(54) СПОСОБ ФОРМИРОВАНИЯ СИГНАЛОВ ДЛЯ РАСПОЗНАВАНИЯ РАСТЕНИЙ И ДРУГИХ НЕОДНОРОДНОСТЕЙ
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ контроля качества уборки корнеклубнеплодов | 1979 |
|
SU942614A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ НАЛИЧИЯ И/ИЛИ ХАРАКТЕРИСТИК ОБЪЕКТА ИЛИ ЕГО СОСТАВЛЯЮЩИХ, ПРЕИМУЩЕСТВЕННО ДЛЯ ОБЪЕКТОВ СЕЛЬСКОХОЗЯЙСТВЕННОГО НАЗНАЧЕНИЯ | 1994 |
|
RU2066521C1 |
| Способ распознавания корнеклубнеплодов на фоне почвы | 1981 |
|
SU954008A1 |
| Способ формирования сигналов для распознавания растений и других неоднородностей | 1982 |
|
SU1071241A1 |
| Устройство для контроля характеристик сельскохозяйственных материалов | 1991 |
|
SU1797451A3 |
| Способ контроля качества уборки корнеклубнеплодов и устройство для его осуществления | 1984 |
|
SU1237100A1 |
| Устройство для контроля относительного перемещения растительного материала | 1991 |
|
SU1804279A3 |
| Способ распознавания растений на фоне почвы | 1975 |
|
SU547183A1 |
| Устройство для распознавания элементов растений | 1982 |
|
SU1118303A1 |
| Способ контроля качества уборкиКОРНЕКлубНЕплОдОВ | 1979 |
|
SU837341A1 |
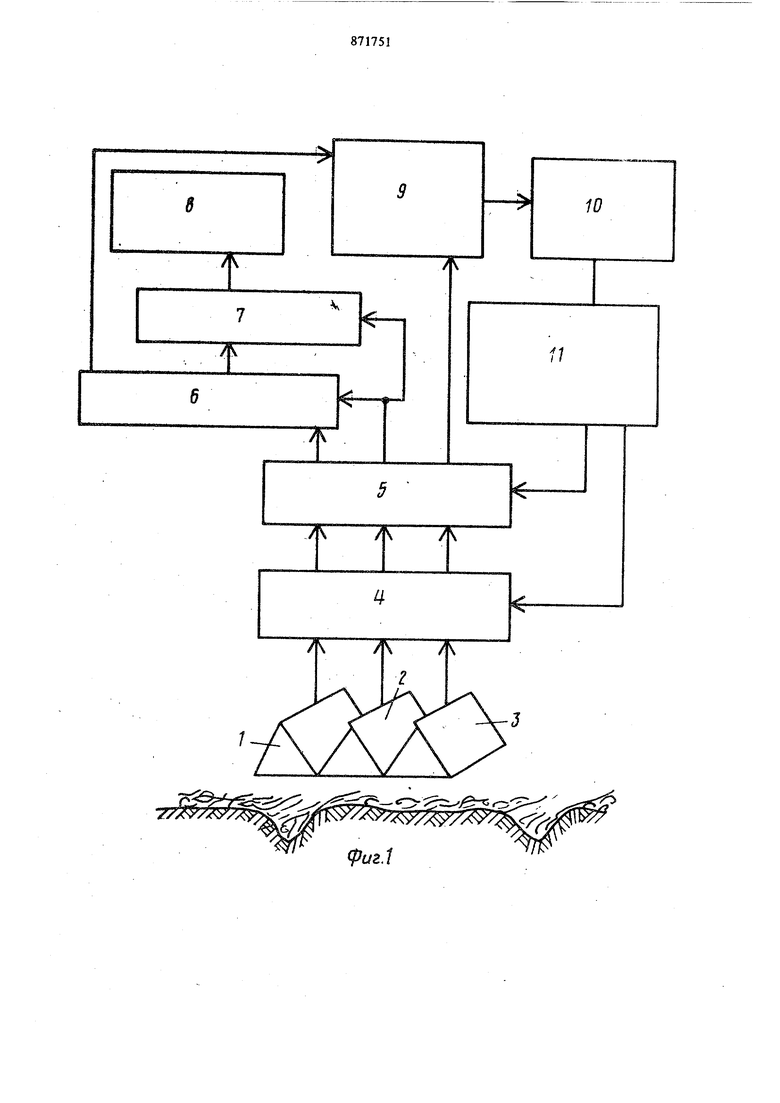
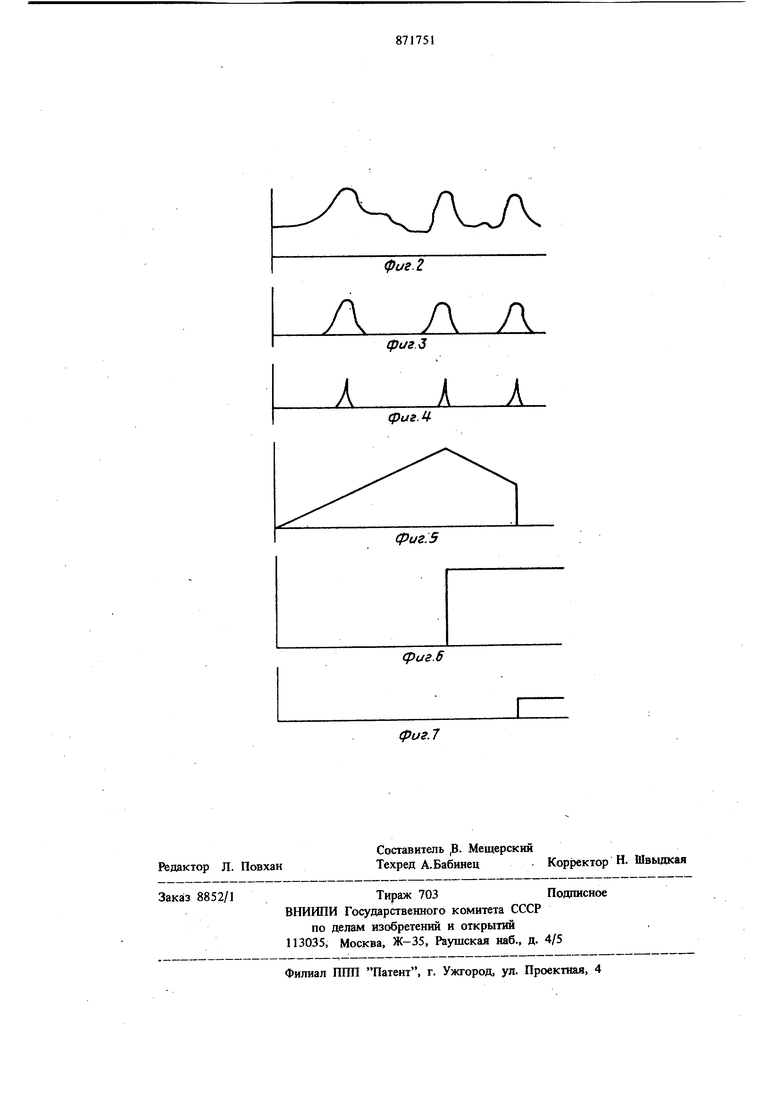
Изобретение относится к сельскому хозяйству и предназначено для контроля скорости и ускорения движения при испытании мобильных сельскохозяйсгвенных маишн относительно распознаваемых элементов растений и неодкородностей почвы. Известен способ контроля скорости движения мобильных машин путем возбуждения над