(54) УСПОЙСТВО ДЛЯ КОНТРОЛЯ ПРОСКАЛЬЗЫВАНИЯ ЛЕНТЫ ТРАНСПОРТЕРА
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для раздачи кормов | 1980 |
|
SU869716A1 |
| Устройство для измерения величины проскальзывания ленты конвейера | 1982 |
|
SU1027116A1 |
| Устройство для градуировки измерительных преобразователей давления | 1983 |
|
SU1137366A1 |
| Устройство контроля проскальзывающей ленты конвейера | 1976 |
|
SU630161A1 |
| Устройство для контроля проскаль-зывания ленты конвейера | 1973 |
|
SU508449A1 |
| Устройство раздачи корма | 1987 |
|
SU1450795A1 |
| Устройство контроля проскальзывания ленты конвейера | 1983 |
|
SU1114598A1 |
| Устройство для контроля проскальзывания и отклонения скорости гибкой тяги | 1989 |
|
SU1791839A1 |
| Устройство для контроля пробуксовки ленточного конвейера | 1978 |
|
SU737322A1 |
| Фазоизбирательное устройство | 1984 |
|
SU1257556A1 |
Изобретение относится к автоматизации конвейерного транспорта и може быть использовано для измерения и контроля коэффициента проскальзывания транспортеров и конвейеров в животноводстве и других областях.
