(54) ЛЕНТОПРОТЯЖНЫЙ МЕХАНИЗМ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления лентопро-ТяжНыМ МЕХАНизМОМ | 1979 |
|
SU847357A1 |
| Аппарат магнитной записи | 1979 |
|
SU909697A1 |
| Устройство для управления лентопротяжным механизмом | 1981 |
|
SU953663A1 |
| Устройство для индикации количества магнитной ленты | 1985 |
|
SU1304074A1 |
| Устройство хронирования магнитной записи | 1980 |
|
SU940231A1 |
| Лентопротяжный механизм кассетного магнитофона | 1982 |
|
SU1297108A1 |
| Устройство для магнитной записи | 1979 |
|
SU847348A1 |
| Устройство магнитной записи | 1983 |
|
SU1078466A1 |
| Устройство для контроля работы лентопротяжного механизма аппарата магнитной записи | 1979 |
|
SU877611A1 |
| Устройство для управления лентопротяжным механизмом | 1982 |
|
SU1046769A1 |
I
Изобретение относится к приборостроению, а именно к технике магнитной записи, и может быть использовано в аппаратах магнитной записи, в которых необходимы точное регулирование скорости перемотки в обоих направлениях, форсированный пуск и мягкое торможение магнитной ленты.
Известен лентопротяжный механизм, содержащий два боковых узла, каждый из которых включает в себя электродвигатель и катушку для магнитной ленты, и блок управления, выходы которого подключены к коммутатору режимов перемотки , выполненному на. электромагнитных реле, что обеспечивает при выключении ускоренной перемотки магнитной ленты быструю синхронную остановку боковых узлов и, следовательно, магнитной ленты без образования петель и растяжения последней tl3
Нёдостат.ком известного устройст... является то, что не обеспечивается высокая стабильность натяжения магнитной ленты по всей длине ленты и достаточная равномерность скорости перемотки полного рулона магнитной
понхы.
Наиболее близким к предлагаемому является аппарат магнитной записи, содержащий лентопротяжный механизм с боковыми узлами, электродвигатели которых подключены к выходам уси-. лительно-преобразовательных блоков, двумя датчиками натяжения и датчиком скорости, подключенным к входу блока формирования сигнала остановки
10 ленты, связанному выходом с блоком управления, первый выход которого соединен с управляющим входом коммутатора, а второй и третий выходы блока управления связаны через ком15мутатор с управляющими входами упомянутых усилительно-преобразовательных блоков . .
Недостатком известного устройства является неравномерность скорости
20 ускоренной перемотки магнитной ленты в обоих направлениях. Большая неравномерность скорости перемотки обусловлена тем, что от начала и до конца полной перемотки рулона
25 магнитной ленты значительно возрастает момент нагрузки электродвигателя приемного узла и соответственно уменьшается момент нагрузки электродвигателя подающего узла. В результате происходит замедление движения
30
магнитной ленты без существенного изменения величины стабилизируемого ее натяжения. При этом в конце перемотки полного рулона ленты происходит уменьшение скорости на 30-50%.
Цель изобретения - повышение равномерности скорости движения носителя при перемотке.
Поставленная цель достигается тем, что в лентопротяжный механизм введены два переключателя датчиков, две схемы запрета и блок формирования сигнала скорости движения ленты, вход которого соединен с выходом датчика скорости движения ленты, а выход - с первыми сигнальными входами пере-ключателей датчиков , вторые сигнальные входы которых подключены к въ ходам датчиков натяжения ленты, при этом управляющие входы переключателей датчиков соединены с .выходами схем запрета, а их выходы - с сигнальными входами усилителей-преобразователей, первые входы упомянутых схем запрета соединены меиоду собой и с первым выходом блока управления а вторые - с соответствующими выходами коммутатора.
