i 1з()б)етение относится к технике магнитной записи и может быть использовано в приводных устройствах кассетных магнитофонов.
Известен лентопротяжный механизм кассетного магнитофона, содержащий асинхронные электродвигатели, связанные с принимающим и подающим узлами, а также электродвигатель для косвенного привода ведущего узла.
Недостатки известного механизма - низкая надежность и невысокая равномерность транспортирования магнитной ленты.
Наиболее близким к предлагаемому по технической сущности и достигаемому результату является лентопротяжный механизм кассетного магнитофона, содержащий электродвигатели постоянного тока, статоры и роторы которых расположены в общем корпусе с крышкой, причем роторы охвачены статорами и связаны с ведущим, подающим и приемным узлами 2.
Однако данный механизм характеризуется невысокой равномерностью транспортирования магнитной ленты.
Целью изобретения является повыщение равномерности транспортирования магнитной ленты в кассетном магнитофоне и повышение надежности.
Поставленная цель достигается тем, что в лентопротяжном механизме кассетного магнитофона, содержащем электродвигатели постоянного тока, статоры и роторы которых расположены в общем корпусе с крышкой, причем роторы охвачены статорами и связаны с ведущим, подающим и приемным узлами, электродвигатели выполнены вентильными, статор каждого электродвигателя содержит две пары диаметрально расположенных сегментов, каждая пара которых закреплена соответственно внутри корпуса и на внешней поверхности крыщки, а соответствующий ротор - полую втулку с двумя кольцами полюсов соответствующих пар сегментов, причем плоскости, проходящие через оси симметрии статоров электродвигателей приемного и ведущего узлов, параллельны, а подающего и приемного - перпендикулярны.
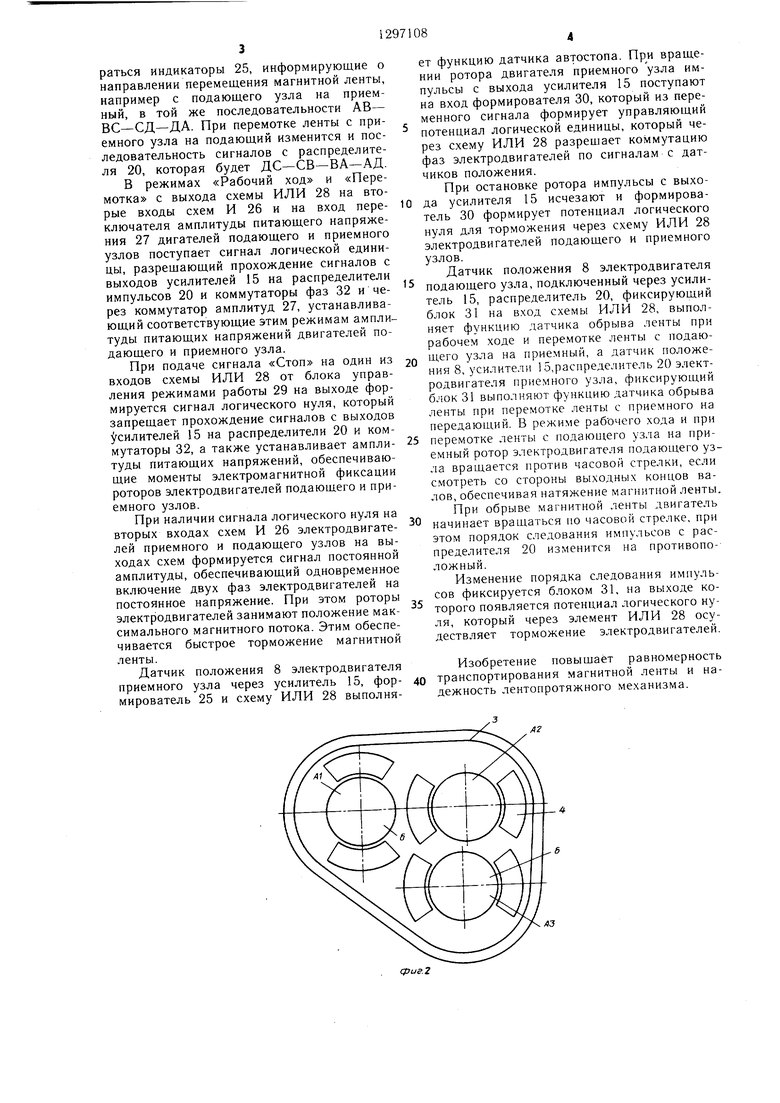
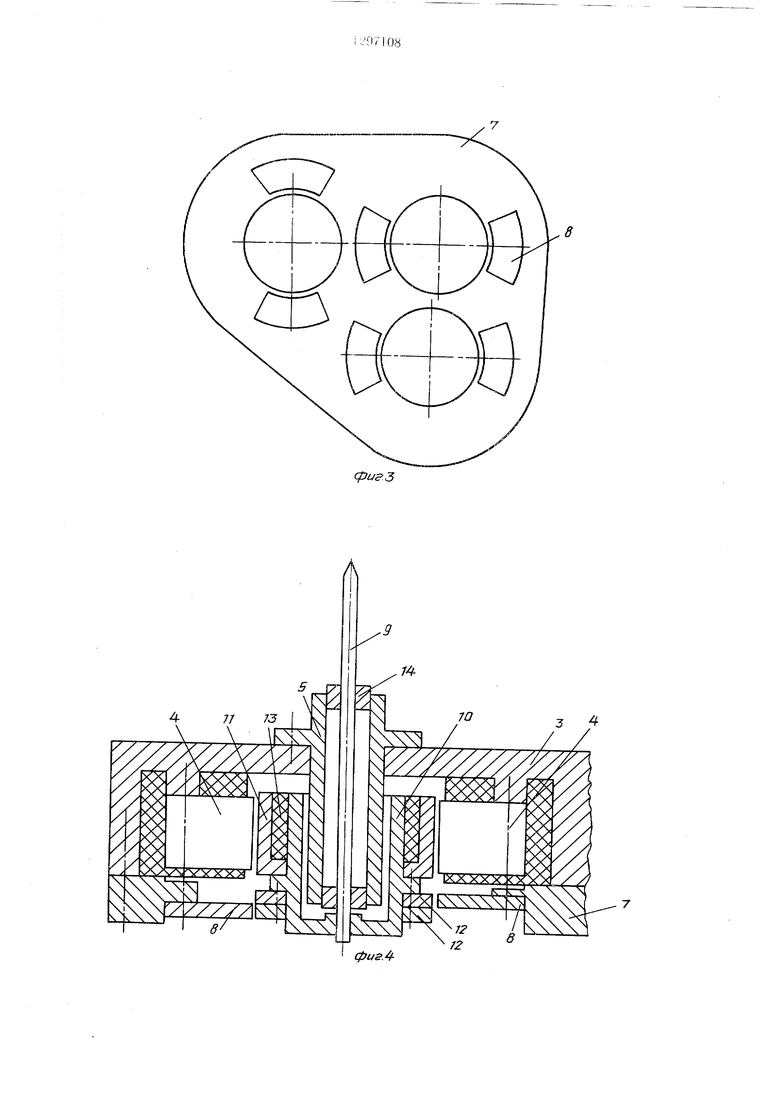
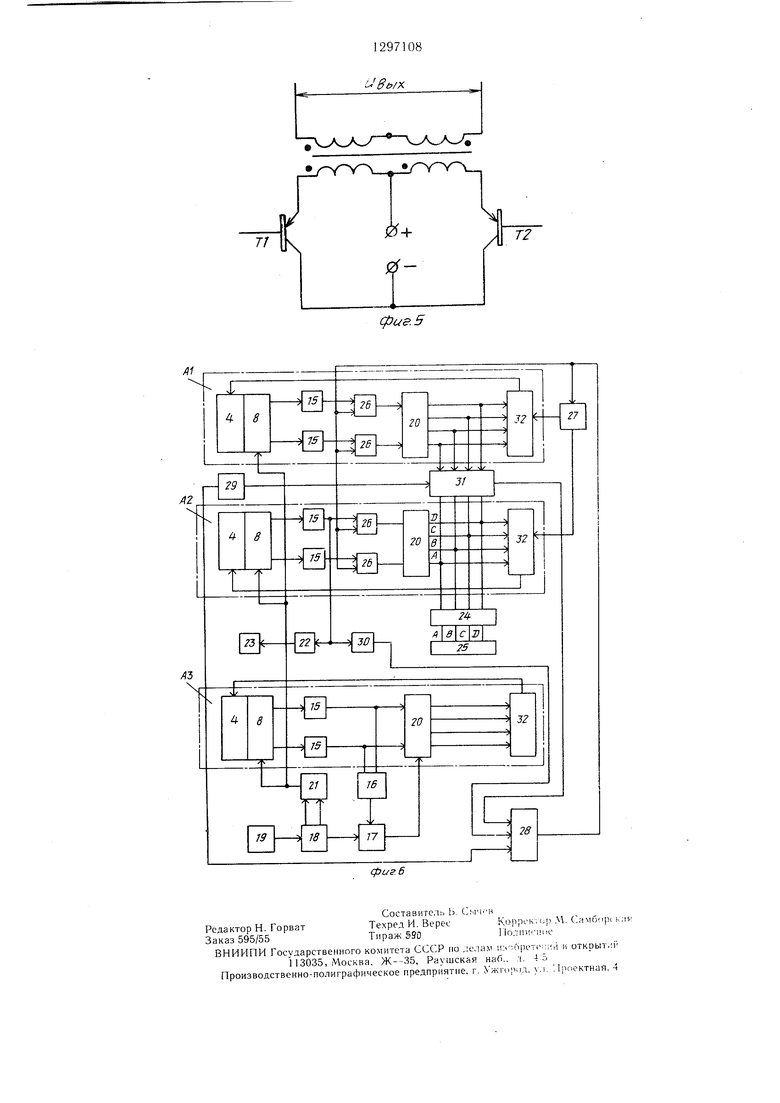
На фиг. 1 изображен предлагаемый лентопротяжный механизм; на фиг. 2 - взаимное расположение статоров электродвига-. телей в корпусе; на фиг. 3 - взаимное расположение статоров датчиков положения на крышке; на фиг. 4 - конструктивное расположение элементов каждого электродвигателя; на фиг. 5 - схема включения обмоток возбуждения датчиков положения; на фиг. 6 - структурная схема лентопротяжного механизма.
