(54) СИТОВОЙ АНАЛИЗАТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОМЕХАНИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ИЗМЕЛЬЧЕНИЯ И ПЕРЕМЕШИВАНИЯ ПИЩЕВЫХ ПРОДУКТОВ | 1992 |
|
RU2045194C1 |
| Линейный электродвигатель | 1977 |
|
SU693514A1 |
| Способ погружения свай и устройство для его осуществления | 1990 |
|
SU1778240A1 |
| УНИВЕРСАЛЬНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА БЕЛАШОВА | 2000 |
|
RU2218651C2 |
| Электромагнитный скважинный возбудитель колебаний | 1982 |
|
SU1039581A1 |
| Ситовой анализатор | 1979 |
|
SU859876A1 |
| МАГНИТОГИДРОПУЛЬСОР | 2012 |
|
RU2539225C2 |
| МОДУЛЬНО-ДИСКОВАЯ УНИВЕРСАЛЬНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА БЕЛАШОВА | 2008 |
|
RU2368996C1 |
| МНОГОПОЛЮСНЫЙ ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2015 |
|
RU2597993C1 |
| ЭЛЕКТРОПРИВОД ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ ИМПУЛЬСНОГО ВИБРОИСТОЧНИКА | 2012 |
|
RU2491709C1 |
I
Изобретение относится к устройствам для механического разделения сыпучих материалов на фракции и может быть использовано в горнообогатительной, пищевой, химической и других отраслях промышленности.
Известен ситовой анализатор, включающий набор сит, закрепленный на корпусе, снабженном дебалансным вибратором и установленном через упругие элементы на неподвижном основании, где смонтирован его электропривод 1.
Недостатком является то, что устройство не обладает возможностью многовариантной настройки режимов и требует обеспечения условий самосинхронизации двух своих вибраторов со скрещивающимися осями.
Известен также ситовой анализатор, содержащий корпус, набор сит и привод 2.
Недостатком этого устройства является недостаточная эффективность рассева из-за узкого диапазона возможных траекторий движения корпуса.
Целью изобретения является повышение эффективности рассева путем расширения диапазона амплитуды колебаний.
Цель достигается тем, что ситовой анализатор снабжен источником переменного тока и коммутатором, а привод содержит электромагниты, каждый из которых снабжен обмотками, подключенными к источнику переменного тока и коммутатору, причем электромагниты установлены симметрично по периметру дна корпуса, которое выполнено из диамагнитного материала.
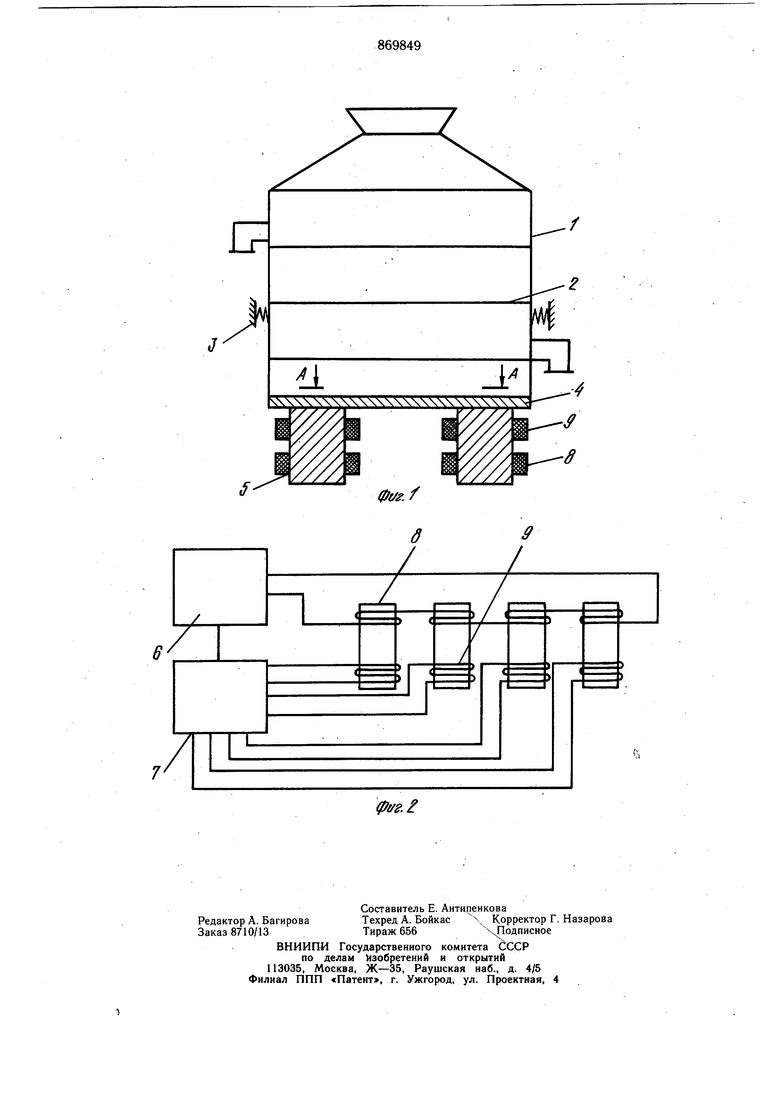
На фиг. 1 показан ситовой анализатор с частичным разрезом по линии А-А; на фиг. 2схема подключения обмоток.