Известно устройство для защиты транспортной установки при пробуксовке тягового органа, включающее датчик вращения приводного шкива, датчик движения тягового органа и блок сравнения LQ
Недостатком такого устройства является большой объем счетчика и большое время контроля.
Известно также устройство для контроля проскальзывания ленты и транспортера, содержащее импульсные датчики перемещения ленты к наружной поверхности приводного барабана, соединенные с формирователями импульсов,блок задержки,счетчик дешифратор,логический и исполнительный блоки и блок индикации fzj.
Однако у известного устройства невысокая точность и малое быстродействие .
Цель изобретения - повьшзение точности и быстродействия контроля.
Поставленная цель достигается тем, что устройство снабжено умноткятелем частоты, включенным между формирователем импульсов датчика перемещения ленты и одним из входов счетчика, при этом выход формирователя импульсов датчика перемещения наружной поверхности приводного барабана соединен с входом блока задержки и одним из входов логического блока.
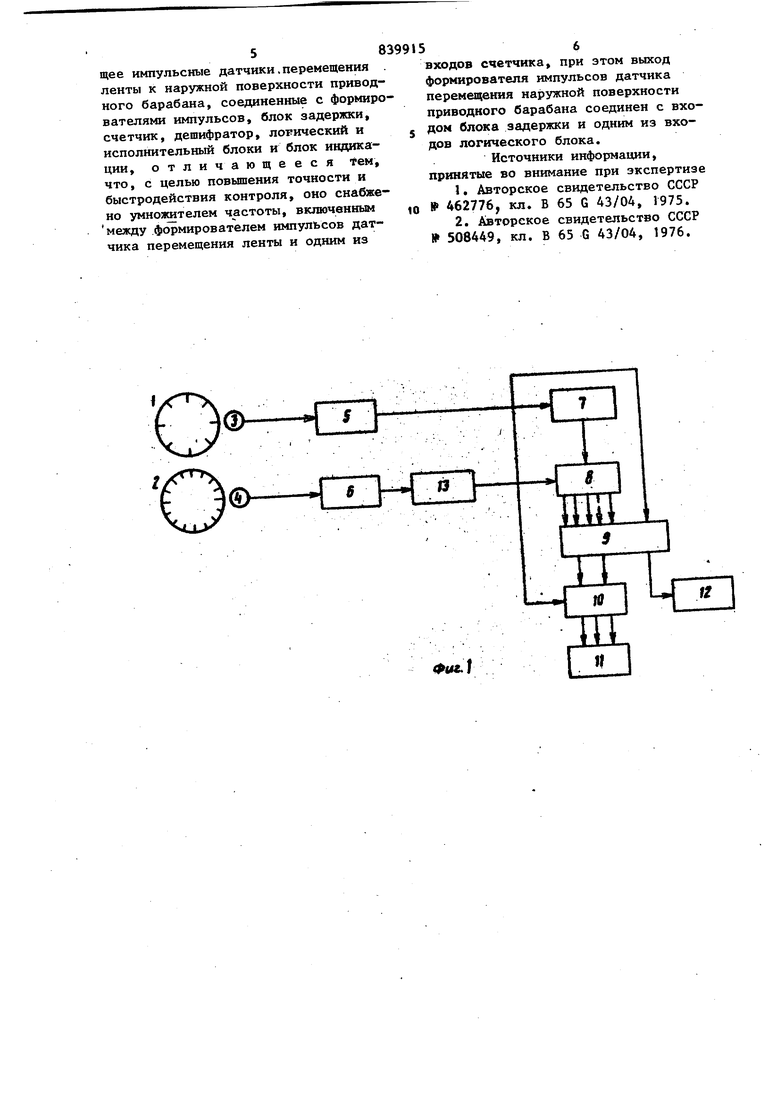
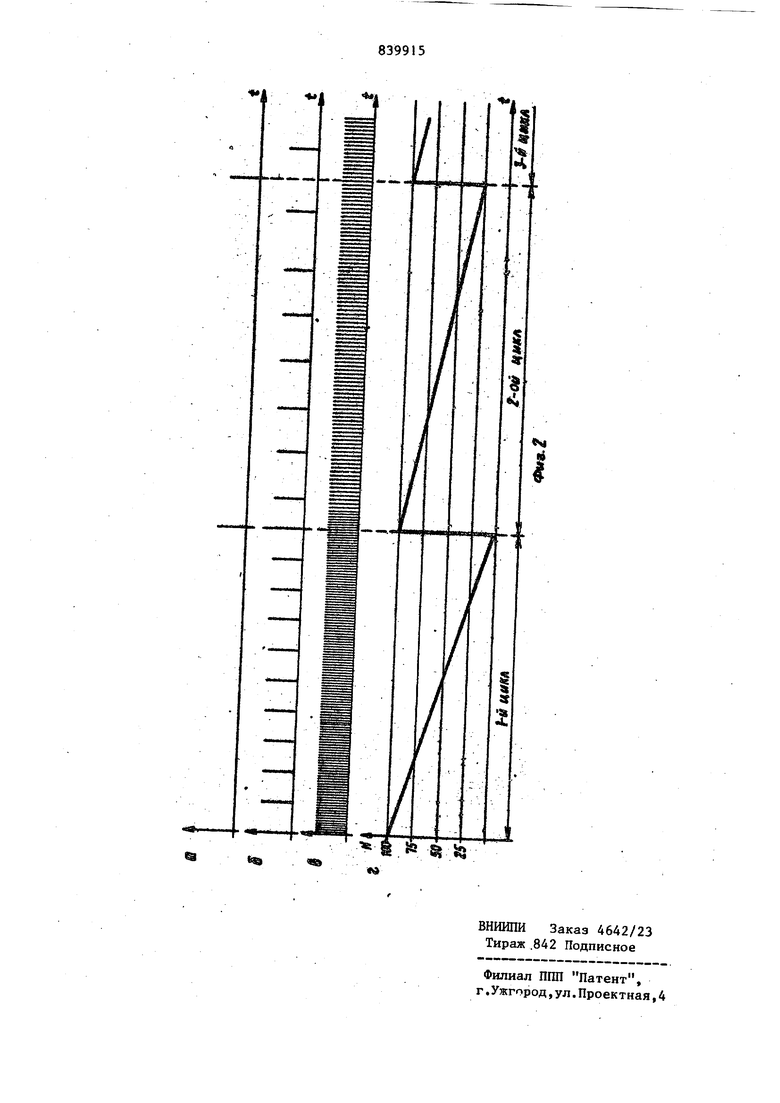
На фиг. 1 изображена функциональная схема устройства; на фиг. 2 временные диаграммы работы устройства.
