Изобретение относится к робототехнике и может быть использовано в качестве датчика тактильного ощущения предмета, зажатого в схвате робота.
Целью изобретения является повыше- кие надежности работы тактильного датчика и упрощение его конструкции.
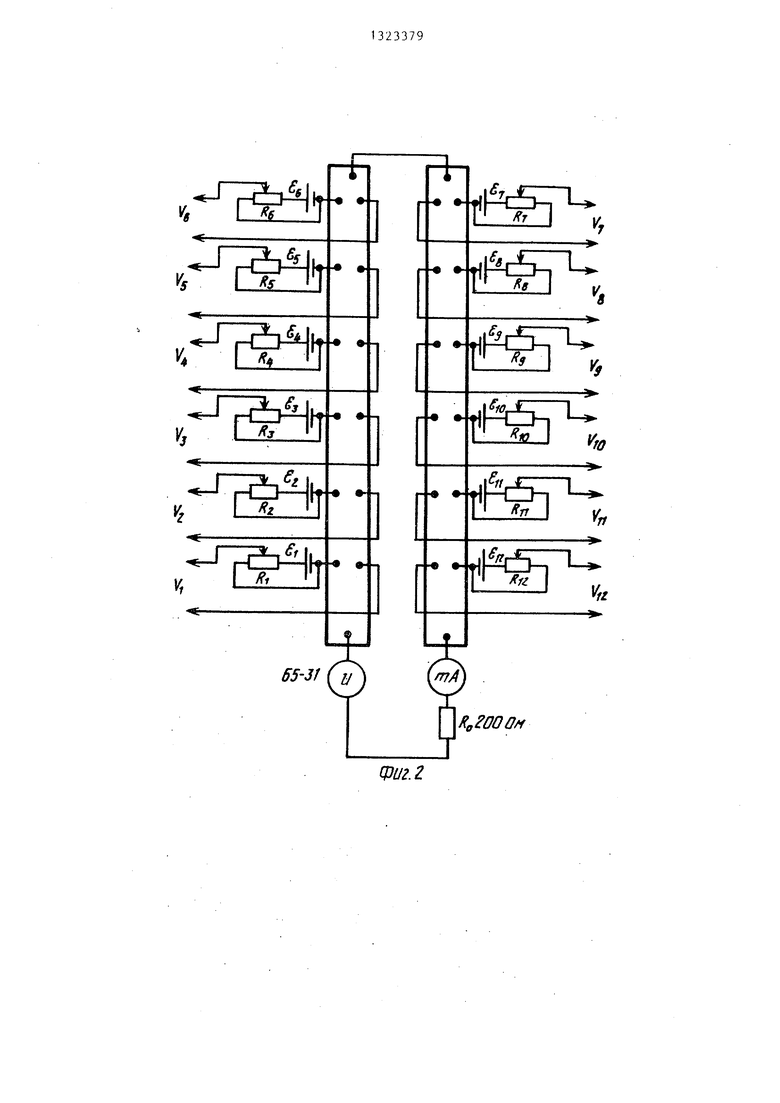
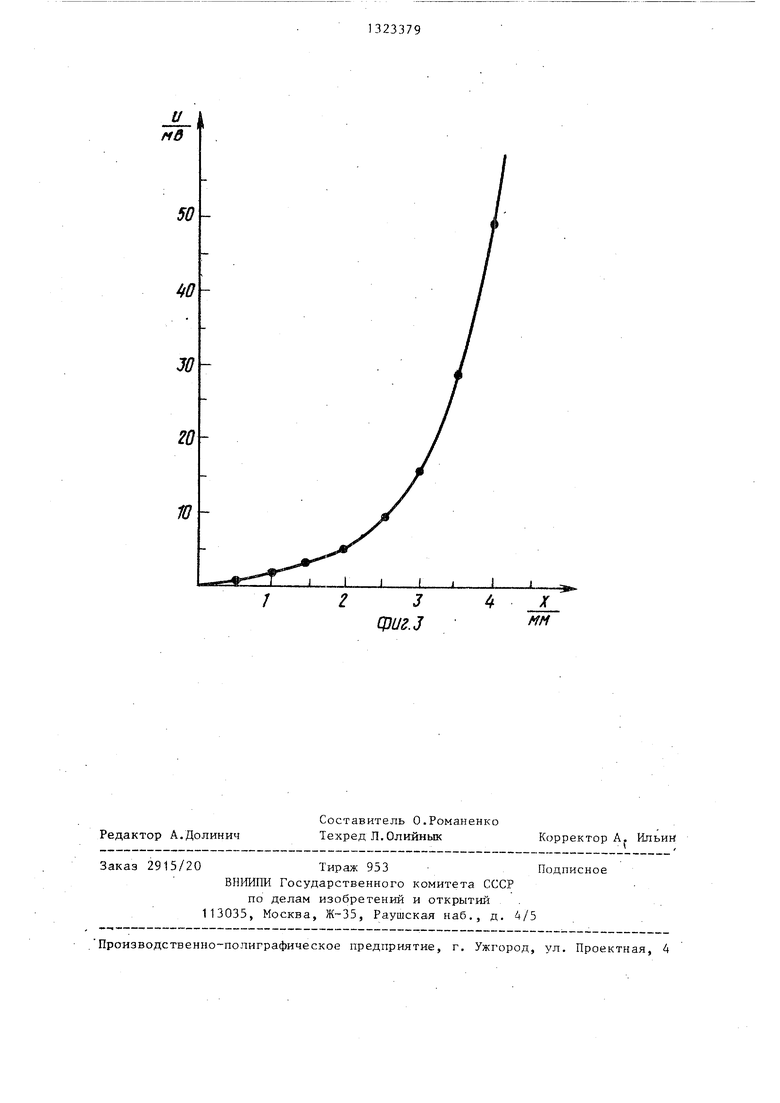
На фиг.1 изображен тактильный датчик j общий вид; на фиг.2 - схема матрицы элементов Холла; на фиг.З - зависимость сигнала на элементе Холла от смещения стержня тактильного датчика.