почвой сверхвысокочэстотного электромагнитного поля 1. Недостатки этого способа состоят в труднос ти его применения для получения достоверной информации о скорости движения сельскохозяйственных машин относительно злемеитов почвы из-за непрямолинейности движения маш ны, неровности рельефа и из-за малой величины этой скорости, при которой указанный способ имеет недостаточную точность. Цель изобретения - получение достоверной информации о скорости и ускорении движения машины относительно распознаваемых элементов растений и других неоднородностей почвы. Цель достигается тем, что вдоль рядка элементов растений, последовательно на фиксированном расстоянии друг от друга возоуждают ряд электромагнитных полей, разпознагот полезные сигналы, контролируют отрезки времени между этими полезными сигналами, по которым формируют выходные сигналы, характеризуюшие скорость движения машины, а по соотношению указанных отрезков времени - ее ускорение. На фиг. 1 изображена блок-схема примера для осуществления способа; на фиг. 2 - эпюры сигналов, поступающих от датчиков, распозшющих элементы на фоне почвы; на фиг. 3 - эпюры отфильтрованных сигналов; на фиг. 4 - эпюры сигналов после дифференцирования и формирования; на фиг. 5 эЬюры сигнала интегрирования; на фиг. 6 - эпюра сигнала, обратно пропорционального скорости машины; на фиг. 7 - энюра сигнала, характеризующего ускорение машины. Информацию о скорости и ускорении движения машины относительно элементов, распознаваемых на фоне почвы, получают спедутоциш образом.
