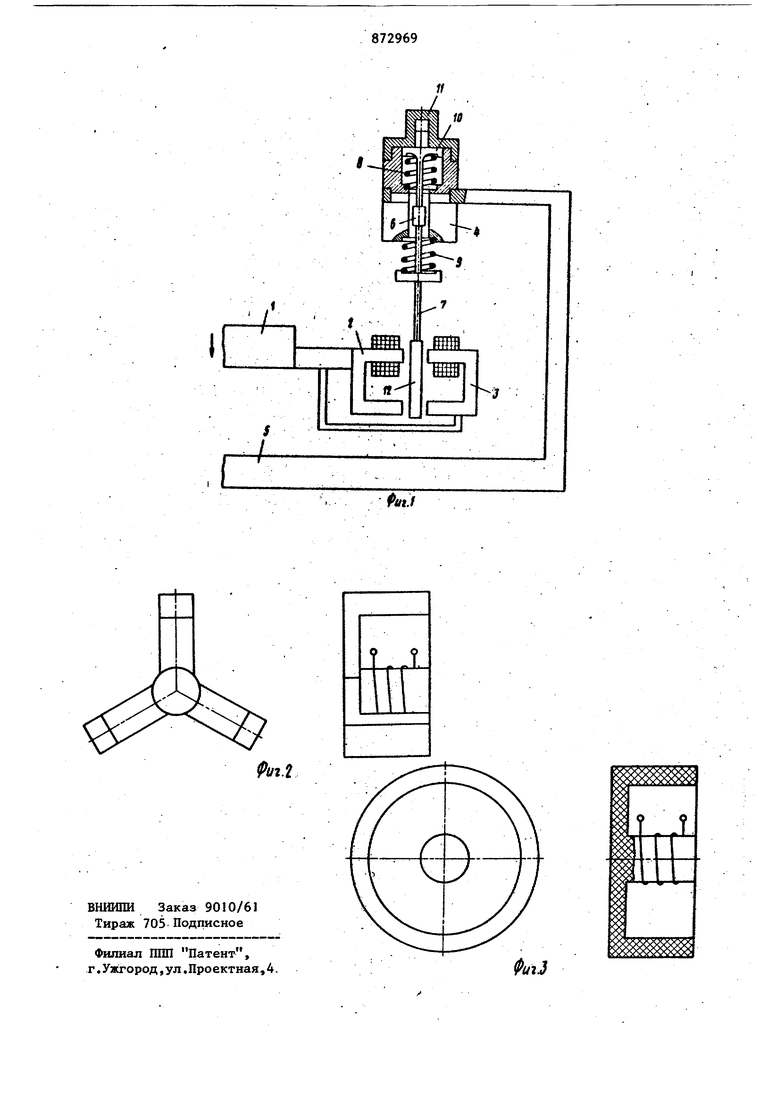
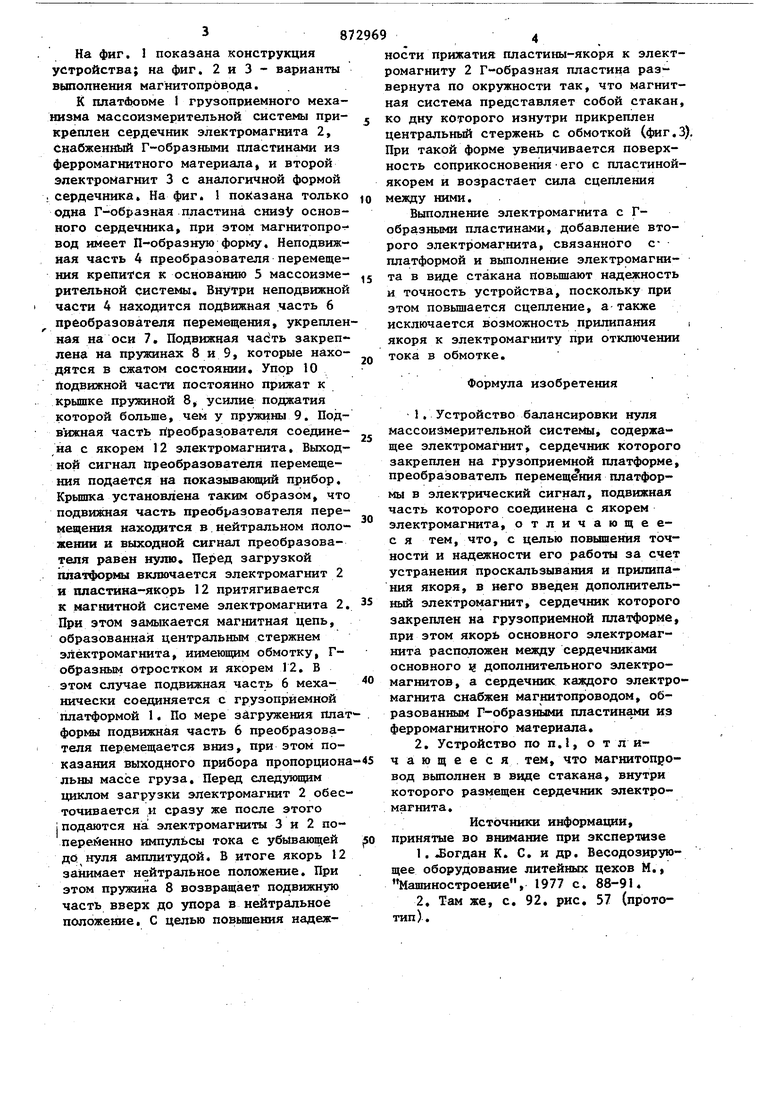
(54)УСТРОЙСТВО БАЛАНСИРОВКИ НУЛЯ МАССОИЗМЕРИТЕЛЬНОЙ Изобретение относится к измеритель ной технике и может быть использовано в устройствах измерения массы,например, в платформенных весах. Известны устройства балансировки нуля, используемые в массоизмерительных системах, содержащие подвижный элемент, соединенный с грузоприемной платформой DJ. Недостатком устройства такого типа является сравнительно низкая точность измерения, обусловленная неопределенностью балансировки нуля. Наиболее близким по технической сущности к изобретению является устройство балансировки нуля массоизмёри--тельной системы, содержащее электромагнит , сердечник которого закре1шен на грузоприемной платформе, преобразователь перемещения платформы в электрический сигнал, подвижная часть которого соединена с якорем электромагнита 2.,- . СИСТЕМЫ Недостатками известного устройства являются невысокая надежность и малая точность ввиду проскальзывания якоря относительно электромагнита, Цель изобретения - повышение точности и надежности его работы за счет устранения проскальэывания и залипания якоря. Для достижения поставленной цели в устройство введен дополнительный электромагнит, сердечник которого закреплен на грузоприемной платфо| ме, при этом якорь основного электромагнита расположен между сердечниками основного и дополнительного электромагнитов, а сердечник каждого электромагнита снабжен магнитопроводом, образованным Г-образными пластинами из ферромагнитного материала. При этом магнитопровод выполнен в виде стакана, внутри которого размещен сердечник электромагнита. 8 На фиг. 1 показана конструкция устройства; на фиг. 2 и 3 - варианты выполнения магнитопрЬврда. К платдюоме грузоприемного механизма массоизмерительной системы прикреплен сердечник электромагнита 2, снабженный Г-образными пластинами из ферромагнитного материала, и второй электромагнит 3 с аналогичной формой ; сердечника. На фиг. 1 показана только одна Г-образная пластина снизу основного сердечника, при этом магнитопрот