(54) СИСТЕМА ДИСКРЕТНОГО УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМ ПРОЦЕССОМ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для диагностики состояния измельчительного агрегата | 1984 |
|
SU1192855A1 |
| Тренажер оператора котельной установки | 1986 |
|
SU1319065A2 |
| Устройство для контроля электрических параметров полупроводниковых диодов | 1983 |
|
SU1138768A1 |
| Устройство для контроля и управления технологическими процессами испытаний и тренировки фотоэлектронных умножителей | 1988 |
|
SU1517041A1 |
| Устройство для преобразования контролируемых параметров | 1986 |
|
SU1320816A1 |
| Система обнаружения и классификации морских целей на базе нейросетевых технологий и элементов искусственного интеллекта | 2021 |
|
RU2780607C1 |
| Магнитный структуроскоп | 1983 |
|
SU1128154A1 |
| Устройство дл прогнозирования неисправностей радиоэлектронной аппаратуры | 1978 |
|
SU742958A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО КОНТРОЛЯ ПАРАМЕТРОВ НАПРЯЖЕНИЯ | 1990 |
|
RU2018147C1 |
| СПОСОБ И УСТРОЙСТВО АВТОМАТИЗИРОВАННОГО КОНТРОЛЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ЭЛЕКТРООБОРУДОВАНИЯ | 2014 |
|
RU2548602C1 |
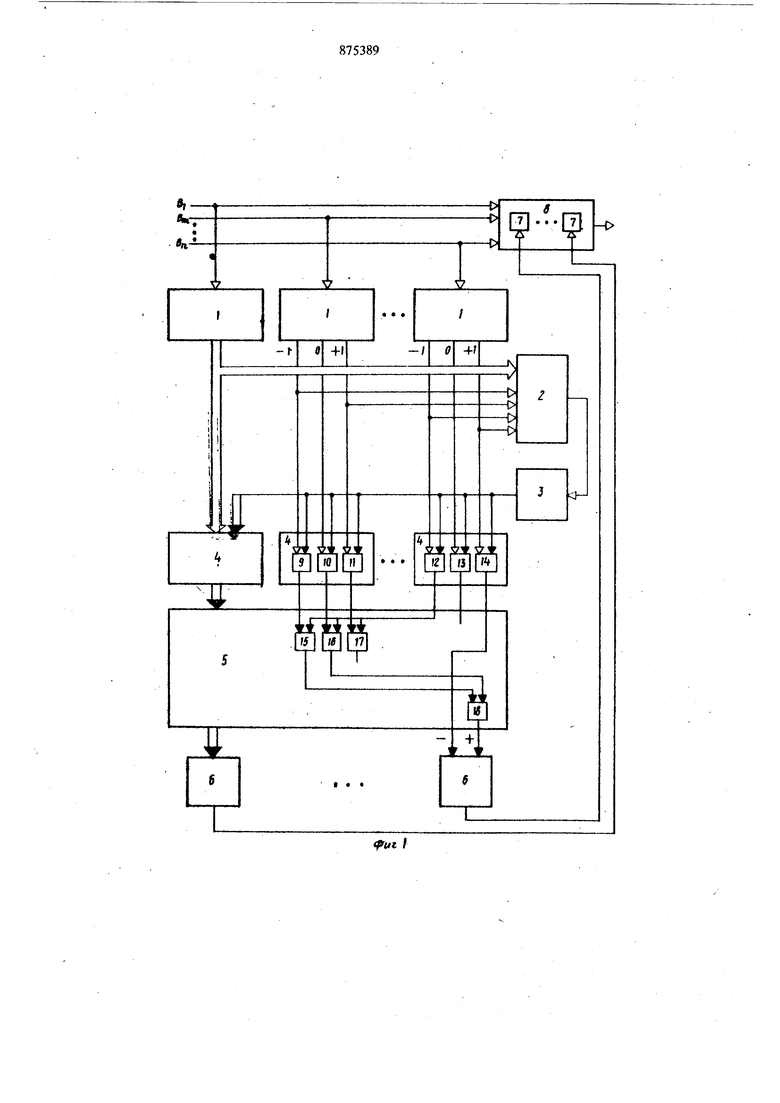
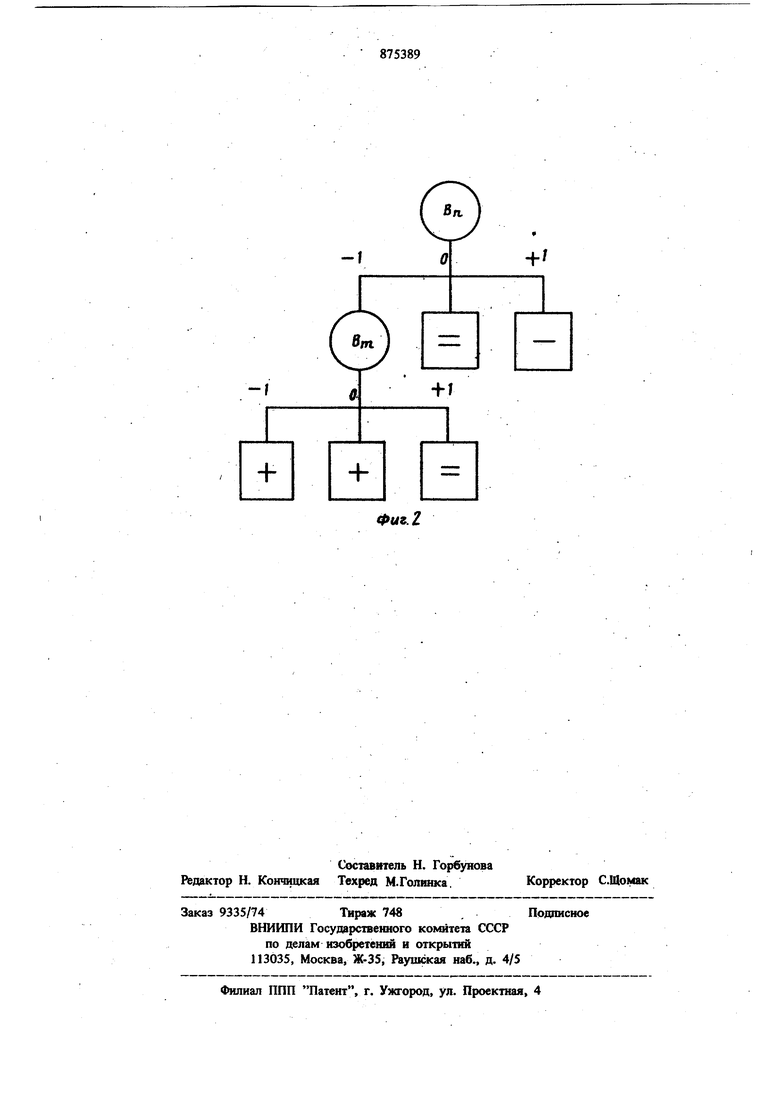
Изобретение относится к управлению сложными технологическими процессами и может быть применено там, где необходимо осуществлять управление процессом при неполной априорной информации об объекте управления. Известна комбинированная система экстремального управления технологическим процессом Система содержит последовательно соединенные объект управления, формирователь признаков, блок распознавания, логический блок и регулятор по возмущению, другой вход которого соединен с первым входом объекта управления, а выходы регулятора по возмущению подключены к соответствующим входам объекта управления и формирования признаков. Система осуществляет преобразование информации с объекта в систему признаков (код состояния), распознавание состояния в текущий момент времени, отнесение (классификацию) этого состояния к одной из ситуаций и выработку корректирующего воздействия на объект для устранения ситуации. Логический блок предназначен Для согласования выхода блока распознавания и вхо да регулятора по возмущению, а также для роедупреждения возникновения автоколебаний в системе. В признаки преобразуются возмущающие воздействия и выходной показатель процесса (показатель качества). Признаком, по которому определяется окончание помехи, является появление кода качества, равного нулю, после выполнения коррекции 1. Недостатками системы являются невысокие качества управления и быстродействие, так как примененная в ней схема формирователя не позволяет распознать более четырех ситуаций. Наиболее близким техническим рещением к предлагаемому является снстема экстремального управления технологическим процессом. Она характеризуется теми же существенными признаками, но формирователь признаков содержит п-идентичных каналов и работает циклически, т.