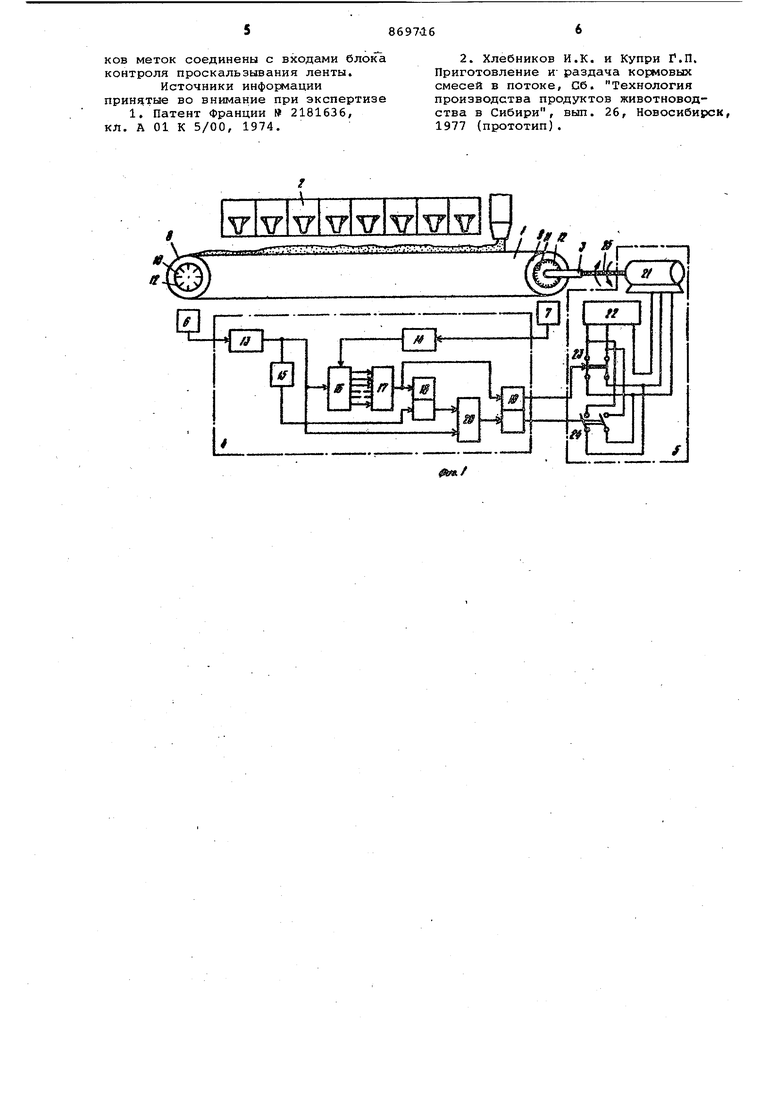
Изобретение относится к области сельского хозяйства, в частности к устройствам для раздачи кормов животным. Известно устройство для раздачи, кормов животным, содержсодее две бес конечные цепи, между которыми находится плоскость распределения кормо а на цепях закреплен ряд свободно поворачивающихся транспортирующих створок l . Устройство обеспечивает равномер ную вьщачу корма, однако оно сложно в реализаци-и. Наиболее близким по технической сущности к предложенному устройству является устройство для раздачи кор мов, содержащее ленточный транспортер с обйодннм и приводным барабанами, расположенный вдоль ряда стойл животных, и механизм ручного натяжения ленты з. После загрузки ленты транспортера на всю длину последний останавливае ся, и животные поедают корм с транс портера напротив своего стойла. Однако отсутствие блоков, позвол ющих осуществлять контроль и управление натяжением ленты транспортера обуславливает ее проскальзывание, что снижает надежность его в работе. Целью изобретения является повышение надежности устройства в работе, путем исключения проскальзывания ленты. Поставленная цель достигается тем, что устройство снабжено имеющими метками дисками, закрепленными на приводном и отводном барабанах транспортера, датчиками меток, блоком контроля проскальзывания ленты и блоком управления механизмом натяжения ленты, причем блок контроля проскальзывания ленты соединен с блоком управления механизмом натяжения ленты, а выходы датчиков меток соединены с входами блока контроля проскальзывания ленты. На фиг. 1 представлена блок-схема, поясняюв ая работу устройства/ на фиг. 2 - эпюры, поясняющие работу блока контроля проскальзывания ленты; на фиг. 3 - схема, поясняющая работу механизма натяжения ленты. Устройство содержит ленточный транспортер 1, расположенный вдоль ряда стойл 2, механизм 3 натяжения ленты (фиг. З) , блок 4 контроля проскальзывания ленты, соединенный с Влоком 5 управления механизмом 3 натяжения ленты, датчики 6 и 7 меток и подключенные на входы блока 4 конт роля проскальзывания ленты приводной 8 и обводнрй 9 барабаны транспортера, на которых закреплены диски 10 и 11.с метками 12. Блок 4 контроля проскальзывания ленты содержит формирователи 13 и 14 импульсов, элемент задержки 15, счет чик 16, дешифратор 17, триггеры 18 и 19, элемент 20 совпадения. Блок 5 управления механизмом натяжения ленты имеет электродвигатель 21,питаемый от трехфазной сети 22 через ключевые элементы 23 и 24, вал электро игателя сопряжен с винтом 25 механизма 3 натяжения ленты. Механизм 3 натяжения ленты Лфиг.З состоит из винта 25, ввернутого в траверсу. 26, направляющей 27 и буртика 28. Устройство работает следующим образом. Например, в исходный момент време ни сила натАжения превышает -номиналь ную величину, необходимую для обеспечения непроскальзывания ленты тран портера 1. После включения.привода вращается приводной барабан 8 и приводит в движение ленту, на которую подается из бункера корм. Лента при водит во вращение обводной барабан При этом также вращаются диски 10 и 11, метки 12 воздействуют на чувст вительные элементы датчиков 6 и 7. Сигналы с датчиков 6 и 7 поступают на формирователи импульсов 13 и 14, на выходе которых они имеют коротких импульсов (фиг. 2 а, б, соответственно). Число импульсов соответствует числу меток, прошедши около датчика меток. Промежуток времени между соседними импульсами с формирователя 13 определяет цикл работы блока 4 конт роля проскальзывания ленты (фиг. 2 а). Так как число меток 12 на дис ке 10 меньше в 100 раз, чем на днеке 11, и проскальзывание отсутствует, в промежутке между двумя импуль сами с формирователя 13 укладываетс 100 импульсов с формирователя 14 (фиг. 2, а, б первый цикл). Импуль с формирователя 13 считывает состояние триггера 18 (О соответствует отсутствию