Заявленные технические решения объединены единым изобретательским замыслом, относятся к области контрольно-измерительной техники и могут быть использованы при бесконтактном контроле параметров, режимов работы и технического состояния электрооборудования переменного тока.
Известен способ использования квазиорбит для реализации задачи образного анализа технического состояния подшипников при экспресс-диагностике роторных машин, основанном на использовании фигур Лиссажу двух сигналов вибродатчиков, взаимно перпендикулярно установленных на опоре электродвигателя (Ковальский В.Н. и др. Образный анализ вибрационного состояния подшипниковых опор скольжения применительно к экспресс-диагностике роторных машин / Тезисы докладов 4-й Международной выставки и конференции «Неразрушающий контроль и техническая диагностика в промышленности». - М.: Машиностроение, 2005. - С.246).
Недостатком рассмотренного способа является значительная «зашумленность» сигнала из-за наличия высокочастотных составляющих, вследствие чего квазиорбиты представляются нечеткими «размытыми» кривыми, что ограничивает область их использования в решении задачи экспресс-диагностики только в качестве дополнительного к основному информационному признаку.
Известен способ диагностирования, основанный на регистрации изменения тока питания объекта контроля (Жердев Н.К., Креденцер Б.П., Белоконь Р.Н. Контроль устройств на интегральных схемах. - Киев: Техника, 1986. - С.87). Данный способ заключается в том, что ток питания любого элемента объекта контроля зависит от технического состояния этого элемента, поэтому при его переходе из одного состояния в другое изменяется общий ток, потребляемый объектом контроля. Принцип локализации отказавшего элемента при реализации способа заключается в подаче на вход объекта контроля импульса определенной длительности, при этом проверяемые элементы, входящие в объект контроля, должны быть включены последовательно. В том случае, если все элементы исправны, при их последовательном срабатывании происходит также последовательное изменение тока питания объекта контроля. В случае отказа первого элемента значение тока питания не изменяется ни разу, при отказе второго элемента значение тока изменяется однократно и т.д. Таким образом, номер отказавшего элемента (j) может быть определен по количеству изменений (N) значения тока питания объекта контроля: j=N+1. Из чего следует, что число изменений значения тока питания контролируемого объекта однозначно зависит от номера отказавшего элемента.
К недостаткам данного способа можно отнести отсутствие возможности определения реального технического состояния объекта контроля ввиду того, что измерения должны выполняться при выключенном объекте с использованием специальных генераторов и дополнительного оборудования, необходимого для формирования на входе контролируемого объекта импульса определенной длительности.
Известен способ экспресс-диагностики выпрямительных элементов блоков питания (Сукиязов А.Г., Просянников Б.Н. Способ экспресс-диагностики выпрямительных элементов блоков питания. А.с. СССР №1718159, 1989 г.), заключающийся в регистрации датчиком, размещенным вблизи трансформатора, временной зависимости магнитного поля рассеяния трансформатора, входящего в состав блока питания. Из выходного сигнала датчика, пропорционального напряженности магнитного поля рассеяния, выделяют информативный параметр и, сравнивая его спектральный состав со спектром опорного сигнала, используемого в качестве эталонного, получают информацию о техническом состоянии выпрямительных полупроводниковых элементов блока питания.
Недостатком данного способа является относительно низкая чувствительность к малым отклонениям параметров объекта.
Наиболее близким по технической сущности к заявленному способу (прототипом), является способ визуального контроля параметров энергопотребления и диагностики технического состояния электрооборудования переменного тока (см. патент RU №2378656, МПК G01R 19/20, G01R 11/00, опубликованный 10.01.2010, бюллетень №1), основанный на получении информации о параметрах энергопотребления и техническом состоянии электрооборудования (ЭО) по результатам анализа характера изменения формы тока, потребляемого ЭО. Сущность данного способа заключается в том, что формируют сигнал, снимаемый с датчика магнитного поля, пропорциональный напряженности внешнего магнитного поля, сопровождающего работу ЭО. Полученный сигнал, снимаемый с датчика магнитного поля, подключенного по схеме трансформатора тока к токопроводящим электрическую энергию проводам, питающим контролируемое ЭО, преобразуют с применением интегрирующего или (и) дифференцирующего звеньев. Подают сигнал с выхода датчика на горизонтальные (вертикальные) отклоняющие пластины, а сигнал с выхода интегрирующего (дифференцирующего) звена - на вертикальные (горизонтальные) отклоняющие пластины осциллографа и по результатам сравнения полученной формы кривой с набором эталонных кривых судят о режимах работы и техническом состоянии контролируемого ЭО.
Недостатками способа-прототипа, являются относительно большое время, необходимое для контроля технического состояния ЭО переменного тока, и субъективность выводов по результатам контроля, поскольку для идентификации технического состояния объекта контроля оператору необходимо визуально сравнить (X) значений коэффициента взаимного подобия эталонной и полученной кривой (мнемонической диаграммы). При этом X>>1, что обусловлено необходимостью обеспечения требуемой точности идентификации технического состояния ЭО (минимизацией вероятности ошибочной идентификации).
Известно устройство бесконтактного контроля состояния обмоток однофазных трансформаторов стержневого типа (А.Г. Сукиязов, В.Н. Гутников, Б.Н. Просянников, В.А. Варков. Устройство бесконтактного контроля состояния обмоток однофазных трансформаторов стержневого типа. А.с. СССР №1760477, 1992 г.), содержащее контролируемый однофазный трансформатор, датчик магнитного поля рассеяния, размещенный параллельно плоскости сердечника трансформатора, блок выделения составляющих токов и напряжения первичной и вторичной обмоток, блок усилителей - преобразователей, блок детекторов, блок пороговых усилителей, блок отображения информации.
Недостатком устройства является его высокая критичность к установке датчика магнитного поля, что усложняет процедуру определения технического состояния объекта, и высокая вероятность ошибочных выводов.
Известно устройство бесконтактного определения технического состояния тиристоров источника питания (Сукиязов А.Г. и др. Устройство бесконтактного определения технического состояния тиристоров источника питания по патенту RU №2185632, 2002 г.). Устройство содержит измеритель-преобразователь (датчик) внешнего магнитного поля, усилитель, два фазовых детектора, устройство формирования управляющей фазы, два усилителя-формирователя уровня, устройство логической обработки информации и устройство отображения информации.
Недостатками устройства являются низкая надежность его работы из-за большого количества элементов и функциональных связей между ними, сложности алгоритма получения информации.
Известно устройство, осуществляющее бесконтактный мониторинг полупроводниковых элементов однофазных и трехфазных мостовых выпрямителей (Сукиязов А.Г. и др. Устройство бесконтактного мониторинга полупроводниковых элементов однофазных и трехфазных мостовых выпрямителей.Патент на полезную модель №66820, 2007 г.), содержащее датчик напряженности магнитного поля, размещаемый вблизи трансформатора выпрямителя, усилитель сигнала датчика, полосовой фильтр и схему логической обработки сигнала датчика, содержащую компараторы, логические элементы и индикаторы технического состояния.
