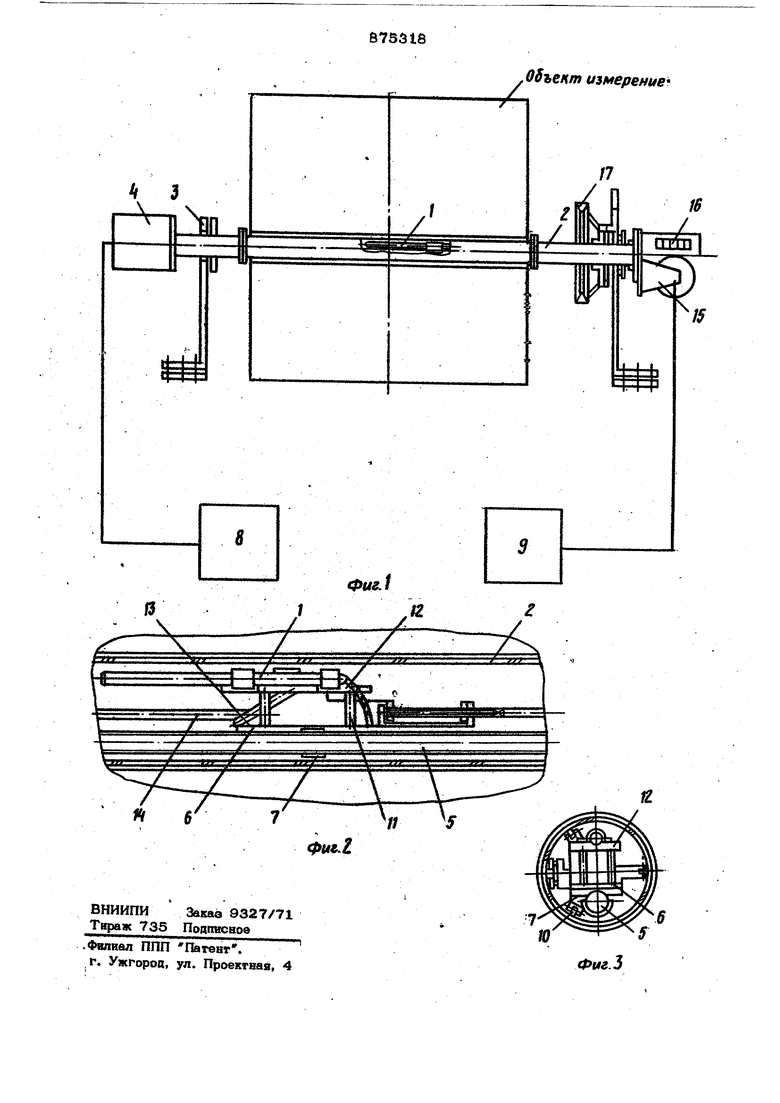
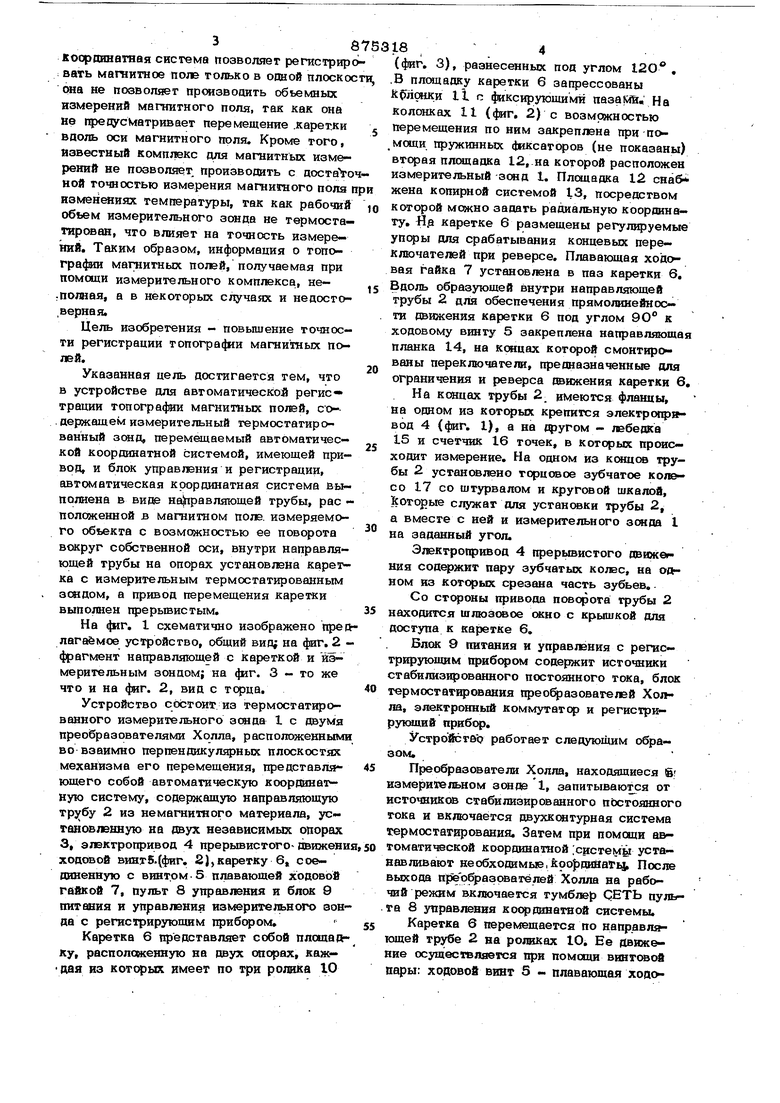
Изофетение огносигся к устройствам для измерения магнитных величин,. и имен но к устройствам для регистрации rcwor гра4ии магнитных полей сверхпрсжоцяшвх магнигаых систем.. Известно устройство для автоматической регистрации топографии магнитных полей, содержащее зшд с датчиком Холла, генератор .импульсов запуска, ,магнитную систему, регис 1рирукядий прибор н, механизм возврашо-поступательного перемешенкя зонда-. D-H . Однако это устройство имеет узкоспеднальное назначение, привод перемшц@вия зовда не рассчитан на равномерное дв№ж@аве. Кроме того, это устройство мсвкет быть использовано Тбпько для малогаба рвтньос систем. Большой объем измеряемого магввтного поля приводит к необходимости создани комплекса приборов для магнитных вэмерений. Наиболее близким по технической cyasf ности к предлагаемому является комваекс приборов для магнитных измерений, соёт1 5Ш1ИЙ из магнитометра, зонда с датчиком Холла автоматической кооршватной системы с устройством управления и цифропе- чатающего устройства. Основой координатной системы сгужкт поворотная балка, укрепленная на опорной плвге при помощи кругового подшионика. Опорная плита помещается в центре электромагнита. Радиальная координата устанавшвается перемещ {ием измери тельной каретки вдоль направляющих по воротной балки. Точная установка радиальной координаты обеспечивается Гсцстё мой пяезд, располсисенных на направл юшей балке, в которые западает фяксатор, установданный на карейсе.; Азимутальная координата устанавливается поворотом балки при помоши с юдяшей системы. Пе ремещение каретки по радиусу осуществляется при помощи электродвигателей, изго товленных из немагнитных материалов Г2Л. Недостатком известного комплекса оля магнитных измерений является то, что 36 коороинатная система позволяет регистрир вать магнитное поле только в опной плоскос она не позволяет производить объемных измерений магнитного поля, так как она не предусматривает перемещение .