1
Изобретение относится к подъемно-транспортному оборудованию, в частности к приводам подъемников.
Известен привод подъемников, содержащий шкив обката, смонтированный в опоре, и многороликовое водило, огибаемые тяговой лентой, связанной одним концом с подъемным сосудом, а другим - с противовесом, приводной двигатель с редуктором и тормозом, соединенные с многороликовым водилом и установленные на опорной балке 1.
К недостаткам привода относится необходимость рычажйо-шарнирного крепления осей каждой группы роликов к полумуфтам выходных валов наклонными поводками, расположенными в параллельных плоскостях, что не обеспечивает достаточной жесткости и надежности крепления, а также сложность редукторной группы, включающей дифференциально-планетарный механизм с поворотной эпициклической шестерней и две параллельных зубчатых передачи, что обуславливает повышенную металлоемкость привода подъемника в целом. Кроме того, ограничена тяговая способность привода ввиду плоского контакта тяговой ленты со щкивом обката.
Цель изобретения -- упрощение конструкции и повышение надежности в работе. Поставленная цель достигается тем, что в приводе подъемника, содержащем шкив обката, смонтированный в опоре, и много5 роликовое водило, огибаемые тяговой лентой, связанной одним концом с подъемным сосудом, а другим - с противовесом, приводной двигатель с редуктором и тормозом, соединенные с многороликовым водилом и установленные на опорной балке, шкив содержит два конических диска, выполненных с валами, размещенными в опоре, а привод снабжен дополнительным шкивом, включающим два разрезных подпружиненных диска, и клиновых бесконечным ремнем, охва15 тывающим шкивы и расположенным на основном шкиве под тяговой лентой, и устройством осевого перемещения дисков шкива обката с сервоприводом, причем упомянутое водило содержит корпус и стационарно закрепленные в нем оси для роликов.
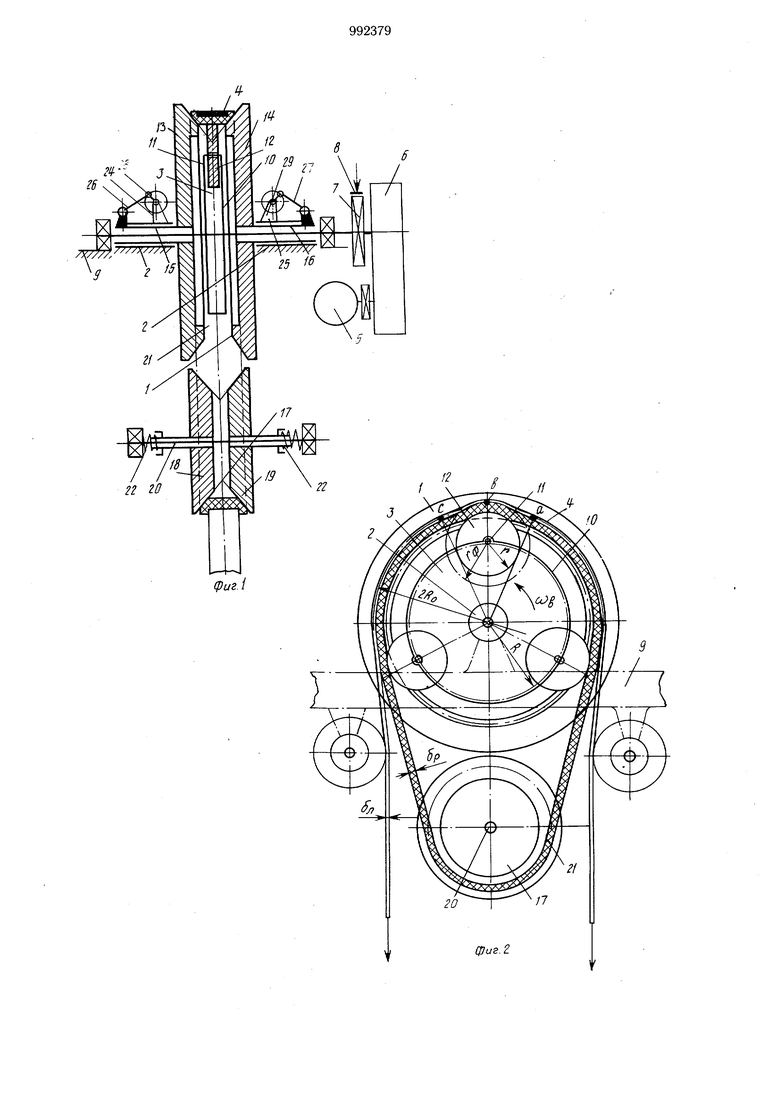
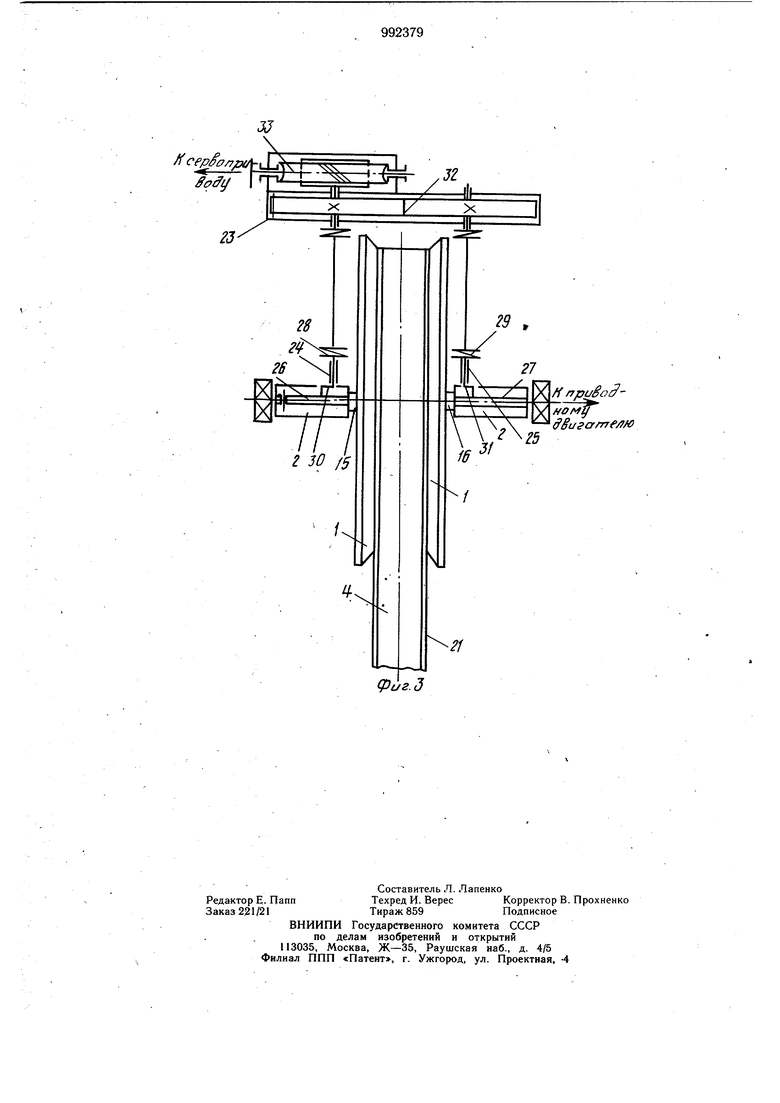
Кроме того, устройство осевого перемещения дисков щкива обката содержит два кривошипно-шатунных механизма, щатуны которых шарнирно связаны с валами дисков, а валы кривошипов кинематически соединены между собой цилиндрической зубчатой передачей с передаточным числом, равным единице, причем один из валов соединен с сервоприводом посредством червячной передачи. На фиг. 1 изображен привод подъемника, общий вид; на фиг. 2 - привод с ведущими роликами, общий вид; на фиг. 3 - кинематическая схема механизма осевого перемещения дисков щкива обката. Привод подъемника содержит щкив 1 обката с опорой 2 и многороликовое водило 3, охваченные тяговой лентой 4, соединенные с подъемным сосудом и противовесом (не показано), приводной двигатель 5 с одноступенчатым редуктором 6, соединенным с многороликовым водилом 3 муфтой 7, механический тормоз 8, установленные на опорной балке 9. Многороликовое водило 3 включает корпус 10 и стационарно закрепленные в нем оси II для установки ведущих роликов 12. Шкив 1 обката выполнен в виде двух соосных конических дисков 13 и 14 с валами 15 и 16, размещенными в опоре 2 с возможностью осевого перемещения. Шкив 1 снабжен дополнительным разрезным щкивом 17, состоящим из дисков 18 и 19, установленных на свободно вращающемся валу 20. Шкив 1 и щкив 17 охвачены клиновым бесконечным ремнем 21, к которому диски 18 и 19 постоянно поджимаются пружинами 22. Ремень 21 размещен между коническими дисками 13, 14 и тяговой лентой 4. Шкив 1 снабжен также механизмом 23 осевого перемещения дисков 13 и 14 с сервоприводом (не показан). Устройство осевого перемещения дисков шкива обката выполнено в .виде двух кривощипно-шатунных механизмов 24 и 25, шатуны 26 и 27 которых шарнирно связаны с валами 15 и 16, как с ползунами, находящимися в опоре 2. Валы 28 и 29 кривошипов 30 и 31 кинематически соединены между собой цилиндрической зубчатой передачей 32 с передаточным числом, равным единице. Вал 28 соединен с сервоприводом посредством червячной пары 33. Привод подъемника работает следующим образом. При вращении водила 3 с постоянной угловой частотой cJ от приводного двигателя 5 через ред,уктор 6, например против часовой стрелки, ведущие ролики 12 генерируют в бесконечном клиновом ремне 21 и прижатой к нему тяговой ленте 4 волну упругой деформации посредством чего происходит подъем подъемного сосуда и опускание противовеса. Это сопровождается перекатыванием ремня 21 и ленты 4 по неподвижным в окружном направлении коническим дискам 13 и 14 шкива 1 обката. При реверсе привода происходит опускание сосуда и подъем противовеса.
За один полный оборот водила 3 происходит вертикальное перемещение сосуда на высоту ЛЬ, определяемую по формуле
Ah (аЬс - ас) Z ,