е. формирует три признака, выдает их в блок распознавания и устанавливается в исходное состояние. Формирователь признаков и блок распознавания содержат электронные ключи, триггеры, формирователи импульсов и схемы , ИЛИ 2. 3 Поскольку в признаки преобразуются выходные показатели процесса, то ситуация отражает уже факт выпуска продукции со свойствами, отличными от заданных, и эта продукция выпускается до устранения ситуаций. В признаки (код состояния) преобразуются во мущающие воздействия, а в большинстве случаев учесть и распознать все возмущающие воз действия невозможно. Кроме того, каждый код состояния относится к одной ситуации, ко торой соответствует определенная величина кор ректирующего воздействия, т.е. заранее должно быть задано конкретное корректирующее .воздействие для ситуаций. Система не обладает свойствами экстраполяции. Алгоритм классификации состояний дискретных объектов управления и выработки вектора управления пре назначен для представления зависимости состояние-управление в виде деревьев классификации состояний объекта управления по управляющим воздействиям. Цель изобретения - повышение быстродействия системы. Поставленная цель достигается тем, что в систему дискретного управления технологическим процессом, содержащую блоки согласования, подключенные выходами ко входам исполнительных элементов, преобразователи анало код, соединенные входами с входами системы, а выходами - с первыми входами ключей, введены генератор импульсов, логический блок прогнозирования и блок импульсов включения, подключенный входами к выходам преобразователей аналог-код, а выходом через генератор импульсов - ко вторым входам ключей, выходы которых соединены с входами логического блока прогнозирования, подключенного выходами ко входам блоков согласования. На фиг. 1 представлена блок-схема предлага емой системы; на фиг. 2 - дерево классификащш ситуаций. Устройство содержит преобразователи 1 анал код, блок 2 импульсов включения генератора 3 импульсов, ключи 4, логический блок 5 про гнозирования, блоки 6 согласования, исполнительные органы 7 и 8 объекта управления. На фиг, 2 В„ - условные обозначения контролируемых переменных технологического процесса. Вершинами (точками разветвления) дерева являются признаки ситуации (контролиЮ емые Леременные процесса). От каждой вершины всегда отходят 3 ветви, соответствующие значениям переменных: меньще нормы (-1), в норме (0), выше нормы (+1). В листьях (концевых точках) деревьев указьшаются