каретки вооль оси магнитного поля. Кроме того, известный комплекс для магнитных измерений не позволяет производить с доста о ной точностью измерения магнигного поля изменениях температ)фы, так как рабочий обьем измерительного зонда не термостатирован, что влияет на точность измерений. Таким образом, информация о топографии магнитных по;кй, получаемая при помсхци измерительного комплекса, не;ПОЛная, а в некоторых случаях и недосто, верна я. Цель изобретения - повьпиение точности регистрации топографии магнитньи полей. Указанная цель достигается тем, что в устройстве для автоматической регис трации топографии магнитных полей, со. держащем измерительный термостатированный з(жд, перемещаемый автоматической координатной системой, имеющей привод, и блок управпэния и регистрации, автоматическая координатная система выполнена в виде направляющей трубы, рас положенной J3 магнитном пода, измеряемого объекта с возможностью ее поворота вокруг собственной оси, внутри направляющей трубы на опорах установ;кна каретка с измерительным термостатированным зондом, а привод перемещения каретки выполнен прерьюистым. На 4иг. 1 схематично изображено пре лагаемое устройство, общий вид; на фиг. 2 фрагмент направляющей с кареткой и измерительным зондом; на 4иг. 3 - то же что и на фиг. 2, вид с торца. Устройство состоит из термостат1фованного измерительного зсида 1 с двумя преобразователями Холла, расположенным во взаимно перпендикулярных плоскостях механизма его перемещения, представлю ющего собой автоматическую координатную систему, содержащую направляющую трубу 2 из немагнитного материала, установленную на даух независимых опорах 3, элэктропривод 4 прерывистого-движен ходовой винтВ.(фиг. 2),каретку 6 соединенную с винт.ом-5 плавающей ходовой гайкой 7, пульт 8 управления и блок 9 питания и управления измерительного зон да с регистрирующим прибфом. Каретка 6 представляет собой площад ку, располсекенную на двух «lopax, каждая из которых имеет по три ролика 10 18 ,-4 (фиг. 3), разнесенных под углом 120, В плсяцадку каретки 6 запрессованы олонки 11 с фиксирующими пазаш.1 На колонках II (фиг. 2) с возможностью перемещения по ним закреплена при помощи пружинных фиксаторов (не показаны) вторая плсяцадка 12,.