Устройство содержит (фиг. 1) блок электродвигателей 1 и блок управляемых коммутаторов 2. Блок электродвигателей 1 содержит (фиг. 2} корпус 3 с установленными в нем статорами электродвигателей 4,
подшипниковыми узлами 5, в которых установлены роторы 6 и аксиально смещен ная крышка 7 со статорами 8 датчиков положения роторов электродвигателей подаю- ш.его AI, приемного Аг и ведущего Аз узлов. Роторы б электродвигателей содержат (фиг. 3) вал 9, полую втулку 10, охватывающую подшипниковый узел, два кольца полюсов 11 и 12, вибропоглощающий материал 13. Статоры 8 датчиков положения
установлены в двух плоскостях с аксиальным смещением одного относительно другого. Имеются подшипники скольжения 14. Структурная схема лентопротяжного механизма (фиг. 6) включает в себя усилители 15 электродвигателя АЗ, формирователь
импульсов 16, дискретно-фазовый регулятор скорости с фазовой коррекцией 17, делитель частоты 18, кварцевый генератор 19 опорной частоты, распределитель импульсов 20, инвертор 21. Обмотка возбуждения кажQ лого статора датчика положения ротора выполнена со средней точкой и включена в коллекторные цепи транзисторов Ti и Т2 инвертора 21 с независимым возбуждением (фиг. 5), управляемого через делитель частоты 18 сигналами кварцевого генератора 19.