проскальзывания, а 1 - наличию проскальЗьшания), ч рез 3J7eMeHT 15 задержки (фиг.2 г,в) устан|1вливает триггер 18 в положение i, а в счетчике 16 код, доответствующий числу 100 (фиг.2, г). Время задержки элемента 15 не превы шает половины периода сигнала с вых да формирователя 14. После установки в счетчике 16 чи ла 100 начинается цикл измерения, в течение которого импульсы, поступающие с формирователя 14 ,на другой вход счетчика 16, уменьшают записанное число. Так как проскальзывание отсутствует, то с формирователя 14 поступит 100 импульсов, таким образом в конце первого цикла счетчика будет соответствовать числу О, а в момент времени t - контролируемому числу N заданному, в момент времени t на выходе дешифратора 17 появится сигнал (фиг.2 г,д) о том, что проскальзывания нет. Этот сигнал установит триггер 18 в состояние О которое сохраняется до момента появления задержанного импульса с формирователя 13 (фиг. 2, е) . Состояние триггера 19 не изменяется, так как импульс с. формирователя 13 через элемент 20 совпадения 2 проходит (фиг.2, ж, 3, и, 1-й цикл), при этом ключевой элемент 23 замкнут, а элемент 24 разомкнут, электродвигатель 21 вращается в сторону ослабления. При этом винт 25 (фиг. 3) вращается и перемещает траверсу 26 по направляющей 27 в направлении от электродвигателя 21, устанавливая номинальную величину натяжения Ленты. Когда имеется проскальзывание ленты транспортера, в течение цикла на выходе дешифратора 17 сигнал не появится, и триггер 18 останется в состоянии 1, в которое он устанавливается в начале каждого цикла. Тогда в конце цикла импульс с формирователя 13 пройдет через элемент 20 совпадения и изменит состояние триггера 19 на обратное. Это вызовет включение ключевого элемента 24 и отключение элемента 23, при этом меняются две фазы сети 22,что приведет к изменению направления вращения электродвигателя 21 в направлении натяжения ленты транспортера до исчезновения проскальзывания. Таким образом, устройство исключает проскальзывание ленты транспортера, что повышает надежность его в работе. Формула изобретения Устройство для раздачи кормов, состоящее из ленточного транспортера с приводным и обводным барабанами, расположенного вдоль ряда, стойл животных, и механизма натяжения ленты, отличающееся тем, что, с целью повышения надежности его в работе путем исключения проскальзывания ленты, оно снабжено имеющими метки дисками, закрепленными на приводном и обводном барабанах транспортера, датчиками меток,блоком контроля проскальзывания ленты, и блоком управления механизмом натяжения ленты, причем блок контроля .проскальзывания Ленты соединен с блоком управления механизмом натяжения ленты, а выходы датчиков меток соединены с входами блока контроля проскальзывания ленты.
Источники информации принятые во внимание при экспертизе
1. Патент Франции № 2181636, КЛ. А 01 К 5/00, 1974.
2. Хлебников И.К. и Купри Г.П. Приготовление и раздача кормовых смесей в потоке. Сб. Технология производства продуктов животноводства в Сибири, вьш. 26, Новосибирск, 1977 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство раздачи корма | 1987 |
|
SU1450795A1 |
| Устройство для раздачи корма | 1990 |
|
SU1692435A1 |
| Устройство для раздачи корма | 1988 |
|
SU1546028A1 |
| Устройство для контроля проскаль-зыВАНия лЕНТы ТРАНСпОРТЕРА | 1979 |
|
SU839915A1 |
| Устройство для контроля проскальзывания и отклонения скорости гибкой тяги | 1989 |
|
SU1791839A1 |
| Автоматический кормораздатчик для индивидуальной раздачи корма скоту при привязном содержании | 1989 |
|
SU1722333A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ДЛИНЫ ЛЕГКОДЕФОРМИРУЕМЫХ МАТЕРИАЛОВ | 2004 |
|
RU2256877C1 |
| Датчик параметров жидкости | 1983 |
|
SU1124200A2 |
| Аппарат магнитной записи | 1982 |
|
SU1064312A1 |
| Устройство для построения сейсмических разрезов | 1985 |
|
SU1291917A1 |


