(54) ПРИВОД ПОДЪЕМНИКА

| название | год | авторы | номер документа |
|---|---|---|---|
| Привод подъемника | 1981 |
|
SU992379A1 |
| ПРИВОД ПОВОРОТА | 2007 |
|
RU2328442C1 |
| ЛИФТ С НЕСКОЛЬКИМИ ПРИВОДНЫМИ ЛЕНТОЧНЫМИ БАРАБАНАМИ БЕЗ ПРОТИВОВЕСА И НИЖНИМ РАСПОЛОЖЕНИЕМ ПРИВОДА | 2000 |
|
RU2171218C1 |
| ЛЕСТНИЧНЫЙ ПОДЪЕМНИК | 2019 |
|
RU2703812C1 |
| ЭКСКАВАТОР | 2011 |
|
RU2481439C2 |
| ПОДЪЕМНИК АВТОМОБИЛЕЙ | 2000 |
|
RU2169692C1 |
| ГОРНОЛЫЖНЫЙ БУГЕЛЬНЫЙ ПОДЪЕМНИК | 1999 |
|
RU2173645C2 |
| Монорельсовая транспортная система | 1987 |
|
SU1438994A1 |
| ПРИВОД ПОВОРОТА | 2006 |
|
RU2323153C1 |
| ТРАНСМИССИЯ ГУСЕНИЧНОЙ МАШИНЫ | 2003 |
|
RU2258623C1 |
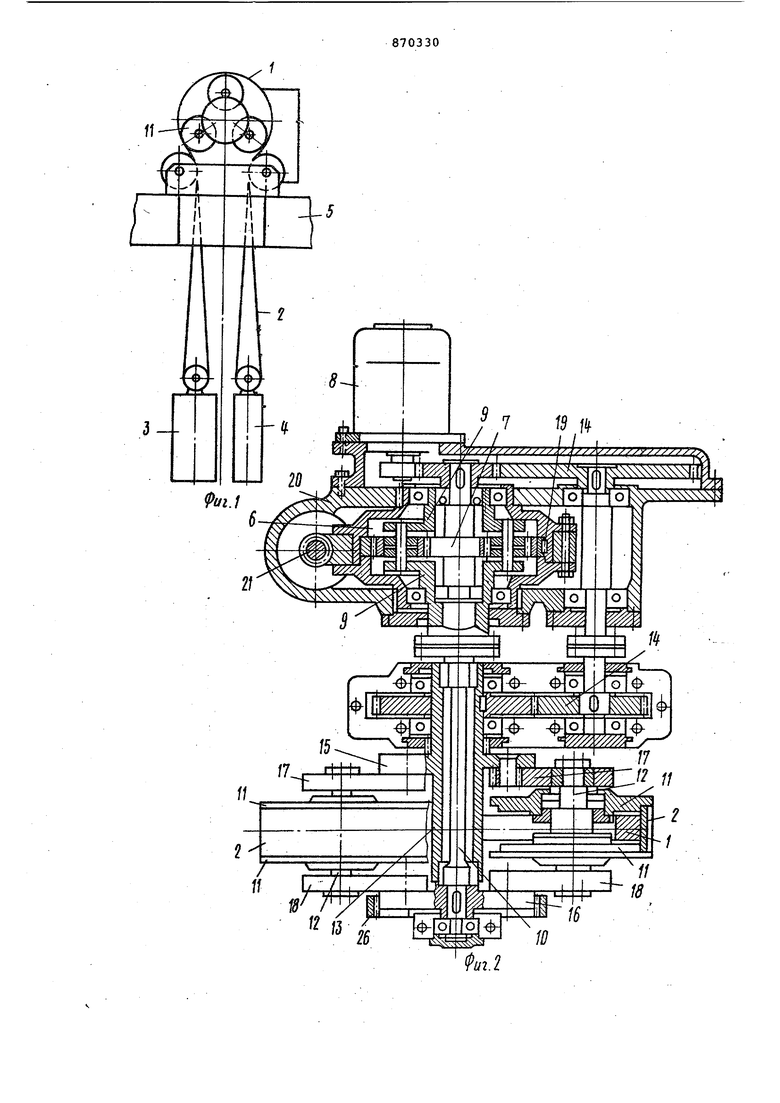
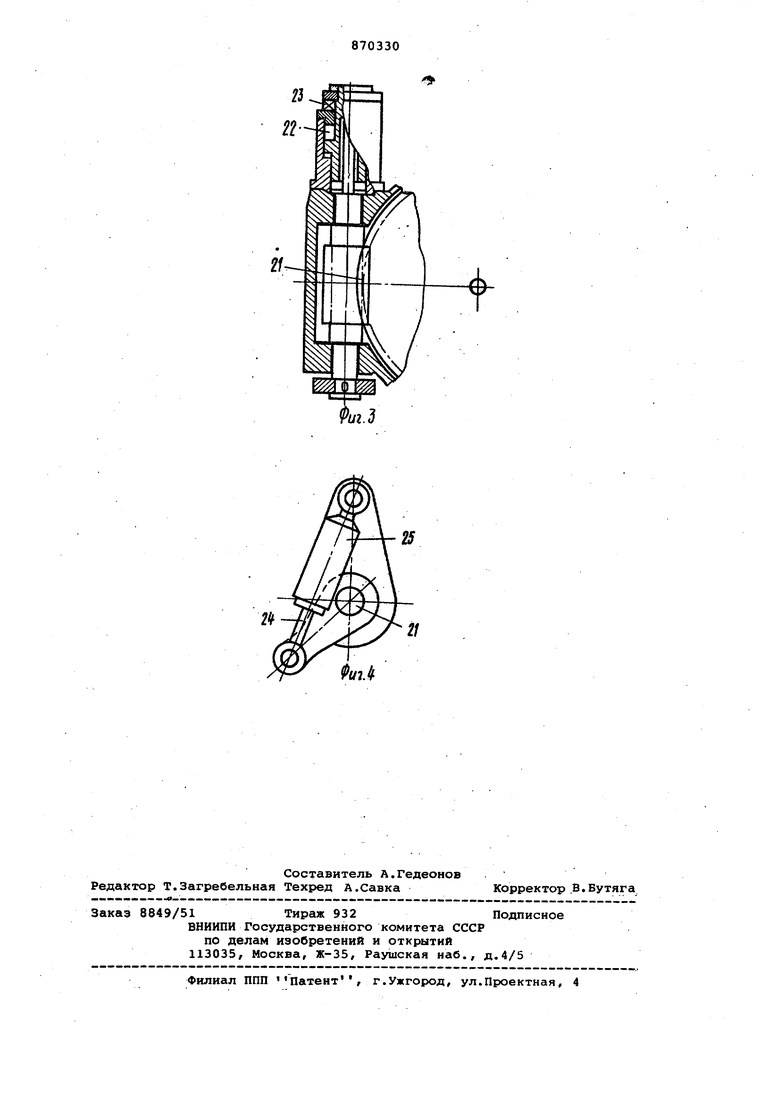
Изобретение относится к области подъемно-транспортного машиностроения, а именно к приводам подъемников Известен привод подъемника, содержащий приводной двигатель и шкив, охваченный гибким органом, связанным с подъемным сосудом и противовесомГ Известен также прийод подъемника, содержащий шкив, охваченный тяговой лентой, соединенной с подъемным сосудом и противовесом, а также планетарно-дифференциальный редуктор, установленный на опорной балке, привод ной двигатель, соединенный с солнечной шестерней редуктора, водило кото рого связано с выходным валом, и механический тормоз 2. Недостатком известных приводов является сравнительно низкая надежность. Целью изобретения является повыше ние надежности привода. Цель достигается тем,, что привод снабжен группами ведущих роликов, каждая из которых расположена на оси с двух сторон шкива, вторым выходным валом, расположенным соосно с первым валом, зубчатой передачей, .