(54) ЗОНД ДЛЯ ИЗМЕРЕНИЯ МАГНИТНОЙ ИНДУКЦИИ
I
Изобретение относится к магнитомет рии и может быть использовано при измерении магнитной индукции в ферромагнитных каркасах железобетонных изделий и конструкций, арматура которых перед сборкой каркаса подвергалась магнитной обработке.
Известен зонд для измерения магнитной индукции Ul .Известнь1й зонд содержит датчик Холла в виде кристалла сложной конфигурации, имеющего два измерительных плеча, причем три напряжеяия Холла снимаются с измерительных плеч (два напряжения с первого плеча кристалла, третье напряжение со второго плеча кристалла), что позволяет измерить три составлякнцие вектора магнитной индукции. Такая конструкция зонда со сложной конфигурацией измерительного кристалла обладает рядом недостатков, к которым следует отнести отсутствие возможности регулировать чувствительность по осям и трудоемкость изготовления.
Наиболее близок к предлагаемому является зонд для измерения магнитной индукции Г2 .
Этот зонд содержит три датчика Холла, оси чувствительности которых взаимно перпендикулярны.
Зонд позволяет определять составляющие вектора магнитной индукции.
Однако заранее заданное расположение датчиков Холла не позволяет с достаточ10ной точностью установить величину и направление составл1пощих магнитной индукции в ферромагнитных каркасах железобетонных конструкций, прошедших предварительную магнитную обработку.
IS
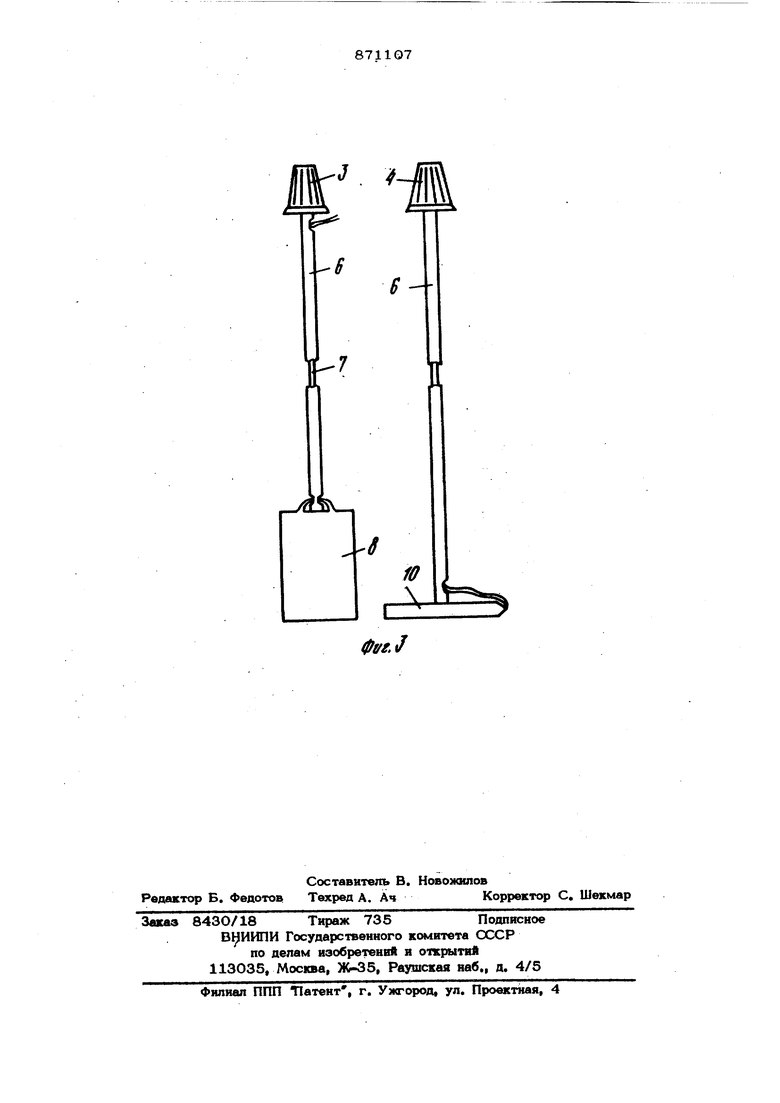
С целью повьпиения точности измерения магнитной индукции зонд, содержащий три датчика Холла, снабжен корпусом из неферромагнитного материала с тремя сквозными направляющими, в которых разме20щены, с возможностью вращения, трубки из неферромагнитного материала, внутри которых расположены провода питания датчиков Холла, закрепленных на концах 3 трубок, при этом дв% датчика Холла параллельны продольной оси корпуса, а третий перпендикулярен этой оси, Концевое сечение сквозных направляк щих выполнено кольцевым, а корпус вы полнен с отдельными клеммами подключения электропитания к каждому датчику Холла. На фиг. 1, 2 изображен общий вид зон да для измерения магнитных индукций; на фиг, 3 отдельно показаны датчики Холла, К корпусу 1 из неферромагнитного материала крепится клеммник 2, а на крыше корпуса расположены головки 3-5, к которым крепятся трубки 6 из неферрома нитного материала, внутри которых проложены цепи питания 7, подсоединенные к измерительным элементам - датчикам Холла 8-1О, Непи питания 7 подсоединены к клеммнику 2, к которому подводится электрическая энергия от источника питания с регулируемыми электрическими параметрами, В корпусе имеются продольные сквозные направляющие 11 - 13. Магнитную индукцию в ферромагнитных каркасах железобетонных конструкций или изделий, арматура которых была подвергнута предварительной магнитной обработке, измеряют следующим образом. Корпус 1 вводят в пространство между рядами арматуры. После этого в направляющие 11-13 корпуса вставляют датчики Холла 8 - 10, укрепленные на трубках 6, внутри которых расположены цепи питания 7 датчиков, подсоединенные к клеммнику 2, расположенному на корпусе 1. Трубки 6 заканчиваются головками 3 - 5, при вращении которых датчики Холла, 8 - 10, перемещаясь в конпевых кольцевых сечениях направляющих 11-13 позволяют настроить измерительное устро ство для измерения магнитной индукции, состоящее из трех датчиков Холла, в направлении расположения основной составляющей вектора магнитной индукции. После измерения и определения направ ления и величины основной составляющей вектора магнитной индукции и сопоставле 7 ;ния ее с остальными двумя составляющими вектора магнитной индукции становится возможным решить вопрос о совмещении расчетной плоскости ( плоскости, в которой прилагается нагрузка к изделию или конструкции) с плоскостью магнитного поля. Если составляющие вектора магнитной индукции сильно отл1гчаются друг от друга, необходимо изменить чувствительность соответствующих датчиков Холла. Зонд для измерения магнитной индукции позволяет определить составляющие вектора магнитной индукции в любой точке стесненного пространства сложного магпитного ПОЛЯ, какое в преобладающем большинстве случаев создается пучками предварительно намагниченной арматуры, составляющей ферромагнитный каркас железобетонного изделия или конструкции. Формулаизобретения 1.Зонд для измерения магнитной ин-р дукции, составляющий три датчика Холла, отличающийся тем, что, с целью повыщения точности, он снабжен корпусом из неферромагнитного-материала с тремя сквозными направляющими, в которых размещены с возможностью вращения трубки из неферромйгнитного .материала, внутри которых расположены провода питания датчиков Холла, закрепленных на концах трубок, при этом два датчика Холла параллельны продольной оси корпуса, а третий перпендикулярен к этой оси. 2.Зонд по п, 1, о т л и ч а ю щ и йс я тем, ЧТО концевое сечение направляющих вьтолнено кольцевым, .а корпус вьшолнен с отдельными клеммами подключения элeкtpoпитaния к каждому датчику Холла. Источники информации, принятые во внимание при экспертизе 1. Патент ЧССР N9 99869, кл. 21е, 12, 1961, 2rNuctear ihs-brumenis and mefhodsj 1972, №1, 105,c. 97-101 (прототип).
/ /
Фп.г
, 4
| название | год | авторы | номер документа |
|---|---|---|---|
| Тактильный сенсор | 1990 |
|
SU1781029A1 |
| Тактильный датчик | 1986 |
|
SU1323379A1 |
| Зонд для измерения магнитной восприимчивости жидких и сыпучих сред | 1982 |
|
SU1027660A1 |
| Магнитоанизотропный датчик механических усилий | 1986 |
|
SU1318810A1 |
| ЗОНД ДЛЯ ИЗМЕРЕНИЯ ВНУТРИБРЮШНОГО ДАВЛЕНИЯ | 2017 |
|
RU2648207C1 |
| Цифровой измеритель переменной магнитной индукции | 1982 |
|
SU1075203A1 |
| ЭЛЕКТРОМАГНИТНАЯ СИСТЕМА | 2023 |
|
RU2816442C1 |
| Устройство для исследования топографии магнитных полей | 1977 |
|
SU746351A1 |
| УСТРОЙСТВО для ИЗМЕРЕНИЯ ИНДУКЦИИ | 1971 |
|
SU309323A1 |
| Способ измерения механических напряжений | 1980 |
|
SU949356A1 |

fO
