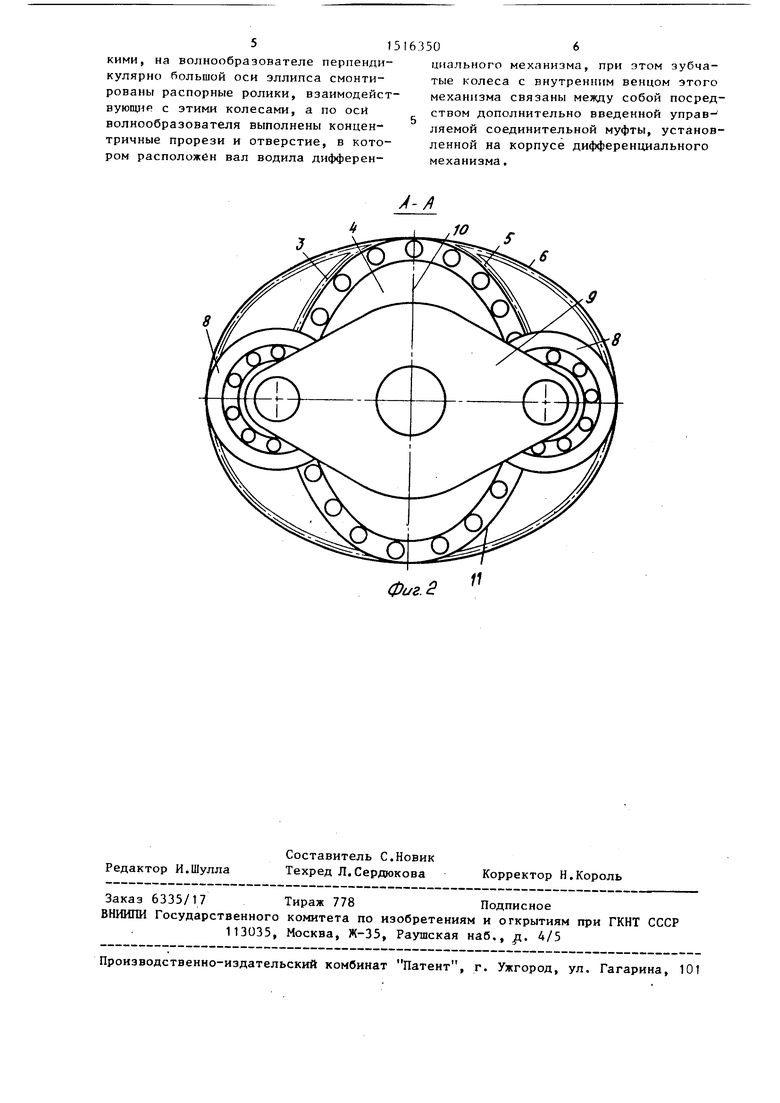
На фнг.1 показана схема привода шарнира; на фиг.2 - сечение А-А на фиг.1,
Шарнир манипулятора содержит звено 1 и второе звено с выходным валом 2, волновую зубчатую передачу 3 с волнообразователем 4 и двухвенцовым зубчатым колесом 5. Оно зацеплено с двумя одновенцовыми зубчатыми колесами 6 и 7. Колесо 6 закреплено неподвижно на звене 1, а колесо 7 кинематически соединено с выходным валом 2 второго звена шарнира.
Оба наружные зубчатые колеса 6 и 7 волновой передачи 3 выполнены гибкими и внутри них установлены распорные ролики 8, смонтированные на рычагах 9. Последние закреплены на вол нообразователе 4 перпендикулярно
большой оси 10 его эллипса 11.
Волнообразователь 4 снабжен концентричными прорезями 12 и отверстием, которым он соединен с води- лом 13 двухсателлитного дифференциального механизма )4, Его оба центральные зубчатые колеса 15 закреплены на валу двигателя, а сателлиты 16 упруго соединены между собой валом 17 с прорезями 18. Каждый из сателлитов 16 сцеплен с зубчатым колесом 19 и 20, имеюацчм внутренний венец, они связаны г управляемой соединительной муфтом 21 для их дальнейшего попеременного соединения с водилом 13. Электродвигатель 22 через муфту 23 соединен с валом и далее с колесами 15.