на которой расположен измерительный зшд I. Площадка 12 снаб жена копирной системой 13, посредством которой мсжно задать радиальную координату, flp каретке 6 размещены регулируемые для срабатывания концевых переключателей при реверсе. Плавающая ходовая гайка 7 установлена в паз каретки 6. Вдоль образующей внутри направляющей трубы 2 для обеспечения прямолинейности движения каретки 6 под углом 90 к ходовому винту 5 закреплена направляющая планка 14, на концах которой смонтированы переключатели, предназначенные для ограничения и реверса движения каретки 6. На концах трубы 2 имеются фланцы, на одном из которых крепится электропривод 4 (фиг. I), а на другом - лгбедка 15 и счетчик 16 точек, в которых происходит измерение. На одном из концов трубы 2 установлено торцовое зубчатое колесо 17 со штурвалом и круговой шкалой, Ьоторые служат для установки трубы 2, а вместе с ней и измерительного зонда 1 на заданный угол. Электропривод 4 прерывистого движег ния содержит пару зубчатых колес, на одном из которых срезана часть зубьев. Со стороны привода поворота грубы 2 находится шлюз(ое окно с крышкой для доступа к каретке 6. Блок 9 питания и управления с регистрирующим прибором содержит источники стабилизированного постоянного тока, блок термостатирования преофазователэй Холла, электронный коммутатф и регистрирукоций прибор. Устройствр работает следующим образом. Преобразователи Холла, находящиеся & измерительном зонде 1, запитываюгся от источников стабилизированного постоянного тока и включается двухкситурная система термостатирования. Затем при помощи автоматической координатной системы устанавливают не обходимые, коо дивать После выхода пр1вобразрватёлей Холла на рабочий режим включается тумблер СЕТЬ пульта 8 управления координатной системы. Каретка 6 перемещается по направляющей трубе 2 на роликах 10. Ее движение осуществляется при помощи винтовой пары: ходовой винт 5 - плавающая ходо58вая гайка 7, Так как электропривоа 4 1гме ет окну пару зубчатых колес, на ошом из которых срезана часть зубьев, то за поло вину оборота овигателя электропривода 4 ходовой винт 5 делает один оборот, а за время второй половины оборота двигателя происходит измерение, так как ходовой винт 5 неподвижен. Таким образом, ка ретка 6 движется вдаль грубы 2 прерывис б с заданным шагом. Направляющая планка 14 обеспечивает при этом прямолтшейвоё перемещение каретки 6, После прохождани всех за данных точек по длине магнитной системы производится автоматический реверс двигателя и перемещение площадки 12 с из мерите льнь1М зондом I по напра.в .