5 Выход усилителя 15 электродвигателя А через счетчик 22 подключен к индикатору расхода магнитной ленты 23. Выход распределителя импульсов 20 электродвигателей А через блок делителей частоты 24 подключен к индикатору направления перемеще0 ния магнитной ленты 25. Выходы усилителей 15 сигналов датчиков положения подключены к первым входам схем И 26, выходы которых соединены с входами распределителей импульсов 20, а вторые входы схем И 26 и вход переключателя амплитуды пи тающего напряжения 27 двигателей AI и А2 подключены к выходу схемы ИЛИ 28, один из входов которой соединен с выходами блока управления режимами работы 29, формирующего сигнал «Стоп. Выход усилите0 ля 15 сигналов датчика положения ротора электродвигателя А2 через формирователь управляющих импульсов 30 подключен к одному из входов схемы ИЛИ 28. Выходы распределителей импульсов 20 электродвигателей А| и Аг через блок 31, фикси5 руЕощий изменение порядка следования импульсов, подключены к одному из входов схемы ИЛИ 28.
Имеются ко.ммз таторы 32 ведущего, подающего и приемного электродвигателей: Управление лентопротяжным механизмом осупдествляется следующим образом. В режиме «Рабочий ход сигналы с выхода распределителя импульсов 20 приемного или по- даюпдего узла через блок делителей частоты 24 поступает на вход индикатора на- t правления перемещения магнитной ленты 23. По мере поступления импульса на фазы двигателей, например, при числе фаз, равном четырем, .АВ -ВС-СД-ДА будут заго0
раться индикаторы 25, информирующие о направлении перемещения магнитной ленты, например с подающего узла на приемный, в той же последовательности АВ- ВС-СД-ДА. При перемотке ленты с приемного узла на подающий изменится и последовательность сигналов с распределителя 20, которая будет ДС-СВ-ВА-АД. В режимах «Рабочий ход и «Перемотка с выхода схемы ИЛИ 28 на втоет функцию датчика автостопа. При вращении ротора двигателя приемного узла импульсы с выхода усилителя 15 поступают на вход формирователя 30, который из переменного сигнала формирует управляющий потенциал логической единицы, который через схему ИЛИ 28 разрещает коммутацию фаз электродвигателей по сигналам с датчиков положения.
При остановке ротора импульсы с выхорые входы схем И 26 и на вход пере- Ю да усилителя 15 исчезают и формирователь 30 формирует потенциал логического нуля для торможения через схему ИЛИ 28 электродвигателей подающего и приемного узлов.
15
тель 30 формирует потенциал логического нуля для торможения через схему ИЛИ 28 электродвигателей подающего и приемного узлов.
Датчик положения 8 электродвигателя подающего узла, подключенный через усилитель 15, распределитель 20, фиксирующий блок 31 на вход схемы ИЛИ 28, выполняет функцию датчика обрыва ленты при рабочем ходе и перемотке ленты с подаюключателя амплитуды питающего напряжения 27 дигателей подающего и приемного узлов поступает сигнал логической единицы, разрещающий прохождение сигналов с выходов усилителей 15 на распределители импульсов 20 и коммутаторы фаз 32 и через коммутатор амплитуд 27, устанавливающий соответствующие зтим режимам амплитуды питающих напряжений двигателей подающего и приемного узла.
