10 16 / / 13 1J / /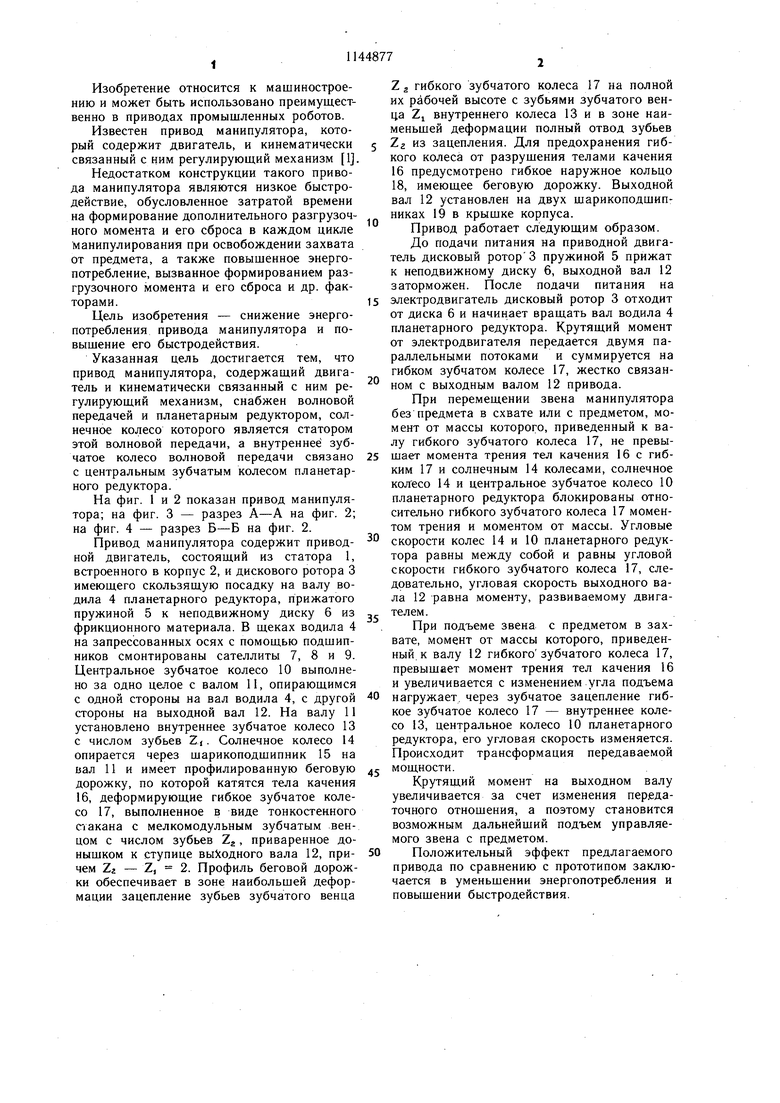
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод канатно-угольной пилы | 1984 |
|
SU1191577A1 |
| Электропривод | 2021 |
|
RU2771503C1 |
| Манипулятор | 1987 |
|
SU1465300A1 |
| КОМБИНИРОВАННЫЙ ПРИВОД ИСПОЛНИТЕЛЬНОГО МЕХАНИЗМА ОТ ЭЛЕКТРОДВИГАТЕЛЯ И/ИЛИ ОТ РУЧНОГО УСИЛИЯ (ВАРИАНТЫ) | 2002 |
|
RU2226633C1 |
| Планетарный прецессионный редуктор | 1991 |
|
SU1825914A1 |
| Электромеханический привод | 2018 |
|
RU2722890C2 |
| Гайковерт | 1989 |
|
SU1705060A1 |
| ЭКСЦЕНТРИКОВАЯ ПЛАНЕТАРНАЯ ПЕРЕДАЧА ВНУТРЕННЕГО ЗАЦЕПЛЕНИЯ | 2005 |
|
RU2313016C2 |
| Очувствленный схват манипулятора | 1982 |
|
SU1134361A1 |
| БЕЗВОДИЛЬНЫЙ ПЛАНЕТАРНЫЙ РЕДУКТОР | 2012 |
|
RU2511749C1 |

ПРИВОД МАНИПУЛЯТОРА, содержащий двигатель и кинематически связанный с ним регулирующий механизм, отличающийся тем, что, с целью снижения энергопотребления привода и повышения быстродействия, он снабжен волновой