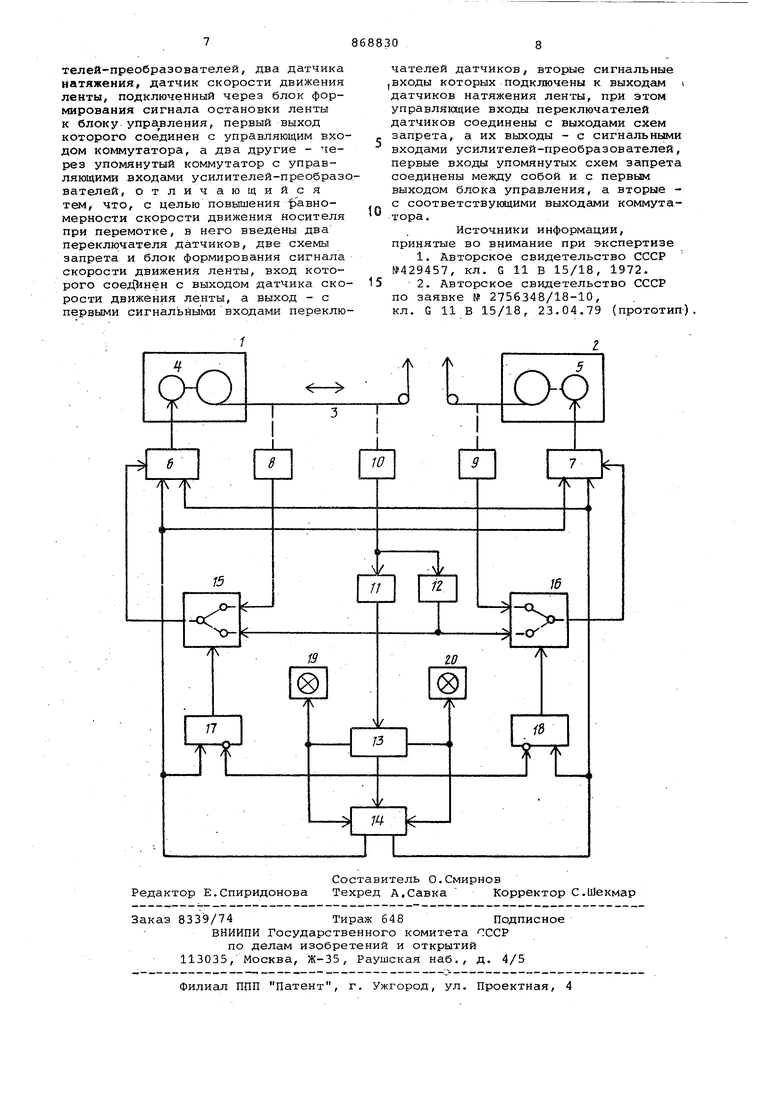
На чертеже приведена функциональная схема лентопротяжного механизма.
Лентопротяжный механизм содержит боковые узлы 1 и 2 с катушками, на которых расположена намотанная в рулоны лента 3, электродвигатели 4 и 5 подключенные к выходам усилителейпреобразовате тей 6 и 7, и два датчика 8 и 9 натяжения ленты, датчик 10 скорости движения ленты, блок 11 формирования сигнала остановки ленты, блок 12 формирования сигнала скорости движения ленты, блок 13 управления и коммутатор 14, а также два переключателя 15 и 16 датчиков и две схемы 17 и 18 запрета. Кроме того, в лентопротяжном механизме использованы индикаторы 19 и 20 режимов Перемотки.
Выход датчика 10 скорости движения ленты одновременно соединен с входом блока 12 формирования сигнала скорости ленты и с входом блока 11 формирования сигнала остановки ленты, выход которого подключен к входу блока 13 управления. Выходы датчиков 8 и 9 натяжения ленты соединены с первыми сигнальными входами переключателей.15 и 16 датчиков, вторые сигнальные входы которых объединены между собой и соединены с выходами блока 12 формирования сигнала скорости движения ленты. Выходы переключателей 15 и 16 датчиков подключены к сигнальным входам усилителей-преобразователей 6 и 7. . Управляющие входы переключателей 15 и 16 датчиков соединены с выходами схем 17 и 18 запрета. Первый выход блока 13 управления соединен одновременно с первым входом коммутатора
14 и с первыми входами схем 17, 18 запрета. Второй и третий выходы блока 13 управления подключены соответственно к второму и третьему входам коммутатора 14, а также к индикаторам 19 и 20. Выходы коммутатора 14 связаны с вторыми входами схем 17 и 18 запрета, управляющими входами усилителей-преобразователей 6 и 7.
Лентопротяжный механизм работает следующим образом.
Натяжение регулируется с помощью двух одинаковых астатических систем стабилизации натяжения с принципом управления по отклонению. Ведущий узел (не показан) разделяет в рабоч режимах тракт движения магнитной ленты на две ветви. В одной ветви натяжение ленты регулируется системой стабилизации, включающей в себя датчик 8 натяжения ленты, усилительпреобразователь 6 и электродвигатель 4 бокового узла 1, а в другой ветви - с помощью второй системы стабилизации, состояще{ из датчика 9 натяжения, усилителя-преобразователя 7 и электродвигателя 5 бокового узла 2 В режимах перемотки ведущий узел отключен, а магнитная лента 3 ускоренно перематывается с катушки одного бокового узла на катущку другого бокового узла. Режим ускоренной перемотки используется в аппаратах магнитной записи для маркирования и оперативного поиска необходимой информации при воспроизведении или монтаже магнитофильмов. При этом при воспроизведении служебной информации во время ускоренной перемотки необходимо иметь достаточно стабильную скорость перемотки магнитной ленты в обоих направлениях.
