1
Изобретение относится к весоизмерительной технике, в частности к устройствам, в которых используется тестовый метод измерения, позволяющий повысить точность определения массы груза.
Известно устройство для измерения массы, содержащее грузоприемную платформу, установленную на массоизмерительный преобразователь, подключенный к блоку измерения, блок коррекции с эталонным грузом и дополнительный массоизмерительный преобразователь .
Однако точность измерения с помощью этого устройства ограничена возможностью исполнения трех упругих элементов с идентичными характеристиками. .
Наиболее близким к предлагаемому по технической сущности и достиг емому результату является массоизмерительное устройство, содержащее грузоприемную платформу, установленную на упругом элемен те, с которым соединены первичный преобразователь и электромагнит для подъема эталонного, груза, подключенные к измерительно-вычислительному блоку С..
Однако точность измерения известного устройства ограничена степенью идентичности характеристик двух первичных преобразователей, входящих в состав-устройства, и идентичностью их соединений с упругим элементом. Недостатком устройства является также -невозможност использования трансформаторных первичных преобразователей, имеющих . большой диапазон выходных мощностей и достаточно надежных.
Цель изобретения - повышение точности за счет уменьшения влияния неидентичности характеристик элементо первичного преобразователя.
Поставленная Цель достигается тем, что в массоизмерительном устройстве, содержащем грузоприемную .платформу, установленную на упругом элементе, с которым соедине;ны первичный преобразователь и электромагнит для поднятия эталонного гру.за, по 1;ключенные к измерительно-вычислительному блоку, первичный преобразователь выполнен в виде Ш-обра кого сердечника с обмотками и двух якорей, установленных на упругс м
45542
элементе на заданном расстоянии друг от друга и под заданным -углом оси симметрии первичного преобразова теля продольной оси упругого элемента, и введен дополнительный эталонный груз с электромагнитом подъема, подключенным к измерительно-вычислительному блоку, закрепленный на упругом элементе на заданном 0 расстоянии от места крепления якорей между ними.
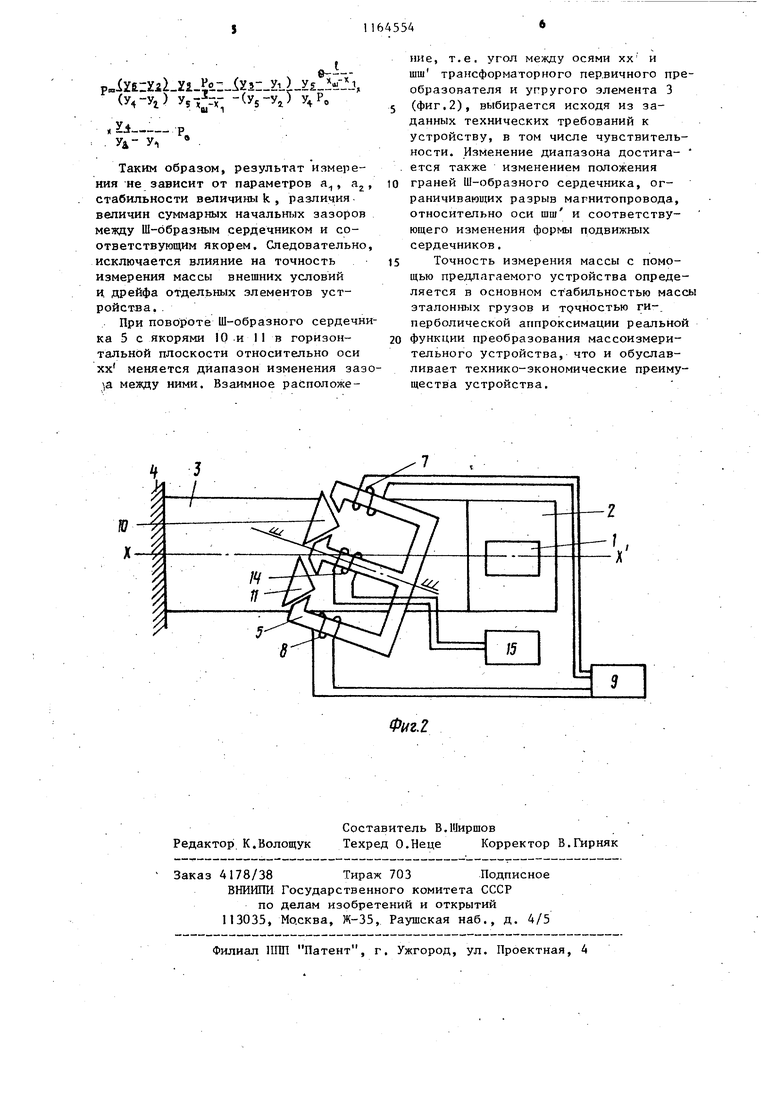
На фиг.1 приведена схема устройства, вид сбоку; на фиг.2 - то же, вид сверху.