(1) где аЬс - периметр гофра, образуемого оттяжкой клинового ремня 21 и ленты 4 от шкива I обката; ас-опорная дуга окружности обката с радиусом RO; Z - число ведущих роликов водила 3. Величина (аЬс - ас) зависит от соотношения радиуса Гф , радиуса расположения центров роликов 12-R, и радиуса обката RO . Радиус Гф находится из очевидного (фиг. 2). выражения гф г-0,5 (5,+ S),(2) где 5л - толщина тяговой ленты 4; SP - рабочая толщина клинового ремня 21; &р - полная толщина ремня, равная удвоенной рабочей толщине ремня;Г - рабочий радиус ведущего ролика 12. Параметры z, г, Sp, Sp , Sj,, Пр, R являются практически неизменяемыми в процессе работы привода, т. е. Z, Г, SP, SP , Sj, Гф, R constans Величина радиуса обката RQ может быть изменена осевым совместным перемещением конических дисков 13 и 14 шкива 1. Так, например, при максимальном осевом сближении этих дисков 13 и 14, т. е. при соблюдении равенства RO R - г« величина (аЬс - ас) равна нулю и при вращении водила 3 клиновой ремень 21 и тяговая лента 4 будут неподвижны. Осевое перемещение дисков 13 и 14 осуществляется от сервопривода (фиг. 3) за счет вращения червячной пары 33, зубчатой передачи 32, валов 28 и 29 и связанных с ними кривощипов 30 и 31, которые посредством щатунов 26 и 27 перемещают на нужное расстояние в осевом направлении с помощью валов 15 и 16 и сами диски 13 и 14. Соответственно дискам 13 и 14 перемещаются в осевом направлении на валу 20 подпружиненные полудиски 18 и 19 дополнительного шкива 17. Узел этого диска является как бы резервной емкостью отрезка клинового ремня 21. Шкив 17 работает вхолостую. Поскольку пуск и остановку подъемного сосуда можно производить при вращающемся приводном двигателе 5 за счет измейения осевого положения дисков 13 и 14, то момент инерции двигателя 5 не влияет на работу привода. Предлагаемое изобретение позволяет повысить тяговую способность привода, так как суммарный угол обхвата тяговой лентой 4 клинового ремня (фиг. 2) примерно равен Si и существенно превышает угол обхвата лентой неподвижного шкива технического решения, принятого за прототип. Суммарный угол обхвата клиновым ремнем 21 конических дисков 13 и 14 равен углу обхвата лентой неподвижного шкива устройства, принятого за прототип. Однако сила сцепления клинового ремня с коническими дисками значительно выше, чем плоской ленты с цилиндрическим шкивом в 2- 3 раза. Соответственно выше и тяговая способность предлагаемого привода подъемника по сравнению с прот.