дбсредством которой второй выходной вал связан с приводным двигателем, и червячной парой с приводом, посредством которой эпициклическая шестерня редуктора соединена с корпусом редуктора, причем ось каждой группы ведущих роликов посредством поводков связана с полумуфтами выходных валов, а шкив неподвижно закреплен на опорной балке. На фиг.1 изобрс1жен привод подъемника, общий вид; на фиг.2 - редуктор привода с ведущими роликами, общий вид; на фиг.З - червячная пара привода; на фиг.4 - привод червячной пары. Привод подъемника содержит шкив 1, охваченный тяговой лентой 2, соединенной с подъемным сосудом 3 и противовесом 4. Шкив 1 неподвижно закреплен на опорной балке 5, на которой установлен планетарно-диФференциальный редуктор 6, солнечная шестерня 7 которого соединена с приводным двигателем 8, а водило 9 - с первым выходным валом ДО. Группы ведущих роликов 11 расположены на осях 12 по обе стороны шкива 1. Второй выходной вал 13 расположен соосно с валом 10 и через зубчатую передачу 14 связан с двигателем 8. Ось 12 каждой группы роликов 11 соединена с полумуфтами 15, 16 с помощью поводков 17, 18, которые шарнирно соединены с осью 12 и полумуфтами 15. 16 Эпициклическая шестерня 19 соединена Ч корпусом 20 редуктора б посредством черв:ячной пары 21 с приводом, который может состоять из гидроцилиндра 22 с зубчатой муфтой 23 и кулисы 24 с гидроцилиндром 25. Механический тормоз 26 воздействует на полумуфту 16. Привод подъемника работает следую щим образом. При неподвижной эпициклической шестерне 19 редуктора б и вращении двигателя 8 валы 10, 13 имеют одинаковую частоту вращения, при этом относительно продольной оси валов 10, 13 .вращаются и ролики 11, которые генерируют волну упругой деформации в тяговой ленте 2, что ведет к пёре мещению ленты 2 относительно неподви ного шкива 1, т.