Для уменьшения изгибно-крутильных напряжений гибких зубчатых колес 6 и 7 колесо 6 соединено с корпусом 24 зубчатой муфтой 25, а колесо 7 - с выходньач валом 2 зубчатой муфтой 26.
Шарнир манипулятора работает еле- дующим образом.
От электродвигателя 22 через муфт 23 вращение сообщается валу, который приводит во вращение сателлиты 16 дифференциального механизма 14. Дале возможны два варианта работы.
Первый вариант. Управляемая соединительная муфта 21 связывает колесо
19с водилом 13 дифференциального механизма 14, а колесо 20 вращается свободно. Далее движение передается волнообразователю 4, деформирующему двухвенцовое гибкое зубчатое колесо 5, от него - зубчатому колесу 7 (второе зубчатое колесо 6 свободно), а через муфту 26 - выходному валу 2 второго звена шарнира.
Второй вариант. Управляемая соединительная муфта 21 связывает колесо
20с водилом 13 дифференциального механизма 14, а колесо 19 вращается свободно„ Затем остальные звенья работают как и в первом варианте.
Так как комбинация чисел зубьев у колес 19 и 20 по первому и второму вариантам работы разные, то и передаточные отношения разные.
Наличие прорезей 12 на волнообра- зователе 4 и прорезей 18 на валу 17 сателлитов обеспечивает самоустановк по длине всех зацепляюш 1хся зубьев. Расположение распорных роликов 8 внутри зубчатых колес 6 и 7 значительно уменьшает габариты привода. Выполнение наружных зубчатых колес 6 и 7 гибкими позволяет перераспределить на них часть деформации с двух венцового гибкого колеса 5 и тем повысить долговечность и надежность привода в целом. Формула изобретения
Шарнир манипулятора, содержащий два звена, первое из которых связано с приводом, имеющим двигатель, выходной вал которого связан с волновой зубчатой передачей, имеющей Волнообразователь в виде эллипса, и двухвенцовое гибкое зубчатое колесо, находящееся в зацеплении с двумя од- новенцовь1ми зубчатыми колесами, одно из которых жестко связано с первым звеном, а второе кинематически связано с вторым звеном, отличающийся тем, что, с целью повышения долговечности и надежности за счет рационального распределения нагрузок, он снабжен дифференгщальным механизмом, имеющим корпус, два зубчатых колеса с внутренним венцом, сателлиты, упруго связанные между