5 Измеряемая масса 1 помещена на грузоприемную платформу 2, соеди, ненную с упругим элементом 3, который укреплен на станине 4. Ш-образный сердечник 5 укреплен на упругом элементе 3 посредством соединительного элемента 6. Измерительные обмотки W 7 и W-8 подключены к блоку измерения 9, который выполнен в виде управляющей ЭВМ с соответствующим интерфейсом. Подвижные якоря
10 и 11 укреплены на упругом элементе 3 посредством соединительных элементов 12 и 13. Обмотка возбуждения 14 подключена к источнику возбуждеQ ния 15. Основной блок коррекции
представляет собой электромагнит 16, механически соединенный с грузоприемной платформой 2, и эталонный груз 17 массой Р. Электромагнит 16 подключен к блоку 9. Дополнительный блок коррекции состоит из электромагнита 18, укрепленного на упругом элементе 3 между соединительными элементами 12 и 13, и эталонного груза 19 массой 0 . Электромагнит 18 подключен к блоку 9, Ш-образный сердечник 5 с обмотками 7 и 8 и с якорями 10 и 11 является трансформаторным первичным преобразователем.
Принцип действия устройства заключается в проведении ряда измерений, результаты которых используют для вычисления измеренной массы.
Устройств9 работает следующим образом.
Упругий элемент 3, работающий на изгиб, под действием сипы веса Р измеряемой массы 1 деформируется, что приводит к перемещению подвижных якорей 10 и 11: относительно сердечника 5. После этого блок 9 снимает с измерительных обмоток 7 и 8 сигналы у и у. Во втором такте после включения блоком 9 электромагнита 16, подсоединяющего к грузоприемной платформе 2 эталон ный груз 17 с массой Р, блок 9 снимает с обмоток 7 и 8 сигналы у и У4. В третьем такте элетрома - нит 16 выключается блоком 9, и груз 17 массой Р отсоединяется от грузоприемной платформы 2, элек тромагнит 18 включается блоком 9 и подсоединяет груз 19 массой 0, после чего блок 9 снимает с обмотки 8 сигнал у , Напряжение на выходе измерительной катушки 7 и 8 определяется выражением: 1б«В и|«оВи1 и нa - SP где Е - напряжение на выходе изме рительной катушки; со - частота напряжения возбуж дения; Ig - ток в катушке возбуждения Wg - количество витков в катуш ке возбуждения; W - количество витков в измер тельной катушке; |U.p - магнитная постоянная пуст ты; S - площадь сечения сердечник трансформатора; 5„о1ч суммарный начальный зазор между Ш-образным и соотве ствующим подвижным сердеч . НИКОМ при 5р- зазор, обусловленный изме емым параметром Р.. При изгибе величина зазора, обу ,ловлениого