Датчик состоит из магнитной системы, включающей в себя два постоянных магнита 1, верхний 2 и нижний 3 магнитопроводы (ферромагнитные пластины) . Магнитопровод 2 имеет отверстия, количественно соответствующие
числу стержней 4, которые имеют воз- 20 Щ и и с я тем, что, с целью упроще- можность осевого перемещения магнито- провода и неферромагнитного каркаса 5. Возврат в исходное состояние каждого стержня достигается благодаря возвратной пружине 6. В зазоре магнитной системы непосредственно под стержнями помещена матрица элементов Холла 7. Стержни 4 выполнены из ферромагнитного материала и являются частью магнитной системы.30
Датчик работает следующим образом.
Давление предмета на стержни 4 тактильного датчика вызывает и;с перемещение относительно верхнего магни- топровода 2 и каркаса 5.. Это перемещение вызывает изменение индукции магнитного поля в зазоре между нижним магнитопроводом 3 и стержнями. Р1зме- нение индукции регистрируется матрицей элементов Холла,
ния конструкции и повыщения надежности работы, магнитная система выполнена в виде двух ферромагнитных пластин, установленных с зазором парап25 лельно друг другу, двух постоянных магнитов, направленных одноименными полюсами в одну сторону и расположенных и зазоре между пластинами, а также стержней, выполненных из ферромагнитного материала, причем каркас выполнен, из неферромагнитного материала и установлен между магнитами, в одной из пластин и в каркасе сделаны соос- ные отверстия, в которых установлены
35 стержни, подпружиненные относительно каркаса, а матрица элементов Холла расположена на второй пластине в зазоре между этой пластиной и каркасом с возможностью магнитного взаимодей40 ствия со стержнями.
Матрица элементов Холла может быть выполнена обычными методами планар- ной технологии и имеет небольшие размеры чувствительных областей - не более чем 0,5 X 0,5 мм. Ток к элементам Холла подводится по двум проводникам. В измерительную цепь каждого элемента Холла, содержащегося в матрице, включается компенсатор, позволяющий настроить каждый элемент Холла на нулевой уровень сигнала в верхнем положении стержней.
Формула изобретения Тактильный датчик, содержащий каркас с магнитной системой, матрицу элементов Холла и расположенные на его рабочей поверхности стержни, имеющие возможность осевого перемещения относительно каркаса, отличаю20 Щ и и с я тем, что, с целью упроще- 30
ния конструкции и повыщения надежности работы, магнитная система выполнена в виде двух ферромагнитных пластин, установленных с зазором парап25 лельно друг другу, двух постоянных магнитов, направленных одноименными полюсами в одну сторону и расположенных и зазоре между пластинами, а также стержней, выполненных из ферромагнитного материала, причем каркас выполнен, из неферромагнитного материала и установлен между магнитами, в одной из пластин и в каркасе сделаны соос- ные отверстия, в которых установлены
35 стержни, подпружиненные относительно каркаса, а матрица элементов Холла расположена на второй пластине в зазоре между этой пластиной и каркасом с возможностью магнитного взаимодей40 ствия со стержнями.