значения управляющего воздействия (уменьшить -, не изменять , увеличить + Устройство работает следующим образом. Работа системы осуществляется, когда теку- щая величина каждой контролируемой переменной объекта управления преобразуется в трехуровневый код: выше нормы (tl), ниже нормы (-1) и норма (0). Изменения управляющих воздействий также имеют троичное кодирование: увеличить (+), уменышть (-) и не изменять (). Преобразователи 1 контролируемых переменных в код имеют три выходных шины. Сигнал на щине (-1) возникает при значении соответствующей контролируемой переменной ниже нормы, на шине (+1) - выше нормы, на ппше (0) - в норме. Каждый ключ 4 состоит из трех элементов (злементы 9-14). Логический, блок 5 прогнозирования выполнен на логических элементах И (15-17) и ИЛИ (18). Указан пример его технической реализации по одному управляющему воздействию согласно дереву классификации ситуаций (фиг. 2). Для каждого управляющего воздействия логический блок прогнозирования имеет две выходные шины. Наличие сигнала на шине (-) указывает на необходимость уменьшить значение управляющего воздействия, на шине (+) - увеличить. При отсутствии сигналов на зтих шинах управляющее воздействие изменять не следует. При работе системы текущие значения контролируемых входных и промежуточных перемен ных технологического процесса преобразуются преобразователями 1 в трехразрядаый код. В момент появления в каком-либо разряде кода, отличного от нормы (возникла ситуация) на одном или нескольких входах блока импульсов включения генератора появится сигнал и блок 2 произведет включение генератора 3, который начинает генерировать импульсы через моменты времени, равные длительности переходных процессов в объекте управления. По каждому импульсу открываются электронные ключи 4 и код с преобразователей 1 поступает в логический блок 5 прогнозирования, выходной код которого в каждом разряде содержит информацию о направлении изменения одного из управляющих воздействий для устранения ситуации. В ходе технологического процесса значение переменной В„ уменьшается ниже допустимой величины. На шине (-1) преобразователя 1 этой контролируемой переменной появляется сигнал, образуется ситуация - совокупность кодов преобразователей 1. По импульсу от генератора 3 зта ситуация поступит в логический блок 5 прогнозирования. Согласно дереву классификации ситуаций (фиг. 2) одно из управляющих воздействий необходимо увеличить. При значении кода (-1) переменной В„ производится анализ переменной В и так как этот код - О (значение переменной норме). управляющее воздействие необходимо увеличит Логический блок 5 прогнозирования обеспечит выработку именно такого изменения данного управляющего воздействия ключей 4 переменных В1 сигналы присутствуют