Вдоль рядка элементов, распознаваемых на фоне почвы, например корней свеклы, растений, маркерных меток, на заданной высоте относительно поверхности почвы располагают три высокочастотных автогенераторнь1х датчика 1-3. Эти датчики представляют резонаторы, ш основании которьсх установлены вибраторы многоконтурных воспринимающих систем, связанных с задающими контурами автогенераторов, в цепи питания которьис выключены резисторы, образующие выходные цепи автйгенераторных датчиков и включенные во входные цепи блока усиления и фильтрации 4. Автогенераторные датчики 1-3 связью между контурами воспринимающих систем настраивают в режим пониженной чувствительности к свойствам почвы. Этими датчиками 1-3 возбуждают над почвой соответственно три злектромагнитны поля. Зада1шые элементы на фоне почвы распознают по их воздействию на эти поля, сопротивления воспринимающих систем и токи, потребляемые высокочастотными датчиками, за счет чего на выходных резисторах выделяют сигналы, показанные на фиг. 2.
Эти сигналы усиливают в блоке усиления и фильтрации 4, включающем апериодические усилители, собранные на интегральных операционных усилителях, полосы пропускания частот которых устанавливают в диапазонах, обусловленных воздействием на датчики 1-3 распознаваемых элементов. На выходах этих -усилителей устанавливают амплитудные пороговые устройства, посредством чего заданные элементы, например маркерные метки, расположенные поперек направления движения машины, распознают на фоне низкочастотных, высокочастотных и маломощных помех и формируют от распознаваемых элементов полезные сигналы, показа шые на фиг.З; Сигналы блока усиления и фильтрации 4 поступают на входы блока дифференциаторов-формирователей 5. Схемы дифференцирования этого блока 4, содержащего емкости и резисторы, соединяют с формирователями, выполненными на мультивибраторах. В момент изменения знака производной, что . соответствует верпшне сигнала от распознаваемого элемента (фиг.З), осзтцествляют переклю чение мультивибратора, на выходе которого формируют соответствующий сигнал в виде импульса эпюра которого показана на фиг.4. Цепь первого по ходу мащины автогенераторного датчика 1 через соответствующие уси-литель и фильтр блока 4, дифференциатор и формирователь блока 5 соединяют со входом интегратора 6. Цепь второго по ходу движения датчика 2 соединяют с реверсивньпи входом интегратора 6 и входом блока 7 считывгшия сигнала, характеризующего скорость мапшны. Второй , включенный по схеме совпадения И этого блока 7, соединяют с выходом интегратора 6. Интегратор6 выполняют, например, на интегральном операционном усшштеле, а блок 7 считывания на логической схеме И.
Выход блока 7 считывания соединяют с блоком скорости 8, выполненньпи на интегральном операционном усилителе.
Сигналом от первого по ходу движения электромагнитного поля ( датчика 1) включают
интегратор 6, сигнал на выходе которого при этом увеличивается с течением времени, как показано на фиг.З. Сигнал от второго по ходу движения электромагнитного поля (датчика 2) включает блок 7 считывания сигнала скорости,
j после чего сигнал, характеризующий отрезок между сигналами от датчиков 1 и 2, обратно пропорциональный средней скорости мащины на расстоянии между этими датчиками, передают в блок скорости 8 и на выход устройства (фиг.6).