Недостатком данного устройства является узкая область его применения, ограниченная возможностью использования только для мостовых выпрямителей с трансформатором.
Наиболее близким к заявленному устройству автоматизированного контроля технического состояния электрооборудования (прототипом) является устройство бесконтактного контроля технического состояния и режимов работы электроустановок (Просянников Г.Б., Колесников А.Н., Вербов А.В. Устройство бесконтактного контроля технического состояния и режимов работы электроустановок. Патент на полезную модель №68136, 2007 г.), содержащее устройство обработки и устройство отображения информации, выполненное в виде двухпроводного шнура-удлинителя, который подключается между электроустановкой и электрической сетью, при этом в него введены дифференциальный трансформатор, две первичные обмотки которого формируются из обеих жил шнура-удлинителя бифилярно, а вторичная обмотка подключена к устройству обработки информации, кроме того, из одной жилы двухпроводного шнура-удлинителя формируется токовая обмотка, внутри которой размещен датчик магнитного поля, выход которого подключен к устройству обработки информации, которое осуществляет сравнение сигналов дифференциального трансформатора и датчика магнитного поля с набором эталонных значений информации о техническом состоянии электроустановки и формирует управляющий сигнал в зависимости от результатов сравнения, а выход подключен к входу устройства отображения информации.
Недостатком устройства-прототипа является относительно высокая вероятность ошибки при измерениях малых отклонений от нормы в режимах работы или в техническом состоянии контролируемых электроустановок, информационный признак, по которому производится диагностирование, изменится незначительно и может быть не зафиксирован. Этим объясняется его низкая достоверность идентификации технического состояния.
Техническим результатом, достигаемым с помощью заявленных способа и устройства автоматизированного контроля технического состояния электрооборудования, является повышение быстродействия и достоверности идентификации технического состояния ЭО и расширение области применения технических средств данного назначения.
В заявленном способе указанный технический результат достигается тем, что в известном способе автоматизированного контроля технического состояния электрооборудования, заключающемся в том, что на выходе датчика напряженности магнитного поля, индуктивно связанного с проводами электропитания оборудования, измеряют уровень сигнала, пропорционального напряженности изменяющегося во времени внешнего магнитного поля, создаваемого электрооборудованием в рабочем режиме, сдвигают по фазе измеренный сигнал на Δφ, по полученным данным идентифицируют техническое состояние ЭО, дополнительно формируют библиотеку описаний возможных технических ситуаций в электрооборудовании. Возможные технические ситуации запоминают в виде эталонных матриц технического состояния размерностью N×N. Генерируют совокупность N стробирующих импульсов через интервалы времени Δt=T/N, где T период измеренного сигнала, N≥2 число измерений в интервале Т. Измеряют мгновенные значения сигналов с выхода датчика напряженности магнитного поля Uднмп и сигнала Uдэ сдвинутого по фазе на Δφ. Результаты n-го измерения мгновенных значений Uднмп и Uдэ, где n=1, 2, …, N, оцифровывают и запоминают в виде векторов цифровой последовательности длинной N. Из полученных векторов цифровой последовательности длинной N формируют матрицу технического состояния размерностью N×N. Сформированную матрицу технического состояния сравнивают с эталонными матрицами технического состояния. Идентифицируют техническое состояние ЭО по наибольшему числу совпадений элементов сравниваемых матриц.
При этом индуктивная связь датчика магнитного поля с проводами электропитания оборудования выполнена по схеме трансформатора тока. Сдвиг по фазе на Δφ сигнала Uднмп выполняют с помощью операции дифференцирования.
Благодаря новой совокупности существенных признаков способа автоматизированного контроля технического состояния ЭО и введенной последовательности действий, основанной на применении двухэтапной процедуры контроля, обеспечивается повышение быстродействия и достоверности идентификации технического состояния ЭО.
В заявленном устройстве технический результат достигается тем, что в известном устройстве автоматизированного контроля технического состояния электрооборудования, содержащем источник переменного тока, первый выход которого подключен к первому входу ЭО, а второй через индукционные витки датчика напряженности магнитного поля подключен к второму входу ЭО, выход датчика напряженности магнитного поля подключен к информационному входу блока обработки сигнала, дополнительно введен блок идентификации технического состояния и места отказа в ЭО. Первый и второй информационные выходы блока обработки сигнала, а также его управляющий вход подключены к соответствующим входам и выходу блока идентификации технического состояния и места отказа в ЭО, управляющий вход «Включение» которого является управляющим входом устройства.
При этом блок обработки сигнала состоит из первого и второго электронных ключей, первого и второго аналого-цифрового преобразователя и дифференцирующего элемента. Управляющие входы электронных ключей объединены и являются управляющим входом блока. Входы первого и второго аналого-цифровых преобразователей подключены к выходам соответственно первого и второго электронных ключей, а выходы являются соответственно первым и вторым информационными выходами блока. Информационный вход дифференцирующего элемента подключен к информационному входу первого электронного ключа и является информационным входом блока, а его выход подключен к информационному входу второго электронного ключа.
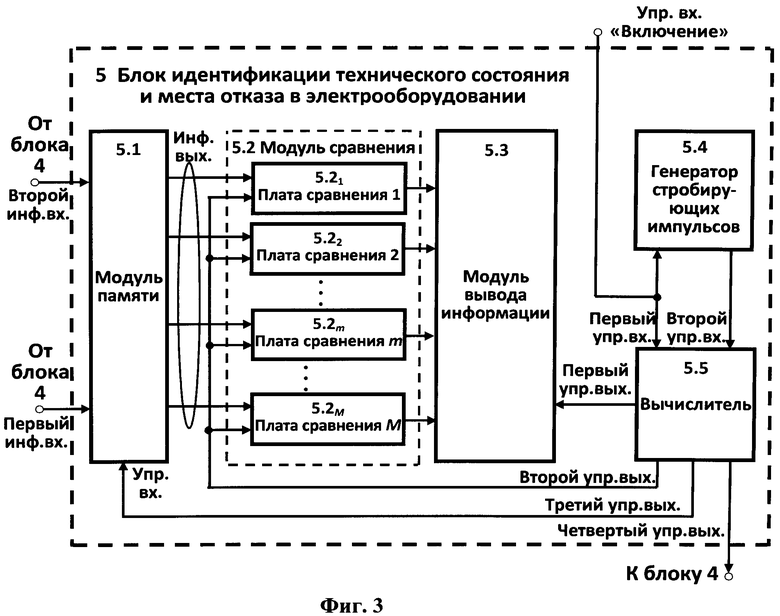
Блок идентификации технического состояния и места отказа в ЭО состоит из модуля памяти, первый и второй информационные входы которого являются соответствующими информационными входами блока, модуля сравнения, m-й информационный вход которого, где m=1, 2, …, M, а M - число возможных технических ситуаций в электрооборудовании, подключен к m-му информационному выходу модуля памяти, а m-й информационный выход модуля сравнения подключен к m-му информационному входу модуля вывода информации, управляющий вход которого подключен к первому управляющему выходу вычислителя, второй и третий управляющие выходы которого подключены соответственно к М управляющим входам модуля сравнения и управляющему входу модуля памяти соответственно, первый управляющий вход вычислителя подключен к управляющему входу генератора стробирующих импульсов и является управляющим входом «Включение» блока, выход генератора стробирующих импульсов подключен к второму управляющему входу вычислителя, четвертый управляющий выход которого является управляющим выходом блока, причем модуль сравнения состоит из M плат сравнения, управляющий вход, информационный вход и информационный выход m-й платы сравнения являются соответствующими m-ми управляющим, информационным входами и информационным выходом модуля сравнения.