передачей и планетарным редуктором, солнечное колесо которого является статором этой волновой передачи, а внутреннее зубчатое колесо волновой передачи связано с центральным зубчатым колесом планетарного редуктора.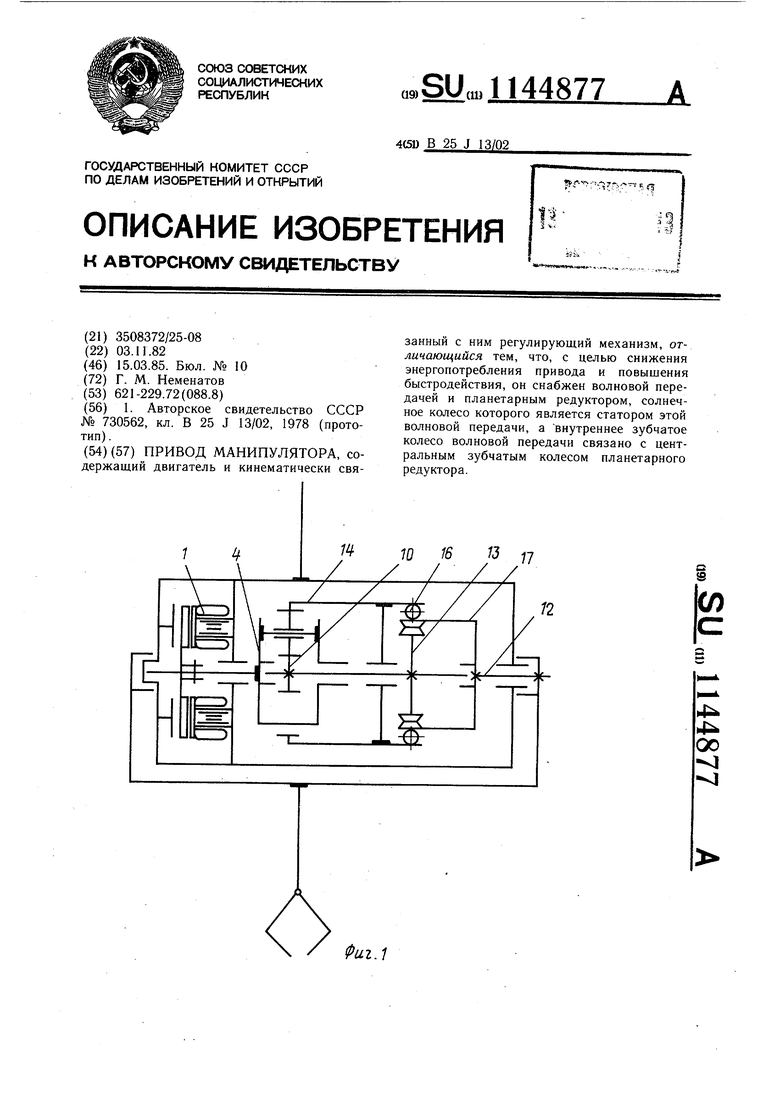
Фаг Л
Изобретение относится к машиностроению и может быть использовано преимущественно в приводах промышленных роботов.
Известен привод манипулятора, который содержит двигатель, и кинематически связанный с ним регулирующий механизм 1J
Недостатком конструкции такого привода манипулятора являются низкое быстродействие, обусловленное затратой времени на формирование дополнительного разгрузочного момента и его сброса в каждом цикле манипулирования при освобождении захвата от предмета, а также повышенное энергопотребление, вызванное формированием разгрузочного момента и его сброса и др. факторами.
Цель изобретения - снижение энергопотребления привода манипулятора и повышение его быстродействия.