вод имеет П-образную форму. Неподвижная часть 4 преобразователя перемещения крепится к основанию 5 массоизмерительной системы. Внутри неподвижной части 4 находится подвижная часть 6 преобразователя перемещения, укреплен ная на оси 7, Подвижная чаёть закреплена иа пружинах 8 и 9, которые находятся в сжатом состоянии. Упор 10 йодвижной части постоянно прижат к крышке пружиной 8, усилие поджатия которой больше, чем у пружины 9. Подвижная часть йреобразрвателя соединена с якорем 12 электромагнита. Выходной сигнал преобразователя перемещения подается на показывающий прибор, Крьшпса установлена таким образом, что подвижная часть преобразователя перемещения находщтся в нейтральном положении и выходной сигнал преобразователя равен нулю. Перед загрузкой платформы включается электромагнит 2 и пластина-якорь 12 притягивается к магнитной системе электромагнита 2. При этом замыкается магнитная цепь, образованная центральным стержнем электромагнита, иимеющим обмотку, Гобразным бтростком и якорем 12. В этом случае подвижная часть 6 механически соединяется с грузоприемной платформой 1, По мере зйгружения Плат форьш подвижная часть 6 преобразователя пер емещается вниз, при этом показания выходного прибора пропорциона льны массе груза. Перед следующим циклом загрузки электромагнит 2 обесточивается и сразу же после этого 1 подаются на. электромагниты 3 и 2 поперейенно импульсы тока с убывающей до нуля амплитудой. В итоге якорь 12 занимает нейтральное положение. При этом пружина 8 возвращает подвижную часть вверх до упора в нейтральное положение. С целью повьшеш1Я надежности прижатия пластины-якоря к электромагниту 2 Г-образная пластина развернута по окружности так, что магнитная система представляет собой стакан, ко дну которого изнутри прикреплен центральный стержень с обмоткой (фиг.З), При такой форме увеличивается поверхность соприкосновения его с пластинойякорем и возрастает сила сцепления между ними. Выполнение электромагнита с Гобразными пластинами, добавление второго электромагнита, связанного с- пла.