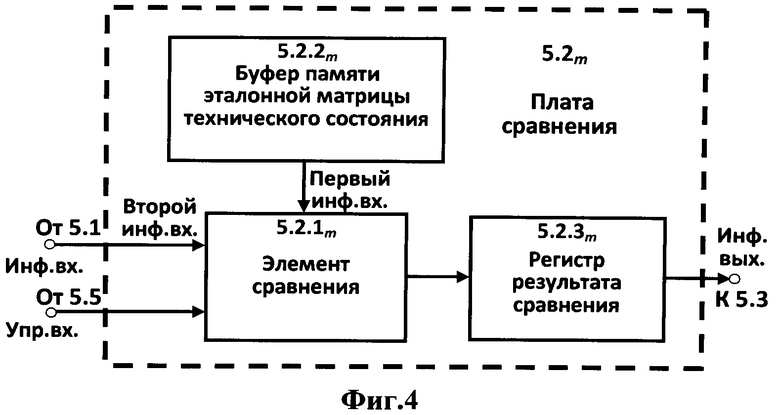
При этом плата сравнения состоит из буфера памяти эталонной матрицы технического состояния, выход которого подключен к первому информационному входу элемента сравнения, выход которого подключен к входу регистра результата сравнения, выход которого является информационным выходом платы сравнения. Второй информационный и управляющий входы элемента сравнения являются соответственно информационным и управляющим входами платы сравнения.
Вычислитель состоит из элемента «ИЛИ», T-триггера, первого, второго и третьего элементов «И», первого и второго электронных счетчиков и перемножителя, первый и второй входы которого подключены к выходу третьего элемента «И», первый вход которого объединены и подключены к входу первого электронного счетчика, к первому входу первого элемента «И» и является вторым управляющим входом вычислителя, а второй вход третьего элемента «И» подключен к инверсному выходу T-триггера и первому входу второго элемента «И», второй вход которого подключен к выходу первого электронного счетчика и второму входу элемента «ИЛИ», выход которого подключен к счетному входу T-триггера, прямой выход которого подключен к второму входу первого элемента «И», первый и второй управляющие выходы второго электронного счетчика, выходы второго и первого элементов «И» являются соответственно первым, вторым, третьим и четвертым управляющими выходами вычислителя, а первый вход элемента «ИЛИ» - его первым управляющим входом.
Благодаря перечисленной новой совокупности существенных признаков устройства автоматизированного контроля технического состояния электрооборудования обеспечивается повышение быстродействия и достоверности идентификации технического состояния за счет автоматизации процесса анализа и идентификации поступающей диагностической информации.
Сущность предлагаемого способа и устройства автоматизированного контроля технического состояния электрооборудования состоит в представлении диагностического пространства, содержащего информационные признаки отказов ЭО в виде векторов цифровой последовательности, из которых формируют матрицу технического состояния.
Идентификация технического состояния и места отказа в ЭО осуществляется на основании анализа изменений в цифровых последовательностях сформированных матриц технического состояния.
При этом предлагается контроль технического состояния ЭО переменного тока осуществлять в два этапа:
на первом этапе (этапе анализа) формируют библиотеку эталонных описаний возможных технических состояний ЭО (информационных признаков отказов) и запоминают их в виде эталонных матриц технического состояния g1…gM, размерностью N×N; преобразуют измеренный сигнал в матрицу технического состояния, которую запоминают.
на втором этапе (этапе идентификации) поэлементно сравнивают полученную матрицу технического состояния с эталонными матрицами технического состояния, идентифицируют техническое состояние ЭО по наибольшему числу совпадений элементов сравниваемых матриц.
Заявленные способ и устройство автоматизированного контроля технического состояния ЭО поясняются чертежами, на которых показаны:
на фиг.1 - структурная схема устройства автоматизированного контроля технического состояния электрооборудования;
на фиг.2 - функциональная схема блока обработки сигнала;
на фиг.3 - функциональная схема блока идентификации технического состояния и места отказа в электрооборудовании;
на фиг.4 - принципиальная схема платы сравнения;
на фиг.5 - принципиальная схема вычислителя;
на фиг.6 - алгоритм, реализующий двухэтапный способ автоматизированного контроля технического состояния электрооборудования;
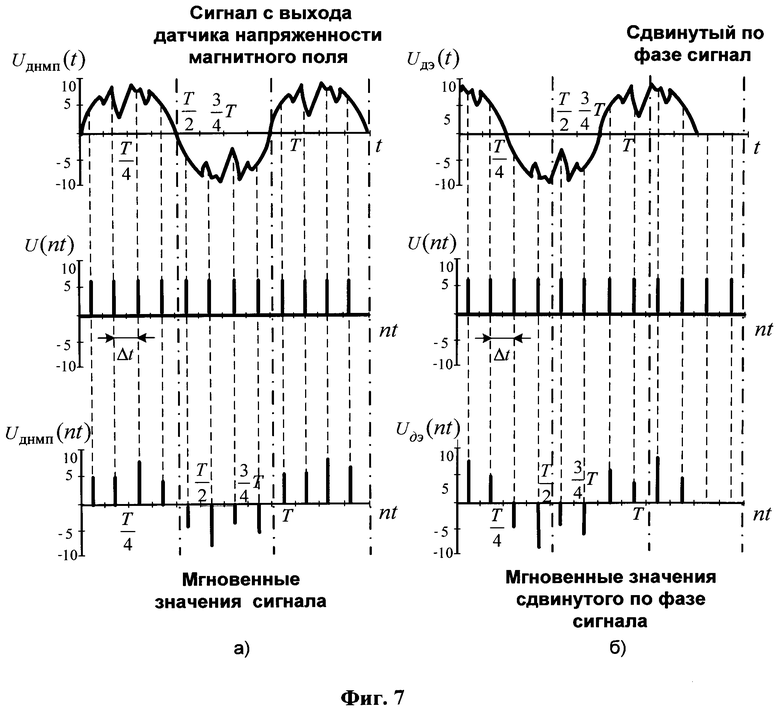
на фиг.7 - диаграммы, поясняющие процесс измерения мгновенных значений сигнала с выхода датчика напряженности магнитного поля Uднмп и сигнала Uдэ, сдвинутого по фазе на Δφ;
на фиг.8 - диаграммы и матрицы технического состояния, поясняющие этап анализа;
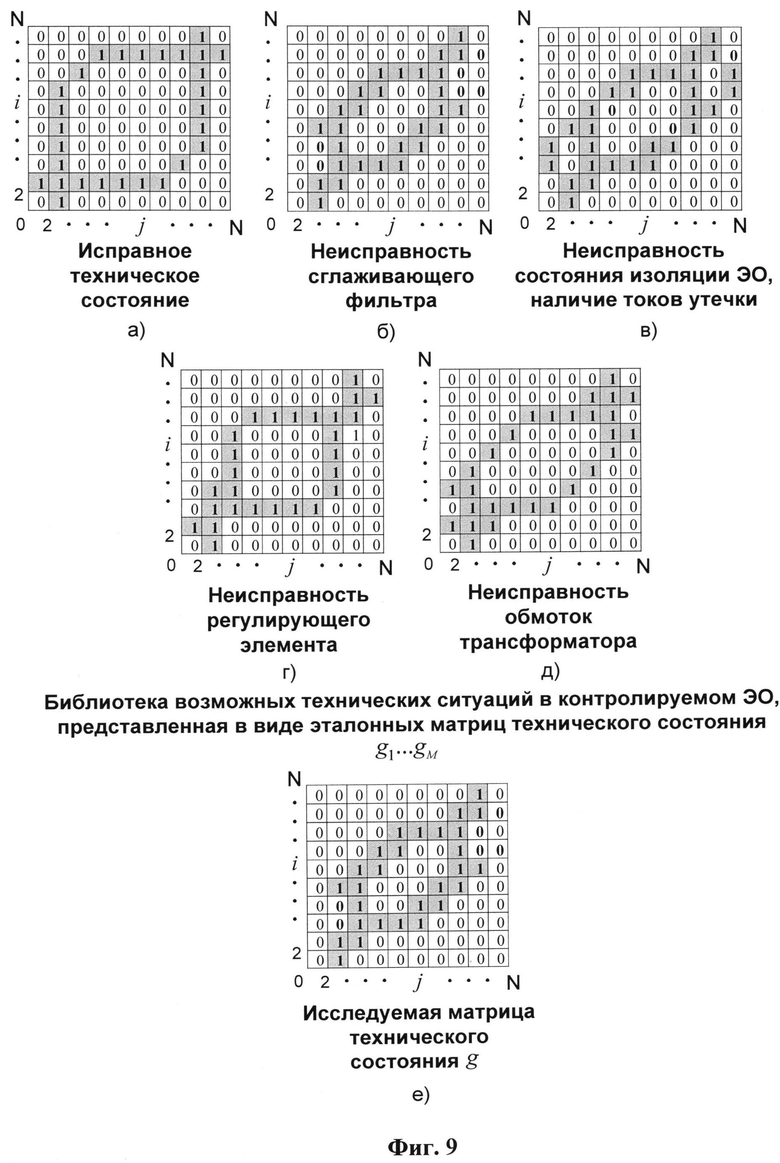