Указанная цель достигается тем, что привод манипулятора, содержащий двигатель и кинематически связанный с ним регулирующий механизм, снабжен волновой передачей и планетарным редуктором, солнечное колесо которого является статором этой волновой передачи, а внутреннее зубчатое колесо волновой передачи связано с центральным зубчатым колесом планетарного редуктора.
На фиг. 1 и 2 показан привод манипулятора; на фиг. 3 - разрез А-А на фиг. 2; на фиг. 4 - разрез Б-Б на фиг. 2.
Привод манипулятора содержит приводной двигатель, состоящий из статора 1, встроенного в корпус 2, и дискового ротора 3 имеющего скользящую посадку на валу водила 4 планетарного редуктора, прижатого пружиной 5 к неподвижному диску б из фрикционного материала. В щеках водила 4 на запрессованных осях с помощью подшипников смонтированы сателлиты 7, 8 и 9. Центральное зубчатое колесо 10 выполнено за одно целое с валом 11, опирающимся с одной стороны на вал водила 4, с другой стороны на выходной вал 12. На валу 11 установлено внутреннее зубчатое колесо 13 с числом зубьев Z(. Солнечное колесо 14 опирается через шарикоподшипник 15 на вал 11 и имеет профилированную беговую дорожку, по которой катятся тела качения 16, деформирующие гибкое зубчатое колесо 17, выполненное в виде тонкостенного стакана с мелкомодульным зубчатым венцом с числом зубьев Zg, приваренное донышком к ступице выгодного вала 12, причем 2г - Z, 2. Профиль беговой дорожки обеспечивает в зоне наибольшей деформации зацепление зубьев зубчатого венца
Zg гибкого зубчатого колеса 17 на полной их рабочей высоте с зубьями зубчатого венца Zi внутреннего колеса 13 и в зоне наименьшей деформации полный отвод зубьев 5 Ъг. из зацепления. Для предохранения гибкого колеса от разрушения телами качения 16 предусмотрено гибкое наружное кольцо 18, имеющее беговую дорожку. Выходной вал 12 установлен на двух шарикоподшипниках 19 в крышке корпуса.
Привод работает следующим образом. До подачи питания на приводной двигатель дисковый ротор 3 пружиной 5 прижат к неподвижному диску 6, выходной вал 12 заторможен. После подачи питания на
5 электродвигатель дисковый ротор 3 отходит от диска 6 и начинает вращать вал водила 4 планетарного редуктора. Крутящий момент от электродвигателя передается двумя параллельными потоками и суммируется на гибком зубчатом колесе 17, жестко связан ном с выходным валом 12 привода.
При перемещении звена манипулятора без предмета в схвате или с предметом, момент от массы которого, приведенный к валу гибкого зубчатого колеса 17, не превышает момента трения тел качения 16 с гибким 17 и солнечным 14 колесами, солнечное 14 и центральное зубчатое колесо 10 планетарного редуктора блокированы относительно гибкого зубчатого колеса 17 моментом трения и моментом от массы. Угловые
скорости колес 14 и 10 планетарного редуктора равны между собой и равны угловой скорости гибкого зубчатого колеса 17, следовательно, угловая скорость выходного вала 12 равна моменту, развиваемому двига телем.
При подъеме звена с предметом в захвате, момент от массы которого, приведенный к валу 12 гибкогозубчатого колеса 17, превыщает момент трения тел качения 16 и увеличивается с изменением угла подъема
0 нагружает, через зубчатое зацепление гибкое зубчатое колесо 17 - внутреннее колесо 13, центральное колесо 10 планетарного редуктора, его угловая скорость изменяется. Происходит трансформация передаваемой
мощности.
Крутящий момент на выходном валу увеличивается за счет изменения пер.едаточного отношения, а поэтому становится возможным дальнейший подъем управляемого звена с предметом.
Положительный эффект предлагаемого привода по сравнению с прототипом заключается в уменьшении энергопотребления и повышении быстродействия.
7 щ 15
W
т
Фаг.З
Ц
%2.2 16 18 17 13 II /
16
П
Риг.Ц
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Привод манипулятора | 1978 |
|
SU730562A2 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Чугунный экономайзер с вертикально-расположенными трубами с поперечными ребрами | 1911 |
|
SU1978A1 |