параметром Р, между яко рем и сердечником, соединенными с поверхностью упругого элемента, равна 5(Р) Зн«чЕ но(ч 5н«ц P-h -.4 i где € - относительная деформация поверхностного слоя упруг го элемента; M,jp- изгибающий момент; h - расстояние от нейтральног слоя до середины зазора, деформация которого рассматривается;Е - модуль упругости; I - момент инерции сечения уп гого элемента OTHocHTeJibно нейтральной оси; 44 х - расстояние вдоль оси хх от точки крепления соответствующего якоря до прямой, перпендикулярной оси хх и проходящей через точку приложения параметра Р. / Хщ - расстояние вдоль оси хх от крепления сердечника до прямой, перпендикулярной оси хх и проходящей через точку приложения параметра Р.. Следовательно f ««Hfj (х -х1 г- I Е I I 0-1.. WoO)./S.V2 L с, i J Полагая, (Хц,- Х2) (Хщ- х) х К, де К определяется на основе техничеких требований к массоизмерительому устройству и реализуется выбором оответствующих х, х. и х,, и учиывая, что при включении электромагита 18, подсоединяющего груз 19 масой 9 (электромагнит 16 включен и руз 17 массой Р отсоединен от гру- оприемной платформы), относительная еформация определяется выражением f- (ХШ- xj) +9l3 . Ё I е 1 - расстояние вдоль оси хх от точки приложения эталонного груза О до точки крепления якоря 11. Запишем систему уравнений, связы-г ющих параметры массоизмерительноустройства и измеряемую массу Р, виде 1 а,(Т-1-ЬР). 1 2 a(T+bkP) 1 . I, i+b(p+pj3 1 4 STTT+bkTp+pj УВ (kp+j)Т е j . Хш - X, Система решается в блоке 9 по выжению
e-ipJz ij:il Xi- o; xii yi.),
(У4-У) -(Vs-y,)
Д1..
р. . УА- УЧ
Таким образом, результат измерения не зависит от параметров а , а. , стабильности величины k, различия величин суммарных начальных зазоров между Ш-образным сердечником и соответствующим якорем. Следовательно, исключается влияние на точность измерения массы внешних условий и. дрейфа отдельных элементов устройства. .
. При повор оте Ш-образного сердечника 5 с якорями 10 .и 11 в горизонтальной плоскости относительно оси хх меняется диапазон изменения зазора между ними. Взаимное расположение, т.е. угол между осями хх и шш трансформаторного первичного преобразователя и упругого элемента 3
(фиг.2), выбирается исходя из заданных технических требований к устройству, в том числе чувствительности. Изменение диапазона достига- ется также изменением положения
граней Ш-образного сердечника, ограничивающих разрыв магнитопровода, относительно оси шш и соответствующего изменения формы подвижных сердечников.