на фиг.9 - библиотека возможных технических ситуаций в контролируемом ЭО и исследуемая матрица технического состояния ЭО.
Реализация заявленного способа автоматизированного контроля технического состояния ЭО объясняется алгоритмом, представленным на фиг.6.
Первым этапом способа является этап анализа, на котором:
на шаге 1 формируют библиотеку описаний возможных технических ситуаций в электрооборудовании и запоминают их в виде эталонных матриц технического состояния gm, размерностью N×N, где m=1, 2, …, M, число возможных технических ситуаций в ЭО. Пример библиотеки возможных технических ситуаций в электрооборудовании, см. фиг.9 а-д, M=5;
на шаге 2 измеряют уровень сигнала Uднмп (t) с датчика напряженности магнитного поля, пропорционального напряженности изменяющегося во времени внешнего магнитного поля, создаваемого электрооборудованием в рабочем режиме (см. фиг.7а). Получение информации о техническом состоянии ЭО осуществляется на основании анализа характера изменений кинетики (формы) выходного сигнала с датчика напряженности магнитного поля, так как она взаимосвязана с кинетикой тока потребляемого ЭО;
на шаге 3 с использованием операции дифференцирования сдвигают по фазе измеренный сигнал на Δφ, где 
на шаге 4 генерируют совокупность N стробирующих импульсов через интервалы времени Δt=T/N, где T - период измеренного сигнала, N≥2, число измерений в интервале T. Количество измерений в интервале T должно удовлетворять условиям теоремы Котельникова Fдискр≥2Fнаив.гарм, то есть частота дискретизации (Fдискр) должны быть в два раза больше частоты наивысшей гармоники (Fнаив.гарм), содержащейся в спектре измеренного сигнала;
на шаге 5 измеряют мгновенные значения сигналов с выхода датчика напряженности магнитного поля Uднмп (см. фиг.7,а) и сигнала Uдэ (см. фиг.7,б), сдвинутого по фазе на Δφ, через интервалы времени Δt=T/N;
на шаге 6 оцифровывают измеренные мгновенные значения сигналов Uднмп(nt) и Uдэ(nt), где n=1, 2,…,N количество измерений в интервале T;
на шаге 7 запоминают полученные вектора цифровой последовательности длиной N, из которых формируют матрицу технического состояния g размерностью N×N (см. фиг.9е). Формируют матрицу технического состояния путем наложения векторов цифровой последовательности сдвинутого по фазе сигнала на вектора цифровой последовательности измеренного сигнала, можно выделить четкую взаимосвязь информативных изменений в цифровых последовательностях полученной матрицы с видом технической ситуации в контролируемом ЭО.
Вторым этапом способа является этап идентификации, на котором:
на шагах 12-14 поэлементно (после выбора элемента матрицы технического состояния g (шаг 5) и соответствующих элементов эталонных матриц технического состояния gM (шаги 9-11)) происходит сравнение исследуемой матрицы технического состояния с эталонными матрицами технического состояния. При этом под сравнением понимается операция сложения по модулю два, информационных содержаний сравниваемых элементов матриц;
на шагах 15-17 при совпадении значений в элементах сравниваемых матриц происходит суммирование числа совпадений;
на шагах 18-21 осуществляется сравнение элементов матриц снизу вверх и слева направо;
на шаге 22 выводится число совпадений, после того, как будет оценен последний элемент сравниваемых матриц, i=N,j=N (шаг 19, 21);
на шаге 23 определяется матрица по наибольшему числу совпадений исследуемой матрицы g с одной из эталонных матриц технического состояния gm;
на шаге 24 идентифицируют техническое состояние и место отказа в контролируемом ЭО по результатам анализа числа совпадений исследуемой матрицы с эталонными матрицами (шаг 23).
Заявленное устройство автоматизированного контроля технического состояния электрооборудования, показанное на фиг.1, состоит из источника переменного тока 1 (ИПТ), датчика напряженности магнитного поля 2 (ДНМП), электрооборудования 3 (ЭО), блока обработки сигнала 4 (БОС), блока идентификации технического состояния и места отказа в электрооборудовании 5 (БИТС), нескольких витков электрического провода, питающего электрооборудование 6.
