налов производится матрицей элементов Холла, расположенных на второй пластине в зазоре между этой пластиной и каркасом при перемещении стержней в магнитной системе.
Однако данная конструкция имеет недостаточную надежность определения процесса контактирования с поверхностью предмета произвольной формы в условиях проскальзывания. Так, из-за того, что выступающие на поверхность стержни имеют ци- линдрическую форму в случае контактирования с предметом сложной формы возможно не только утапливание стержней, но и их изгиб при тангенциальных относительно поверхности датчика уси- лиях. Последнее имеет место при проскальзывании предмета. Кроме того, предмет острыми частями, например углом, может цепляться за выступающие стержни Силовые воздействия на стержни могут приводить к заклиниванию последних, изменению рабочих характеристик датчика.
Цель изобретения - повышение надежности регистрации процесса контактирования с поверхностью предмета произвольной формы, в том числе проскальзывающего предмета.
Это достигается тем, что в тактильной сенсорной матрице магнитная система выполнена в виде одного большого цилиндрического магнита и ферромагнитной пластины, расположенных параллельно друг другу с зазором, а также штоков, выполненных на основе постоянных магнитов в форме миниатюрных цилиндров, обращенных одноименными полюсами к такому же полюсу большого магнита с прикрепленными к ним неферромагнитными частями в виде полусфер, выступающих над пластиной, причем каркас выполнен из неферромагнитного материала и устаноален между большим магнитом и пластиной, имеюа1ей с каркасом соосные отверстия для размещения штоков, а магниточувствительные элементы выполнены на основе пленки магнитомягкого материала, например пермаллоя, функционируют на планарном эффекте Холла и расположены в плоскостях, проходящих через оси симметрии большого магнита и каждого из штоков в окрестности точек, где составляющая вектора индукции магнитного поля, параллельная оси симметрии штока, обращается в нуль.
Сопоставительный анализ с прототипом показывает, что предлагаемая тактильная сенсорная матрица отличается тем, что магнитная система выполнена в виде одного большого цилиндрического магнита и ферромагнитной пластины, расположенных
параллельно друг другу с зазором, а также штоков, выполненных на основе постоянных магнитов в форме миниатюрных цилиндров, обращенных одноименными
полюсами к такому же полюсу большого магнита, с прикрепленными к ним неферромагнитными частями в виде полусфер, выступающих над пластиной, причем каркас выполнен из неферромагнитного материала
и установлен между большим магнитом и пластиной, имеющей с каркасом соосные отверстия для размещения штоков, а магниточувствительные элементы выполнены на основе пленки магнитомягкого материала
(например, пермаллоя), функционируют на планарном эффекте Холла и расположены в плоскостях, проходящих через оси симметрии большого магнита и каждого из штоков в окрестности точек, где составляющая вектора индукции магнитного поля, параллельная оси симметрии штока, обращается в нуль.
Магнитная система выполнена в виде одного большого цилиндрического магнита
и ферромагнитной пластины, расположенных параллельно друг другу с зазором, а также штоков, выполненных на основе постоянных магнитов в форме миниатюрных цилиндров, обращенных одноименными полюсами к такому же полюсу большого магнита с прикрепленными к ним неферромагнитными частями в виде полусфер, выступающих над пластиной, причем каркас выполнен из неферромагнитного материала и установлен между большим магнитом и пластиной, имеющей с каркасом соосные отверстия для размещения штоков, а магниточувствительные элементы выполнены на основе пленки магнитомягкого материала (например, пермаллоя), функционируют на планарном эффекте Холла и расположены в плоскостях, проходящих через оси симметрии большого магнита и каждого из штоков в окрестности точек,
где составляющая вектора индукции магнитного поля, параллельная оси симметрии штока, обращается в нуль.