тформой и вьтолненке электромагнита в виде стакана повьшают надежность и точность устройства, поскольку при этом повышается сцепление, а также исключается возможность прилипания i якоря к электромагниту при отключении тока в обмотке. Формула изобретения 1.Устройство балансировки нуля массоизмерительной cиcтe ы, содержа щее электромагнит, сердечник которого закреплен на грузоприемной платформе, преобра;зователь перемещения платформы в электрический сигнал, подвижная часть которого соединена с якорем электромагнита, отличающеес я тем, что, с целью повышения точности и надежности его работы за счет устранения проскальзывания и прилипания якоря, в него введен дополнительш 1Й электромагнит, сердечник которого закреплен на грузоприемной платформе, при этом якорь основного электромагнита расположен между сердечниками основного и дополнительного электромагнитов, а сердечник каждого электромагнита снабжен магнитопроводом, образованшлм Г-образными пластинами из ферромагнитного материала. 2.Устройство по п.}, о т л ичающееся тем, что магнитопровод выполнен в виде стакана, внутри которого размещен сердечник электромагнита. Источники информации, принятые во внимание при экспертизе 1.Богдан К. С. и др. Весодозирующее оборудование литейных цехов М., Машиностроение, 1977 с. 88-91. 2,Там же, с. 92. рис, 57 (прототип).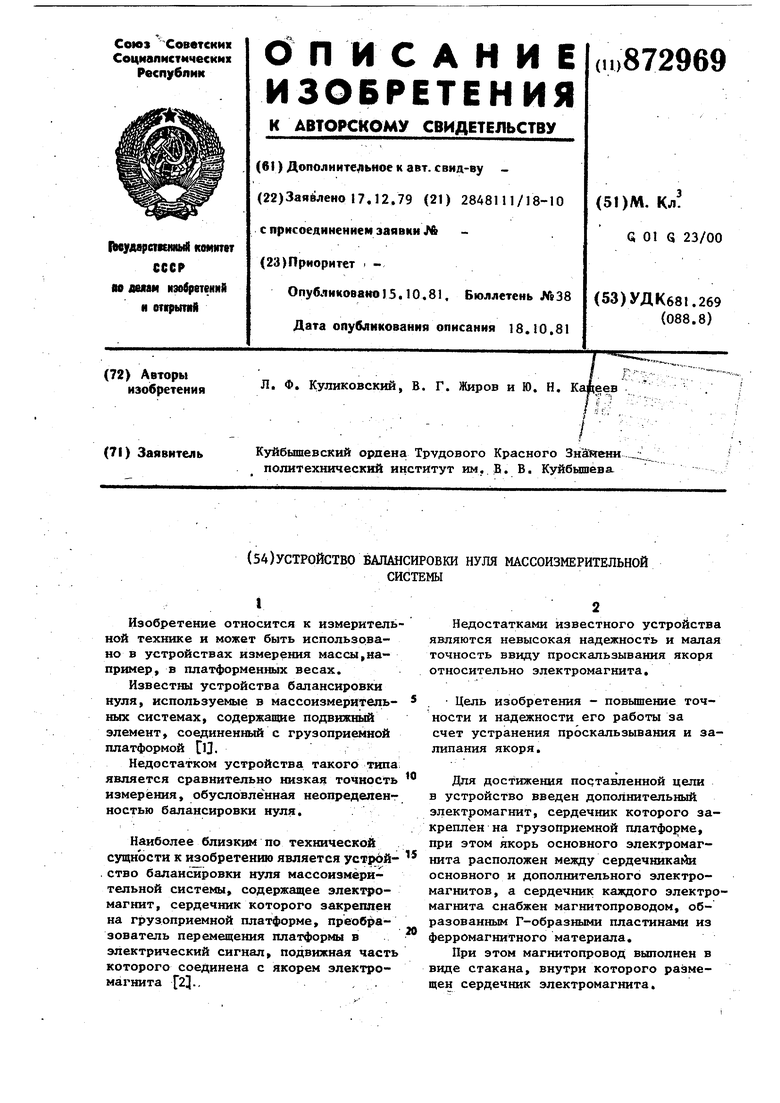
| название | год | авторы | номер документа |
|---|---|---|---|
| Массоизмерительное устройство | 1983 |
|
SU1164554A1 |
| ЭЛЕКТРОННЫЕ ЦИФРОВЫЕ ВЕСЫ | 1999 |
|
RU2162209C1 |
| ЭЛЕКТРОМАГНИТ | 1998 |
|
RU2138091C1 |
| Весоизмерительное устройство | 1988 |
|
SU1619062A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МАССЫ ОБЪЕКТА | 1993 |
|
RU2075732C1 |
| САМОРЕГУЛИРУЕМЫЙ МАГНИТОЭЛЕКТРИЧЕСКИЙ ДЕМПФЕР С РАСКРЫВАЮЩИМСЯ РОТОРОМ | 2020 |
|
RU2731825C1 |
| ГАЗОВЫЙ ИНЖЕКТОР | 2006 |
|
RU2341677C2 |
| Устройство для измерени массового расхода быстроиспаряющихся жидкостей | 1979 |
|
SU861964A1 |
| ЭЛЕКТРОМАГНИТ ПРИВОДА ЭЛЕКТРОУПРАВЛЯЕМОГО КЛАПАНА | 1995 |
|
RU2101597C1 |
| Весовой порционный дозатор жидкого металла | 1974 |
|
SU491837A1 |