Одновременно сигналом от датчика 2 включают интегрирование интегратора 6 с обратным знаком, отчего сигналы на его выходе уменьщаются с течением времени (фиг.З). Если скорость движения мащины постоянна, отрезок времени между сигналами от датчика 1 и датчика 2 равен отрезку времени между сигналами от датчика 2 и третьего по ходу движения электромагнитного поля, т.е. датчика 3. В этом случае сигнал на выходе интегратора 6 к моменту прихода сигнала от датчика 3 становится равным нулю. При увеличении скорости движения мапшиы отрезок времени между сигналами от датчиков 2 и 3 меньще отрезка времени между сигналами от датчиков 1 и 2. Поэтому на вы5 ходе интегратора 6 к моменту прихода сигнала от датчика 3 существует сигнал, характеризующий ускорение машины фиг.З.
Цепь датчика 3 соединяют со входом блока считывания ускорения 9,второй вход которого соединяют с выходом интегратора 6, а выход со входом интегрального операционного усилителя блока ускорения 10. Блок 9 считывания . сигнала, характеризующего ускорение движения машины, вьшолняют по схеме И. Выход блока 9 соединяют со входом блока включения измерений 11. Выход этого блока 11 соединяют с блокирующими входами блоков 4 и 5, за счет чего осуществляют перевод их и интегратора 6 в исходное состояние, готовое для нового цикла измерения после попадания в электромагнитное поле датчика 1 распознаваемого элемента почвы. При этом на вход блока 10 подают сигнал, характеризующий ускорение мащины (фиг. 7).
5 Сигналы с выхода блока скорости 8 после усиления используют в качестве корректирующих, для чего их подают в цепи автоматического регулирования усиления тех контролирующих 5 устройств, сигналы которых зависят от скорости, т.е. в цепи обработки сигналов радиовол новык устройств, контролирующих урожайность корней свеклы в грядке и потерн корней корнеуборочными машинами. Вьрсодные сигналы этих устройств зависят от объемов корней и от скорости машины. Сигналы с выходов блоков скорости 8 и ускорения 10 используются также в схемах автоматического управления скоростью движения сельскохозяйственных машин. Предложенный способ используют также для решения измерительных задач в устройствах автоматического конт1 оля качественных показателей плантащш пропашных культур, контроля распределения растений в рядках, динамики развития растений, и свойств почвы, контроля урожайности и для контроля неравномерности движения испытуемых мобильных сельскохозяйственных машин. При решении измерительных задач в качестве интегратора 6 (фиг. 1) применяют реверсивный счетчик, управляемый блоком 5. При этом отрезки времени между полезными сигналами от датчиков 1-3 заполняют последовательностью импульсов, поступающих от стабильного генератора импульсов. В этом случае сигналы на выходе блока 7 представляют в виде числа, удобного для дальнейшей обработки информации вычислительной техникой. За счет отрезков времени между сигналами от одного и того же распознаваемого элемента почвы и формирования по ним сигналов, характеризующих скорость и ускорение движения машины, получают достоверную информацию о скорости и ускорении движения машин именно относительно этих -распознаваемых элементов, а не различных установленных точек пространства как это имее место при контроле скорости известными методами. Таким образом, за счет получения дocтoвq)ной информации о скорости и ускорении движения машин относительно распознаваемых элементов растений и других неоднородностей почвы решают задачи контроля неравномерноств движения машин, степени развития растений и их рашределения вдоль рядков, а также задачи автоматического управления с оростью движения почвообрабать1вающей и другой Мобильной техники. Формула изобретения Способ формирования сигналов для распознавания растений и других неоднородностей путем возбуждения над почвой сверхвысокочастотного электромагнитного поля, отличающийся тем, что, с целью получения достоверной информации о скорости и ускорении движения машин относительно распознаваемых элементов растений и других н днородностей почвы, вдоль рядка этих элементов растений последовательно на фиксированном расстоянии друг от друга возбуждают ряд электромагнитных полей, распознают полезные сигналы, контролируют отрезки времени между этими полезными сигналами, по которым формируют выходные сигналы, характериз тощие скорость движения машины, а по соотношеншо указанных отрезков времени - ее ускорение. Источники информации, принятые во внимание при экспертизе 1. Приборы и Системы для измерения вибрации, шума и удара. Справочник. Под редакцией В. В. Клюева, М., Машиностроение, кн. 2, 1978, с. 439.
.
7
fpuz.l
АЛЛ
Л А А
фиг.2
фиг.З
фигЛ
(риг.6
фигЛ