Устройство содержит зубчатые диски 1 и 2, кинематически связанные с приводным барабаном транспортера и лентой транспортера соответственно; датчики 3 и 4 меток; формирователи 5 и 6 импульсов; последовательно соединенные блок 7 задержки счет чик 8, дешифратор 9, логический 10 и исполнительный II блоки, а также блок 12 индикации, подключенный к одному из .выходогв дешифратора 9, и умножитель 13 частоты, подключенный между выходом фop шpoвaтeля б импульсов и другим входом, счетчика 8. Выходы датчиков 3 и 4 меток, подключены, соответственно, к входам формирователей 5 и 6 импульсов. Выход формирователя 5 импульсов соединен с входами блока 7 задержки, логического блока 10 и дешифратора 9 Диск 1 имеет в 10 раз меньше зубцов, чем диск 2, и насажен на вал приводного барабана. Зубцы расположены равномерно по окружности дисков. Диск 2 насажен на вал обводного ролика, соприкасающегося с внутренней поверхностью ленты транспортера, причем диаметр обводного ролика равен диаметру приводного барабана.
Устройство работает следующим образом.
При нормальной работе транспортера (т.е. лента не проскальзывает) диски 1 и 2 вращаются и своими зубцами воздействуют на чувствительные элементы датчиков 3 и 4 меток. Сигналы с датчиков 3 и 4 поступают на формирователи 5 и 6 импульсов, на выходе которых они имеют форму коротких импульсов (фиг, 2, а и б соответственно) . Число импульсов соответствует числу зубцов, прошедших мимо датчика меток. Промежуток времени между двумя соседними импульсами с формирователя 5 (фиг. 2а) определяет цикл работы устройства. Так как число зубцов на диске 1 меньше в 10 раз, чем на диске 2, то при отсутствии проскальзывания в промежутке между двумя импульсами с формирователя 5 укладьшается 10 периодов импульсного сигнала с .формирователя 5 (фиг.2 а и б, первый цикл). Сигнал с выхода формирователя 6 на вход счетчика 8 поступает через умножитель 13 частоты. При коэффициенте умножения, равном 10 период импульсного сигнала .с выхода формирователя 6 делится зтножителем 13 частоты на десять равных частей (фиг. 2, в), что позволяет
определить дробные части периода сигнала с формирователя 6 с точностью до 0,1, Импульс, пришедший с выхода формирователя 5 импульсов
на входы дешифратора и логического блока, считывает результат измерения коэффициента проскальзывания на блок 12 индикации, где он индицируется в течение следукацего цикла, а также
считывает решение, принятое логическим блоком 10 на исполнительный блок 11, который обрабатывает его в течение следующего цикла. Кроме того, этот же импульс через блок 7
задержки устанавливает в счетчике 8 код, соответствующий числу 100 (фиг, 2, г) . Время задержки не превьш1ает половины периода сигнала с выхода умножителя 13 частоты. После
установки в счетчике числа I00 начинается следующий цикл измерения, в течение которого импульсы, поступающие с выхода умножителя 13 частоты на другой вход уменьшают записанное число. При отсутствии проскальзьшания с умножителя 13 частоты поступает 100 импульсов (фиг, 2, г первый цикл), а при наличии проскальзьшания (фиг, 2, г, второй цикл)
число импульсов меньше 100.
Таким образом, в конце первого цикла код счетчика соответствует числу О, а в конце второго цикла числу 25. Т.е. в первом цикле в
эталонном интервале времени укладывается 10 периодов импульсного сигнала с выхода формирователя 6, а во втором цикле - только 7,5 периода, причем половина восьмого периода
определена благодаря делению его
умножителем частоты на десять равных частей.
В устройстве точность определения коэффициента проскальзьгоания зависит
от коэффициента умножения частоты, а по сравнению с известным точность повышается в 10 раз при том же времени измерения и коэффициенте умножения умножителя частоты, равном 10.
При коэффициенте умножения 100, кроме того, повышается быстродействие в 10 раз, так как для подачи 100 импульсов с умножителя частоты на счетчик требуется в десять раз
меньше эталонный интервал времени.
Формула изобретения Устройство для контроля проскальзывания ленты транспортера, содержащее иьтульсные датчики,перемещения . ленты к наружной поверхности приводного барабана, соединенные с формирователями импульсов, блок задержки, счетчик, дешифратор, логический и исполнительный блоки и блок индикаотличающееся teM,
ции,
что, с целью повышения точности и быстродействия контроля, оно снабжено умнозкителем частоты, включенньвл между формирователем импульсов датчика перемещения ленты и одним из
входов счетчика, при этом выход формирователя импульсов датчика перемещения наружной поверхности приводного барабана соединен с входом блока задержки и одним из входов логического блока.
Источники информации, принятые во внимание при экспертизе