е. к подъему или опусканию сосуда 3. Скорость перемещения сосуда можно регулировать, изменяя радиус врсццения оси 12 роликов 11 относительно продольной оси валов .10, 13, для чего с помощью гидроцилиндров 25, 22 приводят во вращение червячную пару 21, при этом вращается эпициклическая шестерня 19 и частота вала 10 будет отличать ся от частоты вращения вала 13, что ведет к изменению радиуса вращения оси 12 ведущих роликов 11. При умень ,шении радиуса вращения оси 12 до некоторой величины ролики 11 перестают взаимодействовать с лентой 2, при этом сосуд 3 перестает перемещаться. Поскольку пуск и остановку сосуда 3 можно производить при вращающемся двигателе 8 за счет изменения поло-. женйя оси 12,то момент инерции двига теля 8 не влияет на работу привода. Тормоз 26 может срабатывать только при аварийном режиме или остановке подъемника на длительное время. Благодаря такой конструкции повышается надежность привода, а также обеспечивается безинерционное регулирование скорости подъемника. Формула изобретения .Привод подъемника,содержащий шкив, охваченный тяговой лентой, соединенной с подъемным сосудом и противовесом, а также планетарно-дифференциальный , установленный на опорной балке, приводной двигатель, соединенный с солнечной шестерней редуктора, водило которого связано с выходным валом,и механический тормоз, отличающийся тем, что, с целью повышения надежности привода, он снабжен группами ведущих роликов, каждая из KOTOJHJX расположена на оси с двух cj-opOH шкива, вторым выходным всшом, расположенным соосно с первым валом, зубчатой передачей, посредством которой второй выходной вал свя,зан с приводным двигателем, и ч вячной парой с приводом, посредством которой эпициклическая шестерня редуктора соединена с корпусом рйдуктора, причем ось каждой группы ведущих роликов посредством поводков связана с 1полумуфтами выходных валов, а шкив неподвижно закреплен на опорной балке. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР 508462, кл. В 66 В. 11/08, 29.11.73. 2. Авторское свидетельство СССР d 451603, кл. В 66 В 11/04, 24.07.72 (прототип).
x yXXx ygX/XyrX/Xx
щВ