10
Ситовой анализатор состоит из корпуса 1 со смонтированным в нем набором сит 2. Вокруг боковой поверхности корпуса 1 неподвижно закреплены амортизирующие пружины 3. Дно 4 корпуса выполнено из электроt5 проводного материала с электромагнитными свойствами (например, алюминия) и установлено на плоских полюсах электромагнитов 5, причем электромагниты 5 расположены симметрично по периметру дна корпуса 1. Электромагниты 5 запитываются от источника
го питания 6 и через многопрограммный коммутатор 7. При этом обмотки 8 электромагнитов 5 соединены между собой последовательно и непосредственно подключены к источнику питания 6. А обмотки 9 электромагнитов 5 соединены с выходами многопрограммного коммутатора 7, причем каждая из обмоток 9 - со своим выходом коммутатора 7. Вход коммутатора 7 соединен со своим выходом источника питания 6.
Работает ситовой анализатор следующим образом.
Корпус 1 вместе с ситамн 2 зависает над поверхностью полюсов электромагнитов 5 при подаче переменного тока от источника 6 в обмотки 8. Зависание корпуса 1 происходит вследствие взаимодействия с эффектом отталкивания переменного магнитного поля полюсов электромагнитов 5 и индуцированного переменного магнитного поля в алюминиевом дне 4 корпуса 1.
Траектория движения ситового корпуса 1 определяется программой работы обмоток 9 электромагнитов 5.
Пример 1. Колебательное движение ситового корпуса. 1 в вертикальной плоскости (данная траектория не реализуется в прототипе) создается в результате подачи импульсов переменного тока, равных по амплитуде и с нулевым сдвигом фаз между собой с выходов многопрограммного коммутатора 7 в каждую из обмоток 9 электромагнитов 5. Одновременное увеличение электромагнитного поля над полюсами электромагнитов 5 при подаче управляющих импульсов в обмотки 9 приведет к увеличению сил отталкивания корпуса 1 от полюсов электромагнитов и, следовательно, к увеличению зазора между полюсами электромагнитов 5 и дном корпуса 1 в промежуток времени, равный длительности управляющих импульсов. В мо мент времени отсутствия управляющих импульсов величина зазора под действием силы веса корпуса I уменьщится и станет мень ще, чем в положении равновесия, но не равной нулю. В крайней нижней точке положения ситового корпуса 1 на него будут действовать выталкивающая сила, появивщаяся в результате одновременной подачи следующего управляющего импульса на каждую из обмоток 9, и выталкивающая сила.
появившаяся в результате накопления потенциальной энергии корпусом 1 в магнитном поле полюсов электромагнитов 5 вследствие смещения корпуса 1 ниже положения равновесия. Под действием указанных сил ситовой корпус 1 будет перемещаться вертикально вверх до крайней верхней точки.
Далее описанный процесс движения повторяется. Пружины 3 ограничивают движение корпуса 1 в горизонтальной плоскости, возможное вследствие неидеального исполнения устройства.
Пример 2. Колебание корпуса вокруг оси, проходящей через центр дна корпуса I.
Управляющие .импульсы подаются поочередно на одну, то на другую пару обмотой 9 соседных полюсов электромагнитов 5.
В результате, противоположные края ситового корпуса 1 будут поочередно приподниматься и опускаться. От соскальзывания ситового корпуса 1 вбок его предохраняют амортизирующие пружины 3, расположенные симметрично по бокам корпуса.
Формула изобретения
симметрично по периметру дна корпуса, которое выполнено из диамагнитного материала.
Источники информации, принятые во внимание при экспертизе
№ 626840, кл. В 07 В 1/40, 1975 (прототип).
li
/
0t/. /
бff
r/
eg,l