на выходах злементов 10 и 12, на выходе элемента 1 появится сигнал, который через элемент 18 по ступит на выходную пшну + (увеличить) блок прогнозирования. Выходы злементов 13 и 17 незадействованы, так как их сигналы соответствуют значению управляющего воздействия Не изменять. На других выходных ши нах блока 5 прогнозирования вырабатываются сигналы изменения значений соответствующих управляющих воздействий согласно деревьям классификации ситуаций. Выходные сигналы логического блока 5 про гнозирования преобразуются блоками 6 согласования в необходимые изменения управляющи воздействий на исполнительные органы 7. Бели по истечении времени переходныхпроцессов в объекте управления ситуация не была уст. ранена, то вырабатывается очередной сигнал управления. Генератор выключается при появлении значения Норма во всех разрядах выходного кода с преобразователей 1. Система дискретного управления технологическим процессом обладает следующими преимуществами. Так как ситуация характеризуется значениями контролируемых входных и промежуточных переменных объекта управления, то ее оперативное устранение предотвращает уход за установленные пределы значений выходных переменных объекта управления, при этом поддерживается неизменным качество вьшускаемой продукции. Вьшгрыщ будет наиболее значителен при управлении объектами с большими транспортными запаздываниями, в которых йзменения входных и промежуточных контролируемых переменных приводит к изменению выходных переменных через достаточно долгое время, например, в стекловаренных печах. Вследствие управления по деревьям классификации ситуаций система обладает свойствами экстраполяции на все возможные ситуации, а также обладает большим быстродействием, чем известные системы. Кроме того, для каждой ситуации сразу производится выработка коррекции, а в известных системах производится накопление признаков до трех. Формула изобретения Система даскретного управления технологическим процессом, содержащая блоки согласования, подключенные выходами ко входам исполнительных элементов, преобразователи аналогкод, соединенные входами с входами системы, а выходами - с первыми входами ключей, отличающаяся тем, что, с целью повышения быстродействия системы, в нее введены генератор импульсов, логический блок прогнозирования И блок импульсов включения генератора, подключешлш входами к выходам преобразователей аналог-код, а выходом через генератор импульсов - ко вторым входам ключей, выходы которых соединены с входами логического блока прогнозирования, подключенного выходами ко входам блоков согласования. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР N 332436, кл. G 05 В 15/02, 2.Авторское свидетельство СССР № 387338, кл. G 05 В 13/02 (прототип).
I
-f
0
+
Фиг. 2