При этом выходы ИПТ 1 (см. фиг.1) подключены соответственно к первому входу ЭО 3 и входу ДНМП 2, первый и второй выходы которого подключены соответственно к второму входу ЭО 3 и информационному входу БОС 4, первый и второй информационные выходы, а также управляющий вход которого подключены к соответствующим информационным входам и управляющему выходу БИТС 5, управляющий вход «Включение» которого является управляющим входом устройства.
ИПТ 1 предназначен для обеспечения электропитания ЭО 3 переменным током.
ДНМП 2 (см. фиг.1) предназначен для измерения индуктивным способом уровня сигнала, пропорционального напряженности изменяющегося во времени внешнего магнитного поля, создаваемого ЭО 3 в рабочем режиме. ДНМП 2 размещен в микроиндуктивном соленоиде - концентраторе из нескольких витков провода электропитания контролируемого оборудования, намотанного на диэлектрическую цилиндрическую трубку.
Вариант построения ДНМП 2 известен и описан, например на фиг.1 в патенте на изобретение RU №2378656 С2.
ЭО 3 предназначено для производства, преобразования, передачи, распределения или потребления электрической энергии переменного тока. Является объектом контроля технического состояния.
БОС 4, функциональная схема которого показана на фиг.2, предназначен для обработки и преобразования поступающего с ДНМП 2 сигнала, в вектора цифровых последовательностей, из которых формируют исследуемую матрицу технического состояния g и запоминают в модуле памяти 5.1 БИТС 5.
БИТС 5, функциональная схема которого показана на фиг.3, предназначен для поэлементного сравнения исследуемой матрицы технического состояния g (МТС), хранящейся в модуле памяти 5.1 с эталонными матрицами технического состояния gm (ЭМТС), где m=1, 2, …, M, а M - число возможных технических ситуации в ЭО 3, хранящимися соответственно в буферах памяти эталонных матриц технического состояния 5.2.2m плат сравнения 5.2m, анализа числа совпадений сравниваемых матриц, идентификации технического состояния ЭО 3 по наибольшему числу совпадений элементов сравниваемых матриц, отображения идентифицированного технического состояния и места отказа в ЭО 3 на модуле вывода информации.
БОС 4 в заявленном устройстве автоматизированного контроля технического состояния электрооборудования, показанный на фиг.2, состоит из дифференцирующего элемента 4.1, первого 4.2 и второго 4.3 электронных ключей, первого 4.4 и второго 4.5 аналого-цифровых преобразователей.
При этом в БОС 4 сигнал от ДНМП 2 поступает на первый 4.2 электронный ключ напрямую, а на второй 4.3 - через дифференцирующий элемент 4.1, управляющие входы которых объединены и являются управляющим входом БОС 4, а выходы соединены соответственно с входами первого 4.4 и второго 4.5 аналого-цифровых преобразователей (АЦП), выходы которых являются первым и вторым информационными выходами блока 4.
Дифференцирующий элемент 4.1 предназначен для преобразования сигнала Uднмп, поступающего с ДНМП 2, в сигнал Uдэ, сдвинутый по фазе на Δφ.
Первый 4.2 и второй 4.3 электронные ключи предназначены соответственно для подключения сигнала, поступающего от ДНМП 2, и сигнала, сдвинутого по фазе на Δφ к первому и второму АЦП соответственно.
Первый 4.4 и второй 4.5 АЦП предназначен для преобразования в цифровой вид сигнала с ДНМП 2 и сдвинутого по фазе сигнала.
Входящие в БОС 4 аналого-цифровые преобразователи, электронные ключи и дифференцирующий элемент известны и описаны, например, в [1].
БИТС 5 в заявленном устройстве автоматизированного контроля технического состояния электрооборудования, показанный на фиг.3, состоит из модуля памяти 5.1 (МП), модуля сравнения 5.2 (МС), модуля вывода информации 5.3 (МВИ), генератора стробирующих импульсов 5.4 (ГСИ) и вычислителя 5.5.
При этом первый и второй информационные входы БИТС 5 (см. фиг.3) являются соответственно первым и вторым информационными входами МП 5.1, а m-й его информационный выход, где m=1, 2, …, M, а M - число возможных технических ситуаций в ЭО 3, подключены к m-му информационному входу МС 5.2, m-й информационный выход которого подключен к m-му информационному входу МВИ 5.3, управляющий вход которого подключен к первому управляющему выходу вычислителя 5.5, второй и третий управляющие выходы которого подключены соответственно к М управляющим входам МС 5.2 и управляющему входу МП 5.1 соответственно, первый управляющий вход вычислителя 5.5 подключен к управляющему входу ГСИ 5.4 и является управляющим входом «Включение» блока 5, выход ГСИ 5.4 подключен к второму управляющему входу вычислителя 5.5, четвертый информационный выход которого является управляющим выходом блока 5, причем МС 5.2 состоит из M плат сравнения 5.2m, управляющий, информационный вход и информационный выход m-й платы сравнения являются соответствующими m-ми управляющим, информационным входами и информационным выходом МС 5.2.
МП 5.1 состоит из N×N ячеек памяти, расположенных аналогично матрице (N строк и N столбцов), предназначен для хранения в двоичном коде информации записанной в элементах МТС g.
МС 5.2 предназначен для сравнения исследуемой матрицы технического состояния (МТС) g с эталонными матрицами технического состояния (ЭМТС) gm, где m=1, 2,…, M число возможных технических ситуаций в ЭО 3.
МВИ 5.3 предназначен для отображения результатов идентификации технического состояния контролируемого ЭО 3.
ГСИ 5.4 предназначен для формирования управляющих импульсов в процессе выполнения этапов анализа и идентификации.
Вычислитель 5.5 предназначен для формирования управляющих воздействий на модули 5.1, 5.2, 5.3 БИТС 5 и ключи 4.2 и 4.3 БОС 4, в рамках синхронизации работы устройства и управления этапами контроля.
Входящие в рассмотренный БИТС 5 МП 5.1 и МВИ 5.3, а также ГСИ 5.4 известны и описаны соответственно в [1, 2].
Каждая m-я плата сравнения (ПС) 5.2m, МС 5.2 блока 5 заявленного устройства, представленная на фиг.4, состоит из элемента сравнения (ЭС) 5.2.1m, буфера памяти эталонной матрицы технического состояния (БПЭМ) 5.2.2m, регистра результата сравнения (РРС) 5.2.1m.
При этом в каждой m-й ПС 5.2m первый и второй информационные входы m-го ЭС 5.2.1m соединены с информационным входом платы и выходом m-го БПЭМ 5.2.2m соответственно, его управляющий вход является управляющим входом ПС 5.2m, а выход соединен со входом m-го РРС 5.2.3m, выход которого является информационным выходом m-й ПС 5.2m.