собой, и два центральных зубчатых колеса, жестко связанных между собой и с выходным валом двигателя, при этом в волновой зубчатой передаче одновен- цовые зубчатые колеса выполнены гибкими, на волнообразователе перпендикулярно большой оси эллипса смонтированы распорные ролики, взаимодейст- вуюпц1е с этими колесами, а по оси волнообразователя выполнены концентричные прорези и отверстие, в котором расположен вал водила дифференциального механизма, при этом зубчатые колеса с внутренним венцом этого механизма связаны между собой посредством дополнительно введенной управляемой соединительной муфты, установленной на корпусе дифференциального механизма,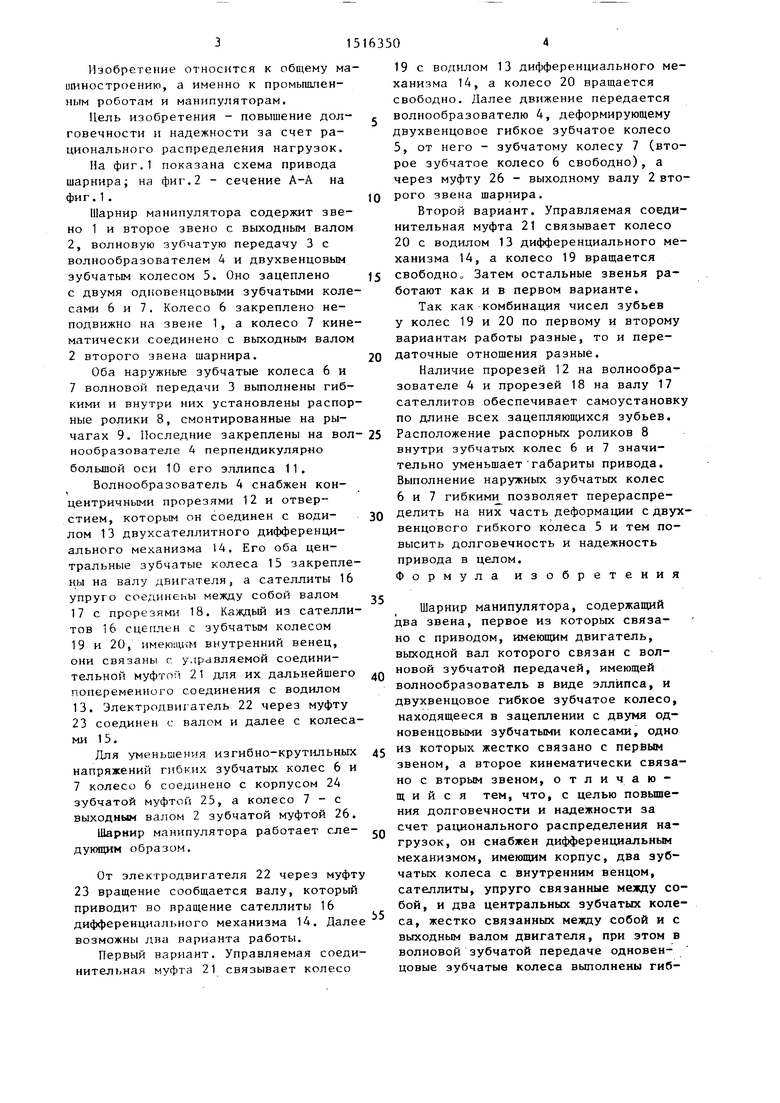
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1980 |
|
SU891425A1 |
| Модуль манипулятора | 1985 |
|
SU1268411A1 |
| ШАРНИР МАНИПУЛЯТОРА С РЕГУЛИРУЕМОЙ БЕЗЗАЗОРНОЙ ЗУБЧАТОЙ ПЕРЕДАЧЕЙ (ВАРИАНТЫ) | 2012 |
|
RU2497658C1 |
| ВОЛНОВОЙ МЕХАНИЗМ | 2007 |
|
RU2349811C1 |
| Модуль манипулятора | 1985 |
|
SU1321584A1 |
| Шарнир манипулятора Воробьева | 1984 |
|
SU1204375A1 |
| ДИФФЕРЕНЦИАЛЬНЫЙ ВСТРАИВАЕМЫЙ ЗУБЧАТЫЙ МЕХАНИЗМ ПРЕОБРАЗОВАНИЯ КРУТЯЩЕГО МОМЕНТА, ПРЕОБРАЗОВАТЕЛЬ КРУТЯЩЕГО МОМЕНТА И ПЕРЕДАТОЧНОГО ОТНОШЕНИЯ | 2012 |
|
RU2510696C2 |
| Манипулятор | 1987 |
|
SU1465300A1 |
| Манипулятор для передачи изделий | 2023 |
|
RU2822908C1 |
| Манипулятор А.И. полетучего | 1985 |
|
SU1247262A1 |
Изобретение относится к общему машиностроению, а именно к промышленным роботам и манипуляторам. Целью изобретения является повышение долговечности и надежности за счет рационального распределения нагрузок. При вращении вала от двигателя 22 вращение передается на сателлиты 16. Управляемая муфта 21 останавливает либо колесо 20, либо колесо 19, что определяет планетарное движение сателлитов 16 и соответственно вращение водила 13 с определенной скоростью, т.к. число зубьев колес 19 и 20 различно. При вращении водила 13 вращается волнообразователь 4, вследствие чего происходит поворот выходного вала 2 второго звена шарнира со скоростью, определяемой передаточным отношением между колесами 19 и 20 и сателлитами 16. 2 ил.
фиг. 2
| Андре П | |||
| и др | |||
| Конструирование роботов | |||
| - М.: Мир, 1986, с.225, рис.6,15. |