ляющим колонкам 11 при помсщи копир- ной системы 13 на следующую радиальную координату. При этом площадка 12 фиксируется пружинными фиксаторами. Начинается обратное каретки 6, но измерение параметров магнитного поля производится в фугих его точках. Для установки углсжой координаты, т.е. для перемещения измерительного зшда 1 вдоль оси магнитного поля, направляющая труба 2с находящейся в ней кареткой 6 поворачивается вокруг своей оси в опорах 3 при помсщи зубчатого колеса 17 со штурвалом и круговой шкалой. Лебедка 15 обеспечивает постоянное натяжение кабеля зшда 1 при движении каретки 6.. Выходной сигнал с преобразователей Холла подается на электронный коммутатор,-регистрируется цифровым прибфом, который связан через транскриптор с ци4н рбПечатающей машиной и ЭВМ (не показано). Предлагаемое устрбйство позволяет с высокой степенью точности производить объемное измерение топографии магнитных полей, так как кроме радиальной и ази- / мутальной координат коорданатная сж;тема обеспечивает перемещение каретки с измерительным зсждом вдоль оси магаит- ного поля. Таким образом, появилась возможность ii3M paTii.jviarHanloe (иле- в любой его точке, в любой заданной плоскости с высокой степенью точности и с воспроизводимостью, результатов измерений. Автоматическая координатная система предз5Ьматрйвает автоматическое и.ручИое управление перемещением каретки. В ручном режиме каретку можно остановить в любой точке, продолжить движение карелки, реверсирсвать ее перемещение. Предлагаемое устройство снабжено специальным термостатированным изме .. 186 рительным зон-Д м с двумя контурами регулирования температуры и двумя взаимно перпендикулярными преобразователями Холла, что позволяет производить измерения магнитного поля по двум его составляющим, т.е. точечным измерением. Использование термостатированного зонда особенно существенно при измерениях магнитного поля сверхпроводящих магнитных систем, типа соленоида. Так как соленоид имеет вытянутую в геометрию поля« причем ,ttittatu эта составляет бо;ее 10ОО мм при вву рением диаметре более 1ОО мм, то наи- большую трудность при разработке измерительной системы представляет выбор конструкции направл5пощей для каретки с с измерительным зондом. Известные направляющие, изготовлю - , ные в виде ленты, швеллера, тросика, длинного щупа с преобразователем