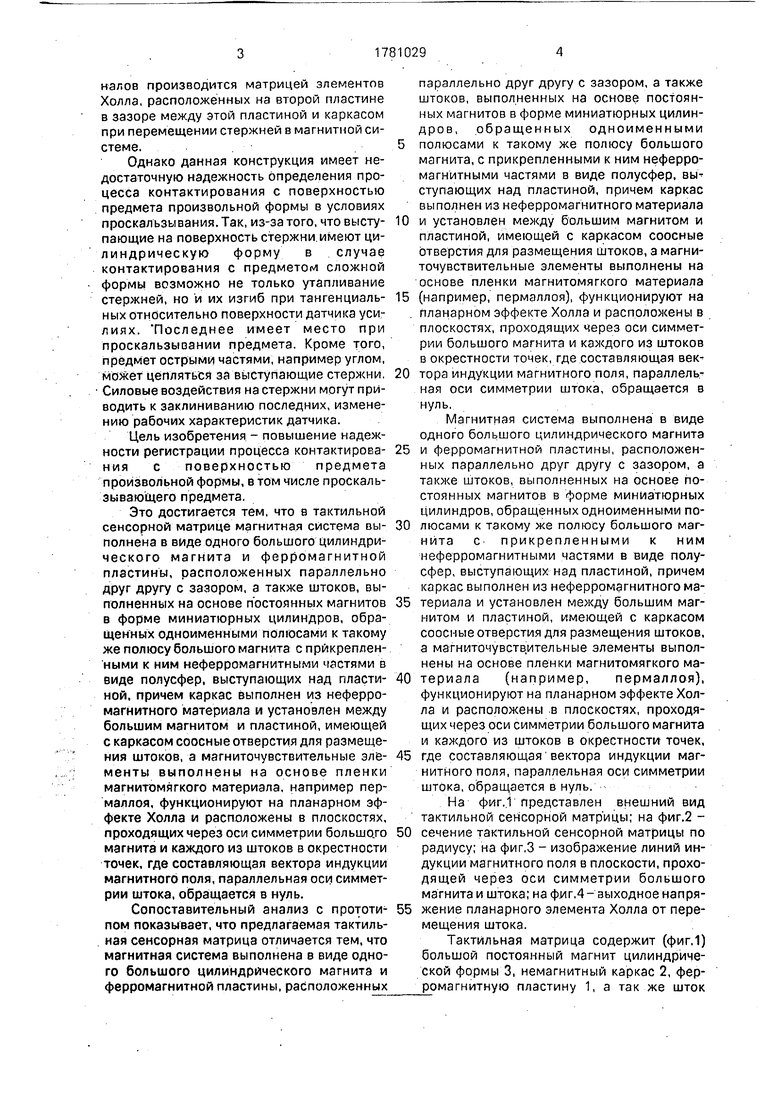
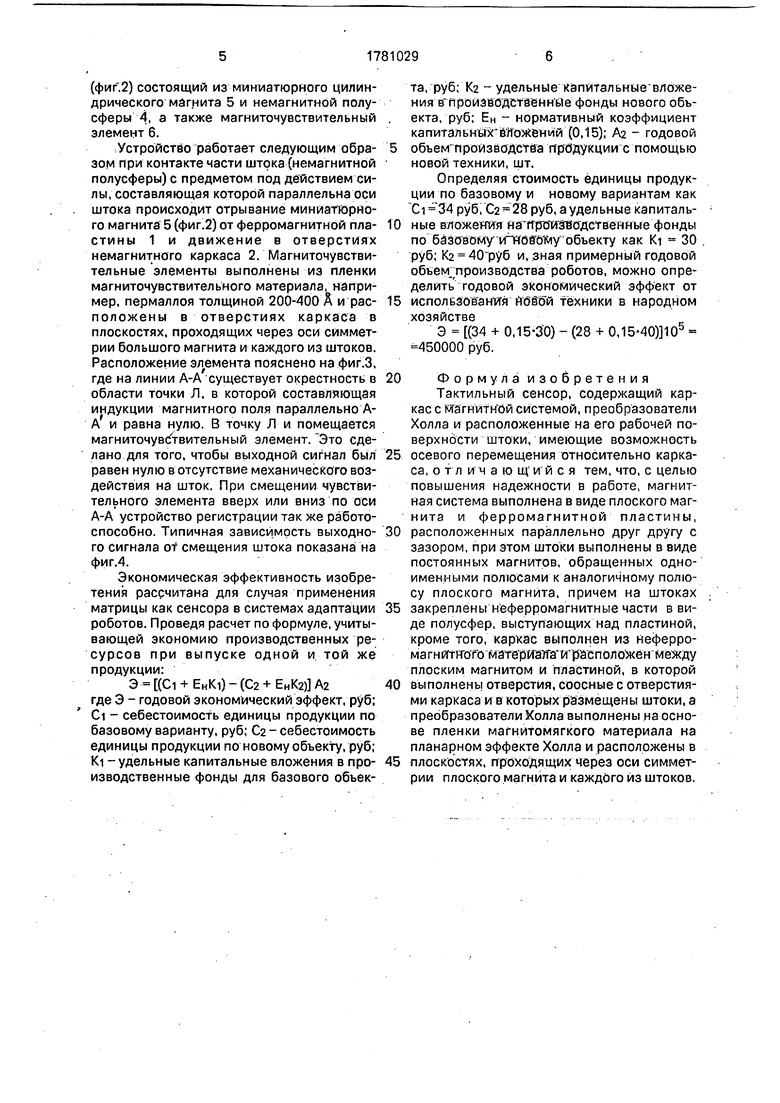
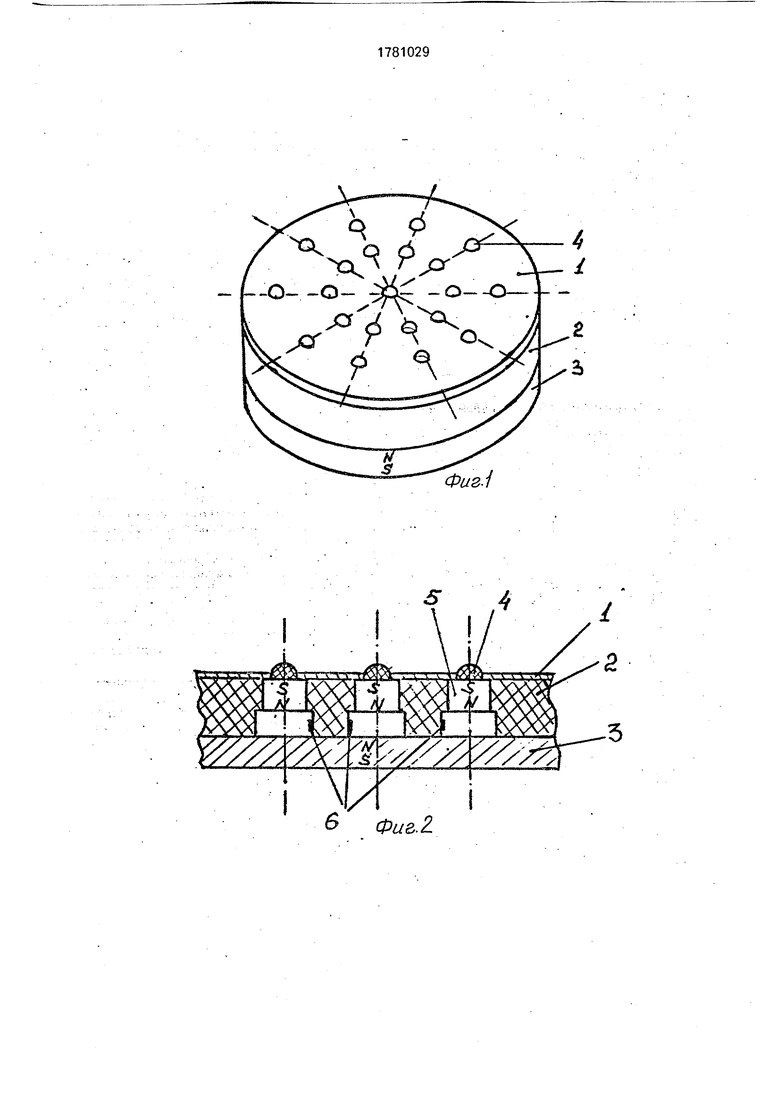
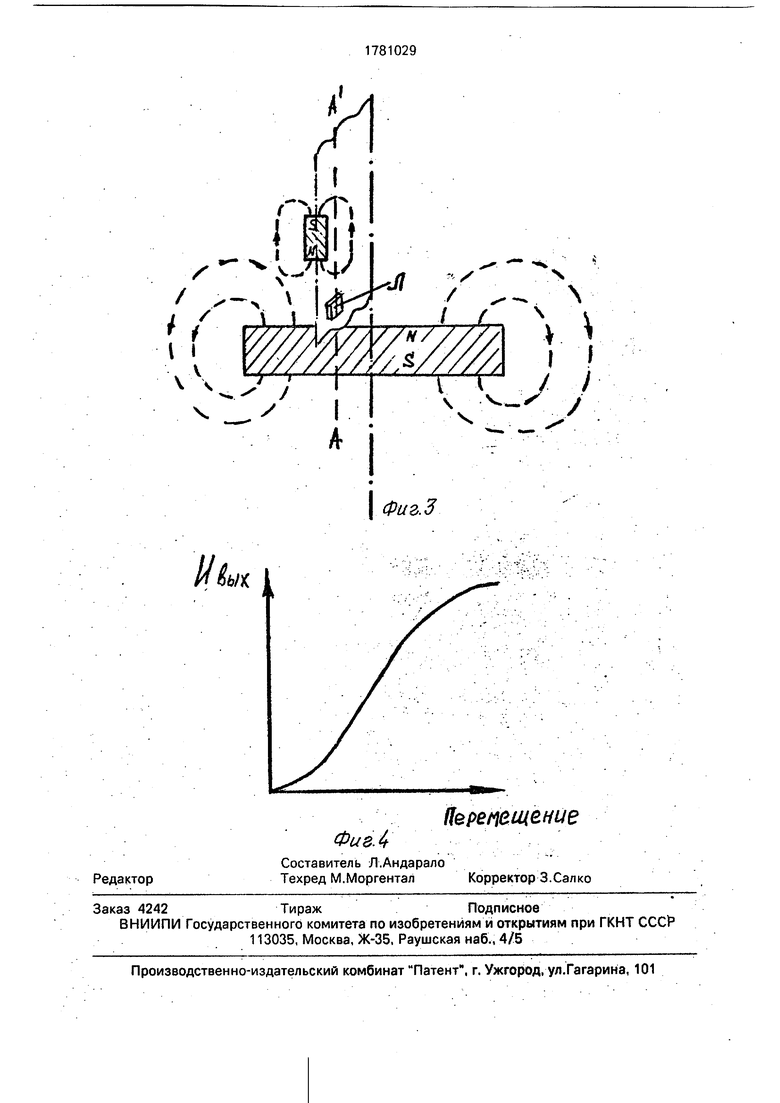
На фиг.1 представлен внешний вид тактильной сенсорной матрицы; на фиг.2 сечение тактильной сенсорной матрицы по радиусу; на фиг.З - изображение линий индукции магнитного поля в плоскости, проходящей через оси симметрии большого магнита и штока; на фиг,4- выходное напряжение планарного элемента Холла от перемещения штока.
Тактильная матрица содержит (фиг,1) большой постоянный магнит цилиндрической формы 3, немагнитный каркас 2, ферромагнитную пластину 1, а так же шток
(фиг,2) состоящий из миниатюрного цилиндрического магнита 5 и немагнитной полусферы 4, а также магниточувствительный элемент б.
Устройстёо работает следующим образом при контакте части штока (немагнитной полусферы) с предметом под действием силы, составляющая которой параллельна оси штока происходит отрывание миниатюрного магнита 5 (фиг.2) от ферромагнитной пластины 1 и движение в отверстиях немагнитного каркаса 2. Магниточувстви- тельные элементы выполнены из пленки магниточувствительного материала, например, пермаллоя толщиной 200-400 А и расположены в отверстиях каркаса в плоскостях, проходящих через оси симметрии большого магнита и каждого из штоков. Расположение элемента пояснено на фиг.З, где на линии А-А существует окрестность в области точки Л, в которой составляющая индукции магнитного поля параллельно А- А и равна нулю. В точку Л и помещается магниточувствительный элемент. Это сделано для того, чтобы выходной сигнал был равен нулю в отсутствие механического воздействия на шток. При смещении чувствительного элемента вверх или вниз по оси А-А устройство регистрации так же работоспособно. Типичная зависимость выходного сигнала от смещения штока показана на фиг.4.