ЭС 5.2.1m предназначен для сравнения информации, записанной в элементах исследуемой МТС g и элементах ЭМТС gm, поступающей на его первый и второй информационные входы.
БПЭМ 5.2.2m предназначен для хранения информации, записанной в элементах ЭМТС gm, где m=1, 2, …, M, число возможных технических ситуаций в ЭО 3.
РРС 5.2.1m предназначен для записи двоичного кода сформированного в результате сравнения информации, записанной в исследуемой МТС g с информацией, записанной в ЭМТС gm.
Входящие в рассмотренные ПС 5.2m РРС 5.2.1m, ЭС 5.2.1m и БПЭМ 5.2.2m известны и описаны в [1].
Вычислитель 5.5 БИТС 5 заявленного устройства, показанный на фиг.5, состоит из: логического элемента «ИЛИ» 5.5.1; T-триггера 5.5.2; первого 5.5.3, второго5.5.4 и третьего 5.5.5 логических элементов «И»; первого 5.5.6 и второго 5.5.8 электронных счетчиков; перемножителя 5.5.7.
При этом второй управляющий вход вычислителя 5.5 соединен с первыми входами первого 5.5.3 и третьего 5.5.5 логических элементов «И» напрямую и с вторым входом второго 5.5.4 логического элемента «И» через первый электронный счетчик 5.5.6, выход которого также соединен со вторым входом логического элемента «ИЛИ» 5.5.1, первым входом которого является первый управляющий вход вычислителя 5.5, а выход подключен к счетному входу T-триггера 5.5.2, прямой выход которого поступает на второй вход первого 5.5.3, а инверсный выход на первый вход второго 5.5.4 и второй вход третьего 5.5.5 логических элементов «И», при этом выход третьего 5.5.5 логического элемента «И» соединен с обоими входами перемножителя 5.5.7, выход которого поступает на вход второго электронного счетчика 5.5.8, первый и второй выходы которого являются соответственно первым и вторым управляющими выходами вычислителя 5.5, а выходы первого 5.5.3 и второго 5.5.4 логических элементов «И» являются соответственно его третьим и четвертым управляющими выходами.
Логический элемент «ИЛИ» 5.5.1 предназначен для выполнения операции логического сложения.
T-Триггер 5.5.2, типовой T-триггер со счетным входом, предназначен для управления работой устройства.
Первый 5.5.3, второй 5.5.4 и третий 5.5.5 логические элементы «И» предназначены для выполнения операции логического умножения.
Первый 5.5.6 и второй 5.5.8 электронные счетчики предназначены для отсчета стробирующих импульсов, а также выдачи управляющих воздействий на элементы вычислителя и модуль сравнения БИТС 5.
Перемножитель 5.5.7 предназначен для перемножения стробирующих импульсов, поступающих на его входы. Коэффициент перемножения равен числу T, где T-период исследуемого сигнала. С выхода перемножителя импульсы следуют с частотой N×N/T.
Входящие в рассмотренный вычислитель электронные счетчики, логические элементы, Т-триггер и перемножитель известны и описаны в [1].
На фиг.8 изображены диаграммы и матрицы технического состояния, поясняющие этап анализа при следующих технических ситуациях: фиг.8,д - исправное техническое состояние ЭО 3, фиг.8,е - неисправное техническое состояние ЭО 3, вследствие неисправности сглаживающего фильтра. Фиг.8,а и б иллюстрируют временные эпюры исследуемого сигнала с выхода ДНМП 2, на фиг.8,в и г - представлен спектральный состав исследуемых сигналов изображенных на фиг.8,а и б соответственно.
Заявленное устройство автоматизированного контроля технического состояния электрооборудования работает следующим образом.
Перед началом работы T-триггер 5.5.2, МП 5.1, а также РРС 5.2.31…5.2.3M, находятся в исходном (обнуленном) состоянии. В БПЭМ 5.2.21…5.2.2M записана библиотека возможных технических ситуаций в ЭО 3 в виде эталонных матриц технического состояния, пример представлен на фиг.9,а-д.
При подаче сигнала на управляющий вход «Включение» БИТС напряжение подается на вход ГСИ 5.4 и через первый управляющий вход вычислителя 5.5, на первый вход логического элемента «ИЛИ» 5.5.1, с выхода логического элемента «ИЛИ» 5.5.1 на вход T-триггера 5.5.2 поступает сигнал, перебрасывая его в состояние логической «единицы». С прямого выхода T-триггера 5.5.2 напряжение положительной полярности подается на второй вход логического элемента «И 1» 5.5.3.
Исследуемый сигнал с ДНМП 2 регистрирующего изменения напряженности внешнего магнитного поля сопровождающего процесс токопотребления контролируемого ЭО 3, подается на информационные входы ключей 4.2 (непосредственно) и 4.3 (через дифференцирующий элемент 4.1). Стробирующие импульсы, поступающие с ГСИ 5.4 БИТС 5 через открытый логический элемент «И 1» 5.5.3 вычислителя 5.5 на управляющие входы ключей 4.2 и 4.3, обеспечивают отсчеты мгновенных значений исследуемого сигнала Uднмп (см. фиг.7,а) и сигнала сдвинутого по фазе Uдэ (см. фиг.7,б) через интервалы времени Δt=T/N, где T - период исследуемого сигнала. Результаты отсчетов подаются на входы АЦП 4.4 и 4.5 соответственно и далее в преобразованном виде на соответствующие информационные входы МП 5.1.
МП 5.1 состоит из N×N ячеек памяти, расположенных аналогично матрице (N строк и N столбцов). После каждого отсчета измеряемого сигнала результат в виде логической «единицы» записывается в (ab)-ю ячейку памяти, которая соответствует а-му уровню сигнала на выходе преобразователя 4.4 (а-я строка условной матрицы) и b-му уровню сигнала на выходе преобразователя 4.5 (b-й столбец условной матрицы). На фиг.9,е представлена сформированная и записанная в ячейках МП 5.1 МТС (логическим «единицам» соответствуют закрашенные элементы матрицы).
Стробирующие импульсы с выхода ГСИ 5.4 поступают также на вход первого электронного счетчика 5.5.6. При подсчете N-го импульса сигнал с выхода счетчика 5.5.6 подается через логический элемент «ИЛИ» 5.5.1 на счетный вход T-триггера 5.5.2, перебрасывающий его в состояние логического «нуля», после чего счетчик 5.5.6 обнуляется. Устройство переводится из режима анализа сигнала в режим идентификации результатов. При этом логический элемент «И 1» 5.5.3 закрывается, а напряжение положительной полярности с инверсного выхода T-триггера 5.5.2 открывает логический элемент «И 3» 5.5.5 для прохождения через него стробирующих импульсов с выхода ГСИ 5.4 на первый и второй входы перемножителя импульсов 5.5.7. Коэффициент перемножения равен числу T.