Из блока 13 управления выдается потенциальная команда по его третьему выходу для включения режима перемотки ленты 3 в прямом направлении, которая поступает на индикатор 20 ПЕРЕМОТКА ВПЕРЕД И на третий вход коммутатора 14. Режим перемотки магнитной ленты 3 в обратном направлении включается потенциальной командой, поступающей с второго выхода блока 13 управления на индикатор 19 ПЕРЕМОТКА НАЗАД И на второй вход коммутатора 14. Далее одноименные включаемому режиму команды ПЕРЕМОТКА ВПЕРЕД или ПЕРЕМОТКА НАЗАД поступают через коммутатор 14 на соответствующие управляющие входы усилителей-преобразователей 6 и 7 для перевода их в нужный режим работы. Одновременно с этим названные команды поступают на второй вход соответствующих схем 17 и 18 запрета и проходят через них соответственно на управляющий вход переключателей 15 и 16 датчиков. Коммутатор 14 участвует в работе лентопротяжноIo механизма только -во время электромагнитного торможения магнитной ленты. При включенном режиме перемотки ленты команда ПЕРЕМОТКА ВПЕРЕД поступает через третий вход коммутатора 14 на его первый выход, а команда ПЕРЕМОТКА НАЗАД - соответственно через второй вход коммутатора 14 на его второй выход. При поступлении команды включения режима перемотки в соответствующем переключат еле 15 или 16 датчиков осуществляется подключение к его выходу и, следователь но, к сигнальному входу соответствующего усилителя-преобразователя 6 или 7 выхода блока 12 формирования сигнала скорости движения ленты. Например, в режиме ПЕРЕМОТКА ВПЕРЕД к сигнальному входу усилителя-преобразователя блока 7, управляющего приемным (в данном режиме} узлом 2, подключается, через переключатель 16 датчиков и блок 12 формирования сигнала скорости движения ленты датчик 10 скорости движения ленты, а усилитель-преобразователь 6, управляющий подающим узлом 1, работает от датчика 8 натяжения ленты. Следовательно, в предлагаемом лентопротяжном механизме в режимах перемотки осуществляется регулирование не только натяжения, но и скорости движения магнитной ленты.
Блок 12 формирования сигнала скорости ленты служит для согласования выхода датчика 10 скорости движения ленты тахогенератора) с усилителемпреобразователелг 6 и 7, входным сигналом которых является, например, напряжение потенциометрических датчиков 8 и 9 натяжения ленты. На вход блока 12 поступает последовательность импульсов от датчика 10 скорости, период следования которых меняется в зависимости от скорости движения ленты, в блоке 12 этот импульсный сигнал преобразуется в потенциальный сигнеш, уровень которого возрастает при уменьшении частоты следования выходных импульсов датчика скорости ленты, т.е. при уменьшении скорости ленты. Отвечающий этому преобразованию блок 12 фор мирования сигнала скорости ленты включает в себя последовательно соединенные формирователь импуЛьсов, инвертор и интегратор (вариант), которые на чертеже не представлены. Принцип стабилизации скорости перемотки не отличается от принципа работы системы стабилизации натяжения ленты. С увеличением скорости движения ленты уменьшается выходной потенциал блока 12. .
Соответственно этому происходит уменьшение напряжения питания электродвигателя приемного узла, которое приводит к снижению скорости движения ленты.
В начальный момент пуска движения магнитной ленты сигнал на выходе блока 12 формирования сигнала скорости ленты имеет максимальное значение и, соответственно, к электродвигателю .приемного узла в этот момент также будет приложено максимальное напряжение. Таким образом, автоматически и без дополнительных элементов осуществляется форсированный пуск ленты, повы111а1аций оперативность обращения к лентопротяжному механизму.
Остановка магнитной ленты в режимах перемоток происходит следующим образом.
Из блока 13 управления выдается по его первому выходу команда ВКЛ. СТОП, которая запирает схемы 17 и il8 запрета и изменяет состояние коммутатора 14. При этом в коммутаторе ,14 его второй вход подключается к первому выходу, а третий вход соединяется с вторым выходом коммутатора. Происходит мягкое и быстрое торможение магнитной ленты. При достижении ею нулевой скорости блок 11 формирования сигнала остановки ленты вьадает соответствукнций сигнал в блок 13 управления для выключения режима ПЕРЕМОТКА НАЗАД И снятия команды ВЮ. СТОП с его первого выхода. В обесточенном состоянии боковые узлы 1 и 2 фиксируются простыми механическими тормозами, KOTOjMje на чертеже не показаны.
Возможность установки оптимального натяжения для конкретного тракта лентопротяжного механизма и размеров магнитной ленты,а также равномерность перемотки позволяют сохранить первоначсшьныё физико-механические свойства дорогостоящих магнитных лент в течение длительного времени их зк-сплуатации. Следовательно, предлагаемый лентопротяжный механизм снижает стоимость эксплуатации аппаратуры точной магнитной записи. Кроме того, высокая стабильность скорости движения магнитной ленты при ее перемотке в обоих направлениях, а также форсированный пуск в этих режимах магнитной ленты и эффективное ее торможение делают перспективным использование предлагаемого) {лентопротяжного механизма для целей организации автоматизированного поиска записанной на ленте информации. В связи с этим высокоточные системы маркирования и поиска информации реализуются с меньшими материальными затратами.
Формула изобретения
Лентопротяжный механизм, содержащий боковые узлы, электродвигатели которых соединены с выходами усили