При подаче сигнала «Стоп на один из 20 приемный, а датчик положе- входов схемы ИЛИ 28 от блока управ-ния 8, усилители. 15,распределитель 20 электления режимами работы 29 на выходе фор-родвигателя приемного узла, фиксирующий
мируется сигнал логического нуля, который блок 31 выполняют функцию датчика обрыва запрещает прохождение сигналов с выходов ленты при перемотке ленты с приемного на силителей 15 на распределители 20 и ком-передающий. В режиме рабочего хода и при
мутаторы 32, а также устанавливает ампли- 25 перемотке ленты с подающего узла на при- туды питающих напряжений, обеспечиваю-емный ротор электродвигателя подающего уз
щие моменты электромагнитной фиксации роторов электродвигателей подающего и приемного узлов.
При наличии сигнала логического нуля на вторых входах схем И 26 электродвигателей приемного и подающего узлов на выходах схем формируется сигнал постоянной амплитуды, обеспечивающий одновременное включение двух фаз электродвигателей на
30
постоянное напряжение. При этом роторы электродвигателей занимают положение максимального магнитного потока. Этим обеспечивается быстрое торможение магнитной ленты.
Датчик положения 8 электродвигателя
35
ла вращается против часовом стрелки, если смотреть со стороны выходных концов валов, обеспечивая натяжение магнитной ленты.
При обрыве магнитной ленты двигатель начинает вращаться по часовой стрелке, при этом порядок следования импульсов с распределителя 20 изменится на противоположный.
Изменение порядка следования импульсов фиксируется блоком 31, на выходе которого появляется потенциал логического нуля, который через элемент ИЛИ 28 осу- дествляет торможение электродвигателей.
Изобретение повыщаёт равномерность
приемного узла через усилитель 15, фор- 40 транспортирования магнитной ленты и на- мирователь 25 и схему ИЛИ 28 выполня-дежность лентопротяжного механизма.
ет функцию датчика автостопа. При вращении ротора двигателя приемного узла импульсы с выхода усилителя 15 поступают на вход формирователя 30, который из переменного сигнала формирует управляющий потенциал логической единицы, который через схему ИЛИ 28 разрещает коммутацию фаз электродвигателей по сигналам с датчиков положения.
При остановке ротора импульсы с выхода усилителя 15 исчезают и формирова
тель 30 формирует потенциал логического нуля для торможения через схему ИЛИ 28 электродвигателей подающего и приемного узлов.
Датчик положения 8 электродвигателя подающего узла, подключенный через усилитель 15, распределитель 20, фиксирующий блок 31 на вход схемы ИЛИ 28, выполняет функцию датчика обрыва ленты при рабочем ходе и перемотке ленты с подаю
ла вращается против часовом стрелки, если смотреть со стороны выходных концов валов, обеспечивая натяжение магнитной ленты.
При обрыве магнитной ленты двигатель начинает вращаться по часовой стрелке, при этом порядок следования импульсов с распределителя 20 изменится на противоположный.
Изменение порядка следования импульсов фиксируется блоком 31, на выходе которого появляется потенциал логического нуля, который через элемент ИЛИ 28 осу- дествляет торможение электродвигателей.
Изобретение повыщаёт равномерность
транспортирования магнитной ленты и на- дежность лентопротяжного механизма.