65-31 (и
к„гооон
фиг. 2
и
MB
50
0
30
20
Ю
| название | год | авторы | номер документа |
|---|---|---|---|
| Тактильный сенсор | 1990 |
|
SU1781029A1 |
| Тактильный датчик | 1988 |
|
SU1565687A1 |
| Бесконтактный датчик линейных перемещений | 1990 |
|
SU1786545A1 |
| Преобразователь линейных перемещений | 1986 |
|
SU1663395A1 |
| ДАТЧИК ДЛЯ РЕГИСТРАЦИИ ФЕРРОМАГНИТНОГО ОБЪЕКТА | 2005 |
|
RU2284527C1 |
| Устройство для изготовления магнитных форм | 1989 |
|
SU1719147A1 |
| СПОСОБ НЕРАЗРУШАЮЩЕГО КОНТРОЛЯ ПЛОЩАДИ ПОПЕРЕЧНОГО СЕЧЕНИЯ И ОБНАРУЖЕНИЯ ЛОКАЛЬНЫХ ДЕФЕКТОВ ПРОТЯЖЕННЫХ ФЕРРОМАГНИТНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2204129C2 |
| Дискретный преобразователь угла поворота | 1990 |
|
SU1768951A1 |
| Устройство намагничивания для средств неразрушающего контроля длинномерных изделий | 2019 |
|
RU2702809C1 |
| Бесконтактная клавиша | 1990 |
|
SU1791810A1 |
Изобретение относится к области робототехники. Цель изобретения - упрощение конструкции и повьппение надежности работы. Датчик содержит магнитную систему, включающую в себя две ферромагнитные пластины 2 и 3, установленные с зазором друг к другу, два постоянных магнита 1, расположенных в зазоре между пластинами, и ферромагнитные стержни 4, установленные с возможностью осевого перемещения в пластине 2 и неферромагнитном каркасе 5 и подпружиненные относительно -последнего с помощью пружин 6, а также матрицу элементов Холла 7. Перемещение стержней 4 при взаимодействии с объектом манипулирования вы- . зывает изменение индукции магнитного поля в зазоре между пластиной 3 и стержнями, которое регистрируется матрицей элементов Холла 7, 3 ип. S (/) фиг.1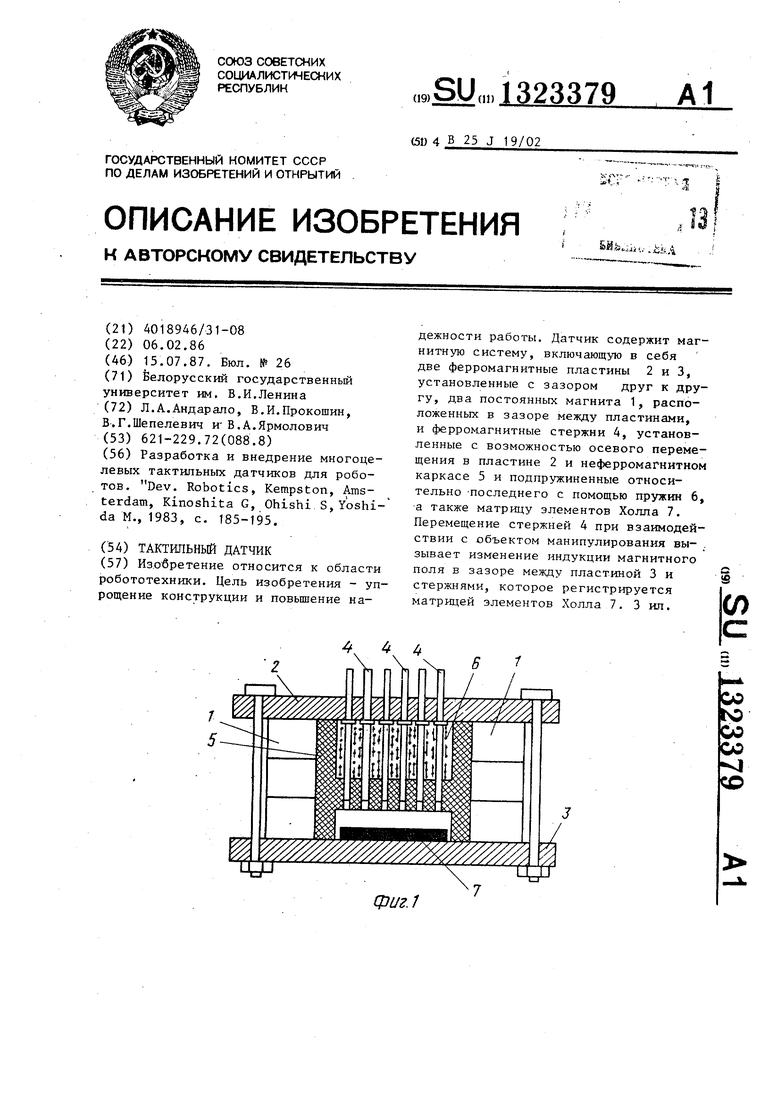
Редактор А.Долинич
Составитель О.Романенко Техред Л.Олийнык
Заказ 2915/20Тираж 953 Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб,, д. 4/5
Производственно-полиграфическое предприятие, г, Ужгород, ул. Проектная, 4
Корректор А. Ильин
| Разработка и внедрение многоцелевых тактильных датчиков для роботов | |||
| Dev | |||
| Robotics, Kempston, Amsterdam, Kinoshita G, Ohishi S,Yoshi- da M., 1983, c | |||
| Способ укрепления под покрышкой пневматической шины предохранительного слоя или манжеты | 1917 |
|
SU185A1 |