Холла на кшце, не обеспечивает прямолине1Ь- ности. В результате прогиба таких напра&ляюших достоверность координаты, где происходит измерение, Becb1s aСомнительна. В предлагаемом устройстве в,качестве , направляющей координатной системы выбран а: гонкое теней я труба из немагнитного материа ш. Она имеет минимальный прогиб и обеспечивает стабильную прямолинейность движения каретки. Кроме .того, труба оказывает наименьшее влияние на ошибку измерения, вследствие своей симметрии относительно магнитного поля соленоида. Формула изобретения Устройство для автоматической регистрации топографии магнитных полей, содержащее измерительный термостатированный зонд, перемещаемый автоматической координагной системой, имеющей ; привод, и. блок утфавления и регистрации, отличаюше еся тем, что, с целью повышения точности регистрации, автомагическая кофдинатная система вьлолнена в виде направляющей трубы, расположенной в магнитном поле измеряемого объекта с возможностью ее поворота вокруг собственной оси, внутри направляющей трубы на опорах установлена каретка с измерительным термостатированным зсндом, а привод перемещения Каретки выпошен пре рывистым. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 521536, кл. S 01Й 33/02, 197S. 2. Приборы и техника эксперимента , 1968, № 6, с. 217.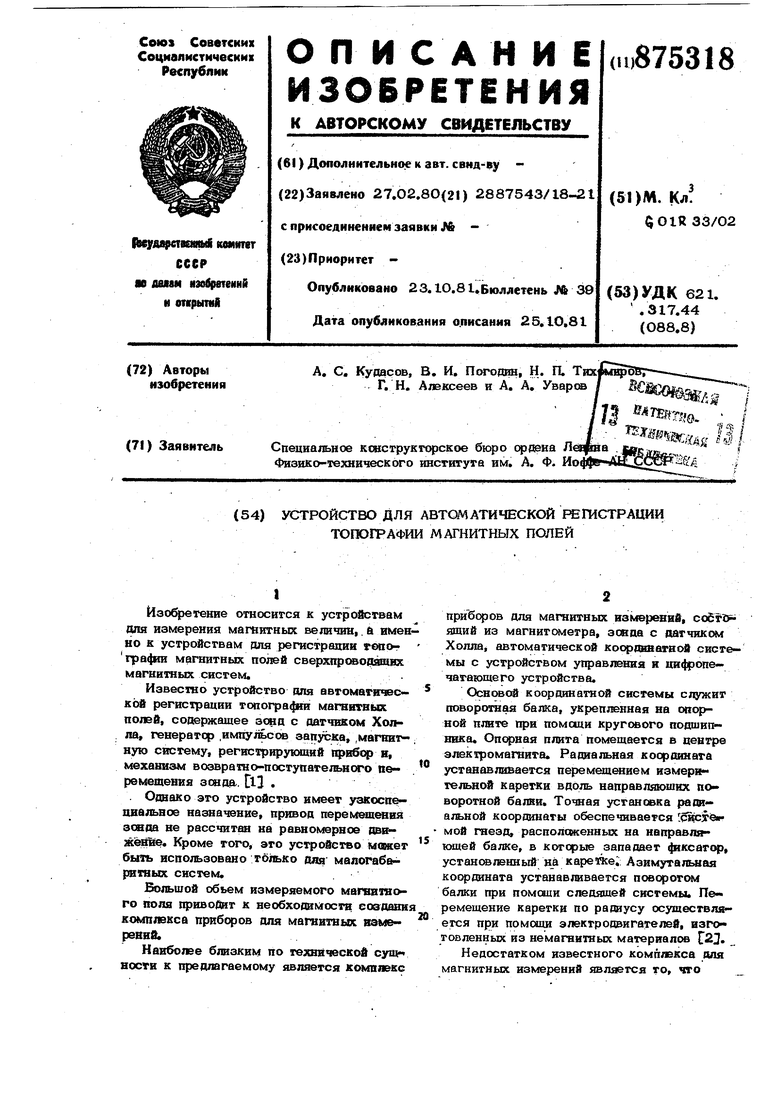
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для АВТОМАТИЧЕСКОЙ ЗАПИСИ МАЛЫХ | 1972 |
|
SU323749A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОЙ ЗАПИСИ ТОПОГРАФИИ ПОЛЕЙ МАГНИТНЫХ СИСТЕМ | 1969 |
|
SU256851A1 |
| Автоматический компаратор | 1976 |
|
SU657375A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ И РЕГИСТРАЦИИ ИЗМЕНЕНИЙ МАГНИТНОЙ ИНДУКЦИИ В ШИРОКОМ ИНТЕРВАЛЕ | 1973 |
|
SU363945A1 |
| МНОГОКООРДИНАТНАЯ МЕТРОЛОГИЧЕСКАЯ ПЛАТФОРМА | 2007 |
|
RU2365953C1 |
| МАГНИТОМЕТРИЧЕСКИЙ МОДУЛЬ ИЗМЕРИТЕЛЬНО-АНАЛИТИЧЕСКОГО КОМПЛЕКСА ДЛЯ ТЕСТИРОВАНИЯ ОТКРЫТЫХ МАГНИТНЫХ СИСТЕМ | 2006 |
|
RU2328754C2 |
| Зонд для контроля магнитных периодических систем | 1979 |
|
SU781725A1 |
| Устройство для исследования топографии магнитных полей | 1977 |
|
SU746351A1 |
| Устройство для трассировки магнитного поля | 1971 |
|
SU650031A1 |
| ПОВЕРОЧНЫЙ КОМПЛЕКС КООРДИНАТНЫХ ПРИБОРОВ И ИЗМЕРИТЕЛЬНЫХ СИСТЕМ | 2012 |
|
RU2494346C1 |