Точность измерения массы с помощью предлагаемого устройства определяется в основном стабильностью массы эталонных грузов и точностью гиперболической аппроксимации реальной
функции преобразования массоизмерительного устройства, что и обуславливает технико-экономические преимущества устройства.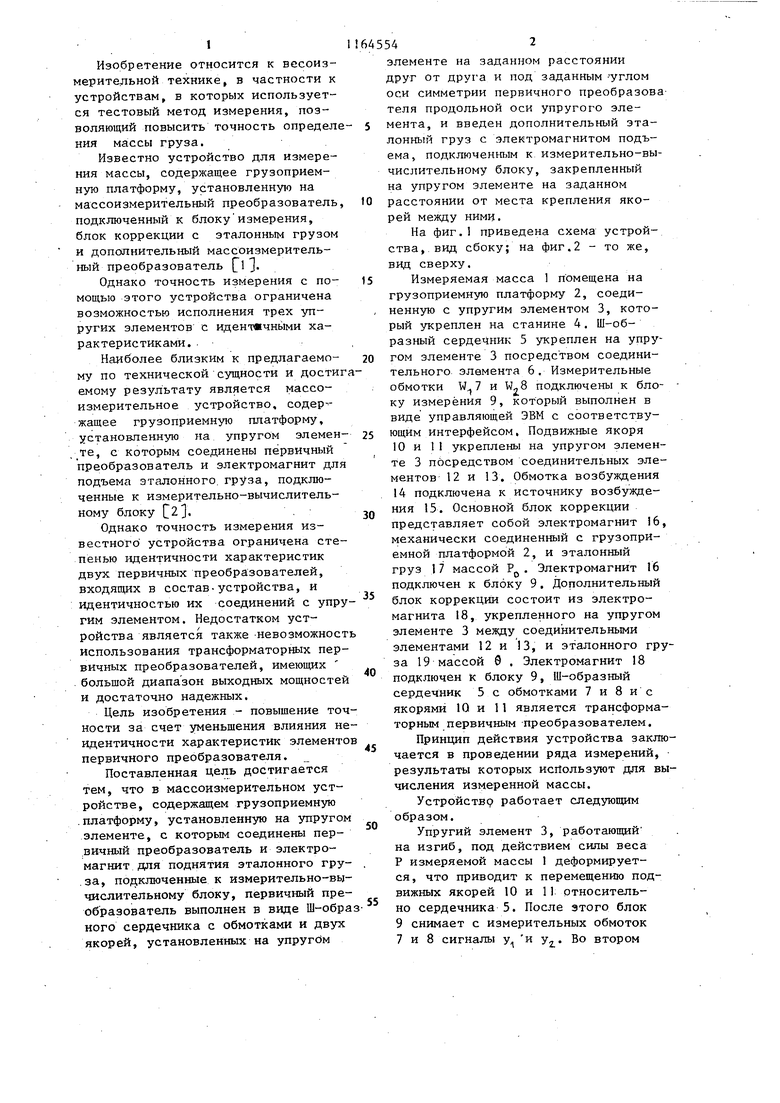
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство балансировки нуля массоизмерительной системы | 1979 |
|
SU872969A1 |
| Устройство для измерения массы | 1978 |
|
SU685922A1 |
| Устройство для измерения массы | 1982 |
|
SU1076764A2 |
| Устройство для измерени массового расхода быстроиспаряющихся жидкостей | 1979 |
|
SU861964A1 |
| Способ измерения электрических и неэлектрических параметров | 1978 |
|
SU785769A1 |
| Устройство для измерения массы | 1975 |
|
SU523300A1 |
| Весоизмерительное устройство | 1990 |
|
SU1755057A1 |
| Устройство для измерения массы | 1975 |
|
SU523299A1 |
| Способ измерения электрических и неэлектрических величин | 1985 |
|
SU1269038A1 |
| ТЕНЗОМЕТРИЧЕСКОЕ МАССОИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО ДЛЯ ВЗВЕШИВАНИЯ ГРУЗОВ (ВАРИАНТЫ) | 2009 |
|
RU2411463C2 |
МАССОИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО, содержащее грузоприемную платформу, установленную на упругом элементе, с которым соединены первич- . нь1й преобразователь и электромагнит, для поднятия эталонного груза, подключенные к измерительно-вычислительному, блоку, отличаюцеес я тем, что, с целью повышения точности за счет уменьшения влияния . неидентичности характеристик элементов- первичного преобразователя, в нем первичный преобразователь выполнен в виде Ш-образного сердечника с обмотками и двух якорей, уставов- . ленных на упругом элементе на заданном, расстоянии друг от друга и под заданным углом симметрии первичного преобразователя к продольной оси упругого элемента, и введен дополнительный эталонный груз с электромагнитом подъема, подключенным к измерительно-вычислительному блоку, закреп ленный на упругом элементе на заданном расстоянии от места крепления якорей между ними.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для измерения массы | 1975 |
|
SU523299A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для измерения массы | 1978 |
|
SU685922A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