С выхода перемножителя 5.5.7 импульсы с частотой следования N×N/T поступают на второй электронный счетчик 5.5.8, выход которого подключен к управляющим входам ЭС 5.2.11…5.2.1M, первые информационные входы ЭС 5.2.11…5.2M подключены к выходам БПЭМ 5.2.21…5.1.1M, а вторые информационные входы ЭС 5.2.11…5.2.1M подключены к информационным выходам МП 5.1.
Кодовые последовательности с второго управляющего выхода электронного счетчика 5.5.8 обеспечивают последовательное сравнение информации, содержащейся в ячейках МП 5.1, с информацией, записанной в соответствующих ячейках БПЭМ 5.2.21-5.1.1M. При наличии логических «единиц» в ячейке МП 5.1 и в аналогичной (с тем же номером строки и столбца условной матрицы) ячейке памяти какого-либо БПЭМ 5.2.2m(1≤m≤M) с выхода соответствующего ЭС 5.2.1m сигнал логической «единицы» поступит в соответствующий РРС 5.2.3m. После сравнения последней (N×N)-й ячейки МП 5.1 номер РРС 5.2.3m с максимальным числом логических «единиц» будет соответствовать номеру БПЭМ 5.2.2m, в котором записана информация ЭМТС, в наибольшей степени соответствующая содержанию исследуемой МТС, записанной в МП 5.1.
Выходы РРС 5.2.31-5.13M подключены к информационным входам МВИ 5.3. После поступления (N×N)-го импульса с перемножителя 5.5.7 на вход электронного счетчика 5.5.8 с его первого управляющего выхода подается разрешающий сигнал на управляющий вход МВИ 5.3, который отображает результаты идентификации технического состояния ЭО 3.
Так как (N×N)-й импульс на выходе второго электронного счетчика 5.5.8 соответствует N-му импульсу, подсчитанному первым электронным счетчиком 5.5.6 на втором этапе работы устройства, то с выхода счетчика 5.5.6 через логический элемент «И 2» 5.5.4, открытый напряжением с инверсного выхода T-триггера 5.5.2, через третий управляющий выход вычислителя 5.5 подается сигнал на управляющий вход МП 5.1 для его «обнуления». Этот же сигнал с выхода первого электронного счетчика 5.5.6 поступает через логический элемент «ИЛИ» 5.5.1 на счетный вход T-триггера 5.5.2, перебрасывая его в состояние логической «единицы». Устройство переключается в исходное положение и готово к работе в первом режиме - анализа сигнала.
Для подтверждения возможности достижения указанного технического результата было проведено математическое моделирование. Проведенное математическое моделирование показало высокую эффективность от заявленного технического решения. Крайне незначительные изменения спектрального состава в области высоких гармоник (фиг.8,в и г) приводят к хорошо заметным изменениям в цифровых последовательностях формируемых матриц технического состояния контролируемого ЭО (фиг.8,д и е).
Суммарная длительность работы заявленного технического решения на двух этапах (анализа и идентификации) равна 2T (двум периодам исследуемого сигнала), что значительно быстрее, чем при контроле объекта с помощью прототипа, когда время визуальной идентификации технического состояния равно

где Tотобр - время отображения мнемонической диаграммы на электронном осциллографе, примерно равное T периоду измеренного сигнала;
T1 - время, необходимое оператору на визуальное восприятие и сравнение мнемонической диаграммы с набором эталонных диаграмм, причем T1>>2T.
Таким образом, заявляемые способ и устройство обладают существенным положительным эффектом, заключающимся в повышении быстродействия и достоверности идентификации технического состояния ЭО и расширении области применения технических средств данного назначения.
Литература
1. Шило В.Л. Популярные микросхемы КМОП: Справочник. - М.: Горячая линия - Телеком, 2001. - 112 с. (Массовая радиобиблиотека; Вып.1246).
2. Микушин А.В., Сажнев A.M., Сединин В.И. Цифровые устройства и микропроцессоры. - Спб.: БХВ - Петербург, 2010. - 832 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО КОМПЛЕКСНОГО КОНТРОЛЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ РАДИОЭЛЕКТРОННОГО ОБОРУДОВАНИЯ | 2018 |
|
RU2702129C1 |
| СПОСОБ И УСТРОЙСТВО ГИБРИДНОЙ КОММУТАЦИИ ЦИФРОВЫХ КАНАЛОВ СВЯЗИ, ГЕНЕРАТОР СЕТЕВОГО ТРАФИКА И МОДУЛЬ ИДЕНТИФИКАЦИИ | 2013 |
|
RU2527729C1 |
| СПОСОБ И УСТРОЙСТВО ГИБРИДНОЙ КОММУТАЦИИ РАСПРЕДЕЛЕННОЙ МНОГОУРОВНЕВОЙ ТЕЛЕКОММУНИКАЦИОННОЙ СИСТЕМЫ, БЛОК КОММУТАЦИИ И ГЕНЕРАТОР ИСКУССТВЕННОГО ТРАФИКА | 2014 |
|
RU2542906C1 |
| СПОСОБ ПЕРЕДАЧИ ТЕЛЕМЕТРИЧЕСКОЙ ИНФОРМАЦИИ, АДАПТИРОВАННЫЙ К РАЗЛИЧНЫМ СИТУАЦИЯМ, ПОЯВЛЯЮЩИМСЯ ПРИ ПРОВЕДЕНИИ ИСПЫТАНИЙ РАКЕТНО-КОСМИЧЕСКОЙ ТЕХНИКИ, И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2571584C2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ РАДИОЭЛЕКТРОННЫХ ОБЪЕКТОВ | 2003 |
|
RU2239218C1 |
| УСТРОЙСТВО ДЛЯ СИГНАЛИЗАЦИИ ОТКЛОНЕНИЙ ПАРАМЕТРОВ ПРИ ДОПУСКОВОМ КОНТРОЛЕ | 2016 |
|
RU2617982C1 |
| СПОСОБ ГИБРИДНОЙ КОММУТАЦИИ ЦИФРОВЫХ КАНАЛОВ СВЯЗИ | 2000 |
|
RU2195080C2 |
| АССОЦИАТИВНЫЙ ВЫЧИСЛИТЕЛЬ СМЕЩЕНИЯ ЦЕНТРА ТЕКУЩЕГО ИЗОБРАЖЕНИЯ ОТ ЦЕНТРА ЭТАЛОННОГО | 1991 |
|
RU2029358C1 |
| СПОСОБ РАСПРЕДЕЛЕННОГО КОНТРОЛЯ И АДАПТИВНОГО УПРАВЛЕНИЯ МНОГОУРОВНЕВОЙ СИСТЕМОЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2450335C1 |
| Способ многоуровневого комплексного контроля технического состояния радиоэлектронных систем | 2018 |
|
RU2694158C1 |





Изобретение относится к области контрольно-измерительной техники и может быть использовано при бесконтактном контроле технического состояния электрооборудования переменного тока. Сущность предлагаемого способа и устройства автоматизированного контроля технического состояния электрооборудования состоит в представлении диагностического пространства, содержащего информационные признаки отказов электрооборудования в виде векторов цифровой последовательности, из которых формируют матрицу технического состояния. Идентификация технического состояния и места отказа в электрооборудовании осуществляется на основании анализа изменений в цифровых последовательностях сформированных матриц технического состояния. При этом предлагается контроль технического состояния электрооборудования осуществлять в два этапа: на первом этапе (анализа) формируют библиотеку эталонных описаний возможных технических состояний электрооборудования (информационных признаков отказов), и запоминают их в виде эталонных матриц технического состояния, а измеренный с датчика напряженности магнитного поля сигнал и преобразованный в матрицу технического состояния также запоминают; на втором этапе (идентификации) поэлементно сравнивают полученную матрицу технического состояния с эталонными матрицами технического состояния, идентифицируют техническое состояние электрооборудования по наибольшему числу совпадений элементов сравниваемых матриц. Технический результат заключается в повышении быстродействия и достоверности идентификации технического состояния электрооборудования. 2 н. и 6 з.п. ф-лы, 9 ил.