Экономическая эффективность изобретения рассчитана для случая применения матрицы как сенсора в системах адаптации роботов. Проведя расчет по формуле, учитывающей экономию производственных ресурсов при выпуске одной и той же продукции:
Э (Ci + EHKi) - (С2 + Е„К2) А2 где Э - годовой экономический эффект, руб; Ci - себестоимость единицы продукции по базовому варианту, руб; С2 - себестоимость единицы продукции по новому объекту, руб; Ki -удельные капитальные вложения в производственные фонды для базового объекта, руб, К2 - удельные капитальные вложения в производственные фонды нового объекта, руб; Ен - нормативный коэффициент капитальных вяожений (0,15); AZ - годовой
объем производства продукции с помощью новой техники, шт.
Определяя стоимость единицы продукции по базовому и новому вариантам как Ci 34 руб, С2 28 руб, а удельные капитальные вложешя на п ршз водственные фонды по базовому иПн Ов о му объекту как Ki 30 руб; К2 40 руб и, зная примерный годовой объем, производства роботов, можно определить годовой экономический эффект от
использования техники в народном хозяйстве
Э (34 + 0,15-30) - (28 + 0,15-40)3105 - 450000 руб.
Формула изобретения
Тактильный сенсор, содержащий каркас с магнитной системой, преобразователи Холла и расположенные на его рабочей поверхности штоки, имеющие возможность
осевого перемещения относительно каркаса, отличающийся тем, что, с целью повышения надежности в работе, магнитная система выполнена в виде плоского маг- нита и ферромагнитной пластины,
расположенных параллельно друг другу с зазором, при этом штоки выполнены в виде постоянных магнитов, обращенных одноименными полюсами к аналогичному полюсу плоского магнита, причем на штоках
закреплены неферромагнитные части в виде полусфер, выступающих над пластиной, кроме того, каркас выполнен из неферро- магнитного матерйашагй расположен между плоским магнитом и пластиной, в которой
выполнены отверстия, соосные с отверстиями каркаса и в которых размещены штоки, а преобразователи Холла выполнены на основе пленки магнитомягкого материала на планарном эффекте Холла и расположены в
плоскостях, проходящих через оси симметрии плоского магнита и каждого из штоков.
Фиг-i
| название | год | авторы | номер документа |
|---|---|---|---|
| Тактильный датчик | 1986 |
|
SU1323379A1 |
| Бесконтактный датчик линейных перемещений | 1990 |
|
SU1786545A1 |
| ДАТЧИК ДЛЯ РЕГИСТРАЦИИ ФЕРРОМАГНИТНОГО ОБЪЕКТА | 2005 |
|
RU2284527C1 |
| СПОСОБ НЕРАЗРУШАЮЩЕГО КОНТРОЛЯ ПЛОЩАДИ ПОПЕРЕЧНОГО СЕЧЕНИЯ И ОБНАРУЖЕНИЯ ЛОКАЛЬНЫХ ДЕФЕКТОВ ПРОТЯЖЕННЫХ ФЕРРОМАГНИТНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2204129C2 |
| Бесконтактный датчик тока | 1990 |
|
SU1824603A1 |
| Тактильный датчик | 1988 |
|
SU1565687A1 |
| ВНУТРИТРУБНЫЙ СНАРЯД-ДЕФЕКТОСКОП С ОДОМЕТРАМИ | 2005 |
|
RU2306479C2 |
| Бесконтактная клавиша | 1990 |
|
SU1791810A1 |
| Устройство выявления микромагнитных частиц в материале сварного шва сталей аустенитного класса | 2024 |
|
RU2829469C1 |
| ВИБРОДАТЧИК | 2013 |
|
RU2535646C2 |
/
ч
Ч
Hi
б/К
| Фиг.З