/4
A3
фиг.З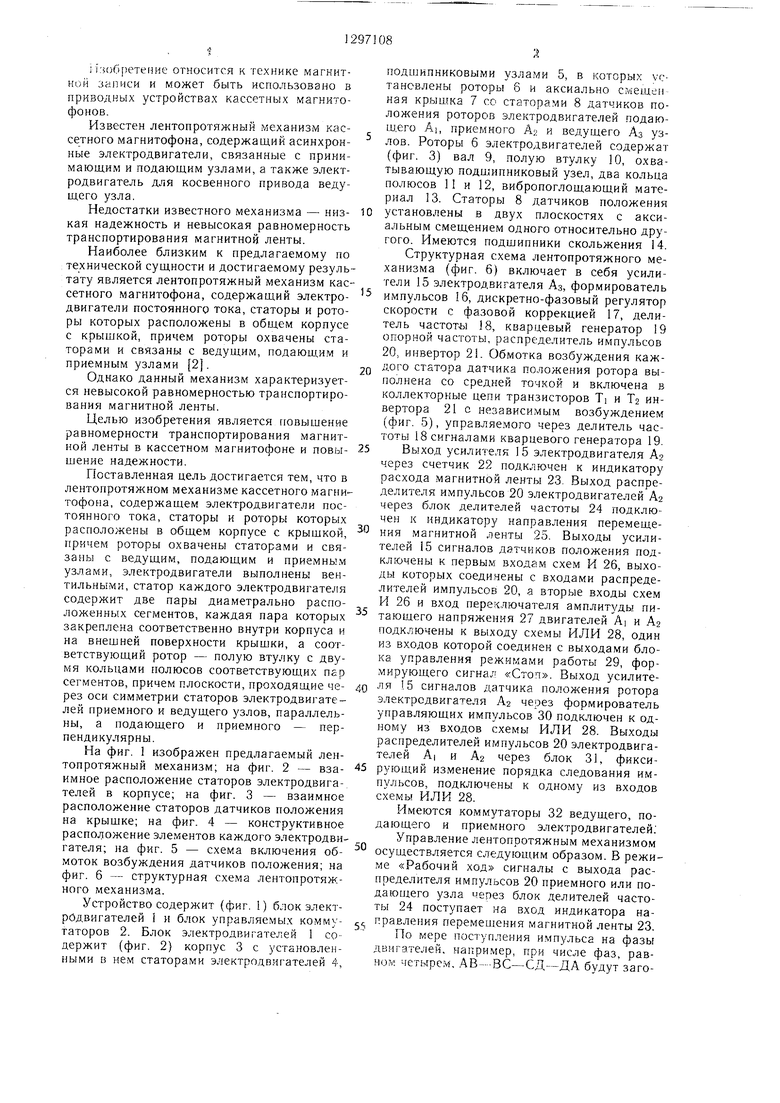
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления лентопротяжным механизмом магнитофона | 1980 |
|
SU972584A1 |
| Лентопротяжный механизм кассетного магнитофона | 1986 |
|
SU1628087A1 |
| ЛЕНТОПРОТЯЖНЫЙ МЕХАНИЗМ КАССЕТНОГО МАГНИТОФОНА | 1992 |
|
RU2054202C1 |
| Лентопротяжный механизм | 1979 |
|
SU868830A1 |
| Аппарат магнитной записи | 1983 |
|
SU1081662A1 |
| Устройство для перемотки магнитной ленты | 1982 |
|
SU1123053A1 |
| Устройство для перемещения магнитной ленты | 1989 |
|
SU1691885A1 |
| Лентопротяжный механизм кассетного магнитофона | 1978 |
|
SU712839A1 |
| Лентопротяжный механизм | 1987 |
|
SU1578758A1 |
| Лентопротяжный механизм кассетного магнитофона | 1983 |
|
SU1138832A1 |
фиг. 4
фие.5
/ | 9|c|j
Составите.) Ь. (,
Техред И. ВересКоррек-;;,) .W. CaMOopi кпя
Тираж 590 io;jiu -i utВНИИПИ Государственного комитета СССР но лелам n:i--.6peTo::; ,i и открыт,п 1 13035, Москва. Ж--35, Раушская наб.. ,ч. 45 Производственно-полиграфическое предприятне, г. Ужгород. .i. Лроектная. 4
Редактор Н. Горват Заказ 595/55
| Шевченко В | |||
| И., Ткаченко В | |||
| Н., Матьев- ский В | |||
| П | |||
| Бытовая аппаратура магнитной записи | |||
| Способ получения фтористых солей | 1914 |
|
SU1980A1 |
| Приспособление для записи звуковых явлений на светочувствительной поверхности | 1919 |
|
SU101A1 |
| Funkschau, № 6, 1981, с | |||
| Прибор для промывания газов | 1922 |
|
SU20A1 |