отипом, а также безопасность работы. Кроме того, установка роликов 12 на стационарных осях повышает жесткость и надежность этого весьма ответственного узла привода подъемника. Использование механизма осевого перемещения конических дисков шкива обката для регулирования скорости обеспечивает упрощение редукторной группы привода и снижает его металлоемкость. Формула изобретения 1. Привод подъемника, содержащий шкив обката, смонтированный в опоре и многороликовое водило, огибаемые тяговой лентой, связанной одним концом с подъемным сосудом, а другим - с противовесом, приводной двигатель с редуктором и тормозом, соединенные с многороликовым водилом и установленные на опорной балке, отличающийся тем, что, с целью упрощения конструкции и повышения надежности в работе, шкив содержит два конических диска, выполненных с валами, размещенными в опоре, а привод снабжен дополнительным шкивом, включающим два разрезных подиружиненных диска, и клиновым бесконечным ремнем, охватывающим шкивы и расположенным на основном щкиве под тяговой лентой, и устройством осевого перемещения дисков шкива обката с сервоприводом, причем упомянутое водило содержит корпус и стационарно закрепленные в нем оси для роликов. 2. Привод по п. 1, отличающийся тем, что устройство осевого перемещения дисков шкива содержит два кривошипно-шатунных механизма, шатуны которых шарнирно связаны с валами дисков, а валы кривошипов кинематически соединены между собой цилиндрической зубчатой передачей с передаточным числом, равным единице, причем один из валов соединен с сервоприводом посредством червячной передачи. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 870330, кл. В 66 В 11/06, 1978 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод подъемника | 1983 |
|
SU1216120A1 |
| Волновой вариатор скорости для привода двухвалковой дробилки | 1980 |
|
SU933108A1 |
| Привод шпинделя для вибрационного резания | 1980 |
|
SU933293A1 |
| Ленточно-шлифовальный станок | 1978 |
|
SU751591A2 |
| Привод для преобразования непрерывного вращательного движения в импульсивное вращение | 1989 |
|
SU1664672A2 |
| СИСТЕМА И СПОСОБ УМЕНЬШЕНИЯ ШУМА ОТ РЕМНЯ | 2011 |
|
RU2596043C9 |
| Привод для преобразования непрерывного вращательного движения в импульсивное вращение | 1984 |
|
SU1239043A1 |
| Волновая ременная передача | 1979 |
|
SU898183A1 |
| Привод подъемника | 1979 |
|
SU870330A1 |
| МНОГОКАНАТНАЯ ПОДЪЕМНАЯ УСТАНОВКА | 1999 |
|
RU2184695C2 |