1. Способ автоматизированного контроля технического состояния электрооборудования, заключающийся в том, что на выходе датчика напряженности магнитного поля, индуктивно связанного с проводами электропитания оборудования, измеряют уровень сигнала, пропорционального напряженности изменяющегося во времени внешнего магнитного поля, создаваемого электрооборудованием в рабочем режиме, сдвигают по фазе измеренный сигнал на Δφ, по полученным данным идентифицируют техническое состояние электрооборудования, отличающийся тем, что дополнительно формируют библиотеку описаний возможных технических ситуаций в электрооборудовании и запоминают их в виде эталонных матриц технического состояния размерностью N×N, генерируют совокупность N стробирующих импульсов через интервалы времени Δt=T/N, где T - период измеренного сигнала, N≥2 число измерений в интервале T, измеряют мгновенные значения сигналов с выхода датчика напряженности магнитного поля Uднмп и сигнала Uдэ, сдвинутого по фазе на Δφ, результаты n-го измерения Uднмп и Uдэ, где n=1,2,…,N, оцифровывают и запоминают в виде векторов цифровой последовательности длиной N, из которых формируют матрицу технического состояния размерностью N×N, которую сравнивают с эталонными матрицами, а техническое состояние электрооборудования идентифицируют по наибольшему числу совпадений элементов сравниваемых матриц.
2. Способ по п.1, отличающийся тем, что индуктивная связь датчика магнитного поля с проводами электропитания оборудования выполнена по схеме трансформатора тока.
3. Способ по п.1, отличающийся тем, что сдвиг по фазе на Δφ сигнала Uднмп выполняют с помощью операции дифференцирования.
4. Устройство автоматизированного контроля технического состояния электрооборудования, содержащее источник переменного тока, первый выход которого подключен к первому входу электрооборудования, а второй через индукционные витки датчика напряженности магнитного поля подключен к второму входу электрооборудования, выход датчика напряженности магнитного поля подключен к информационному входу блока обработки сигнала, отличающееся тем, что дополнительно введен блок идентификации технического состояния и места отказа в электрооборудовании, первый и второй информационные выходы блока обработки сигнала, а также его управляющий вход подключены к соответствующим входам и выходу блока идентификации технического состояния и места отказа электрооборудования, управляющий вход «Включение» которого является управляющим входом устройства.
5. Устройство по п.4, отличающееся тем, что блок обработки сигнала состоит из первого и второго электронных ключей, управляющие входы которых объединены и являются управляющим входом блока, первого и второго аналого-цифровых преобразователей, входы которых подключены к выходам соответственно первого и второго электронных ключей, а выходы первого и второго аналого-цифровых преобразователей являются соответственно первым и вторым информационными выходами блока, дифференцирующего элемента, информационный вход которого подключен к информационному входу первого электронного ключа и является информационным входом блока, а выход дифференцирующего элемента подключен к информационному входу второго электронного ключа.
6. Устройство по п.4, отличающееся тем, что блок идентификации технического состояния и места отказа в электрооборудовании состоит из модуля памяти, первый и второй информационные входы которого являются соответствующими информационными входами блока, модуля сравнения, m-й информационный вход которого, где m=1, 2, …, M, а M - число возможных технических ситуаций в электрооборудовании, подключен к m-му информационному выходу модуля памяти, а m-й информационный выход модуля сравнения подключен к m-му информационному входу модуля вывода информации, управляющий вход которого подключен к первому управляющему выходу вычислителя, второй и третий управляющие выходы которого подключены соответственно к M управляющим входам модуля сравнения и управляющему входу модуля памяти соответственно, первый управляющий вход вычислителя подключен к управляющему входу генератора стробирующих импульсов и является управляющим входом «Включение» блока, выход генератора стробирующих импульсов подключен к второму управляющему входу вычислителя, четвертый управляющий выход которого является управляющим выходом блока, причем модуль сравнения состоит из M плат сравнения, управляющий вход, информационный вход и информационный выход m-й платы сравнения являются соответствующими m-ми, управляющим, информационным входами и информационным выходом модуля сравнения.
7. Устройство по п.6,отличающееся тем, что плата сравнения состоит из буфера памяти эталонной матрицы технического состояния, выход которого подключен к первому информационному входу элемента сравнения, выход которого подключен к входу регистра результата сравнения, выход которого является информационным выходом платы сравнения, а второй информационный и управляющий входы элемента сравнения являются соответственно информационным и управляющим входами платы сравнения.
8. Устройство по п.6, отличающееся тем, что вычислитель состоит из элемента «ИЛИ», T-триггера, первого, второго и третьего элементов «И», первого и второго электронных счетчиков и перемножителя, первый и второй входы которого объединены и подключены к выходу третьего элемента «И», первый вход которого подключен к входу первого электронного счетчика, к первому входу первого элемента «И» и является вторым управляющим входом вычислителя, а второй вход третьего элемента «И» подключен к инверсному выходу T-триггера и первому входу второго элемента «И», второй вход которого подключен к выходу первого электронного счетчика и второму входу элемента «ИЛИ», выход которого подключен к счетному входу T-триггера, прямой выход которого подключен к второму входу первого элемента «И», первый и второй управляющие выходы второго электронного счетчика, выходы второго и первого элементов «И» являются соответственно первым, вторым, третьим и четвертым управляющими выходами вычислителя, а первый вход элемента «ИЛИ» является первым управляющим входом вычислителя.
| СПОСОБ ВИЗУАЛЬНОГО КОНТРОЛЯ ПАРАМЕТРОВ ЭНЕРГОПОТРЕБЛЕНИЯ И ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ЭЛЕКТРООБОРУДОВАНИЯ ПЕРЕМЕННОГО ТОКА | 2008 |
|
RU2378656C2 |
| Моторный грейфер | 1945 |
|
SU68136A1 |
| Способ экспресс-диагностики выпрямительных элементов блоков питания | 1989 |
|
SU1718159A1 |
| GB 784367 A, 09.10.1957 | |||
| CN 1221882 A, 07.07.1999 | |||

