(54) ПНЕ ВШМЕХАНИЧЕСКИЙ ИНТЕ ГРАТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневмомеханический интегратор | 1980 |
|
SU930322A2 |
| Пневмомеханический интегратор | 1980 |
|
SU922778A1 |
| Устройство для определения углового положения коленчатого вала двигателя | 1987 |
|
SU1483317A1 |
| Автомат контроля параметров тормозной втулки дорожного велосипеда | 1989 |
|
SU1652837A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РЕАКТОРОМ ПОЛУНЕПРЕРЫВНОГО ДЕЙСТВИЯ | 2005 |
|
RU2294237C2 |
| Фотоэлектрический преобразователь угла поворота вала в последовательность электрических импульсов | 1983 |
|
SU1146802A1 |
| Способ и установка для определения вариативности передаточного отношения редуктора | 2016 |
|
RU2658138C1 |
| Стенд для контроля выходных характеристик спиральных пружин | 1990 |
|
SU1732196A1 |
| Двухотсчетный преобразователь угла поворота вала в код | 1985 |
|
SU1269265A1 |
| Анализатор частотного спектра | 1980 |
|
SU900209A1 |
J
Изобретение относится к устрой ствам пневмоавтоматики и может исг пользоваться, например, для автоматического суммирования расхода i aтериалов в дозирующих весовых устройствах циклического действия.
Известен пневматический интегратор, содержащий командное устройство, два реле, две ячейки аналоговой памяти, элемент сравнения триггер с раздельными входами, счетчик импульсов и задатчики.
Недостатком этого интегратора является его сложность и низкая ность суммирования.
Наиболее близким по технической сущности к предлагаемому является пневматичеЬкий интегратор, содержащий счетчик импульсов, триггер с раздельньади входами, входной канал, первый и второй каналы управления, а также ком андное устройство, два реле, два сумматора, три ячейки аналоговой памяти, элемент сравнения, два импульсатора, элемент ИЛИ и задатчики 2.
Недостатком этого интегратора является его сложность и, как следствие этого, низкая точность суммирования.
Цель изобретения - повышение точности интегратора.
Поставленная цель достигается тем, что в интеграторе, содержащем счетчик
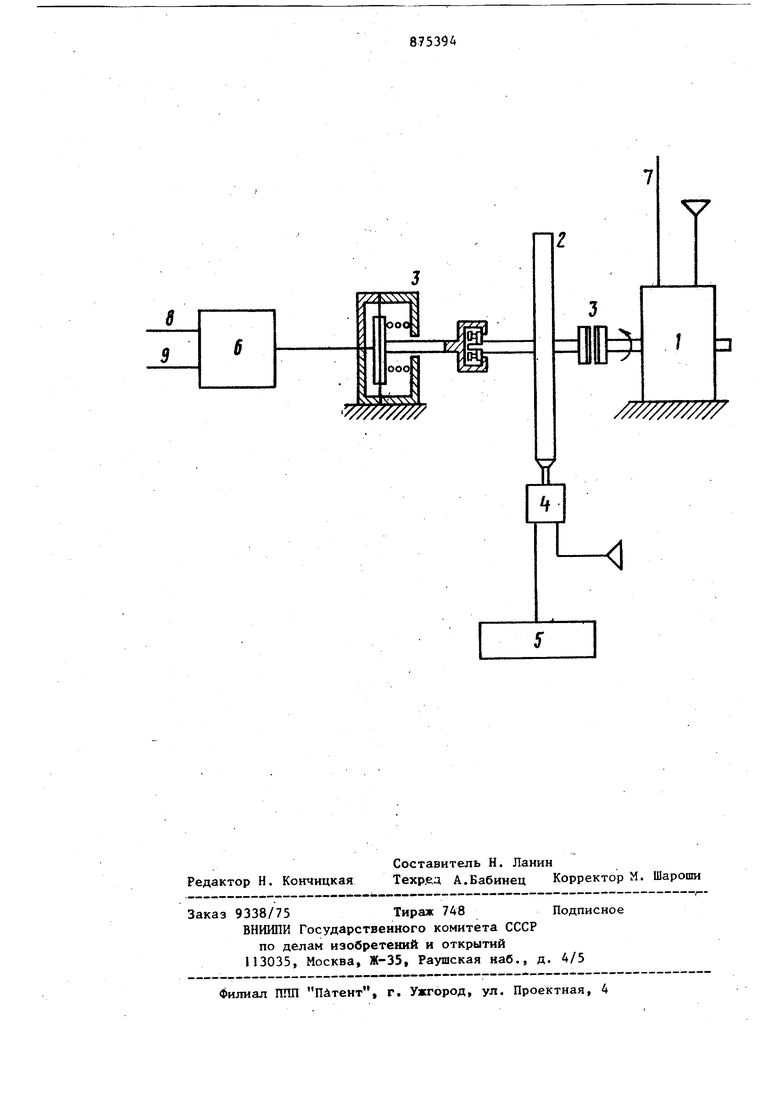
10 импульсовi триггер с раздельными входами, входной канал, первый и второй каналы управления, установлены преобразователь давление-угол поворота , подключенный к входному канаtsлу, отсчетный диск, управляемая муфта, через которую вал отсчетного диска связан с соосно расположенным выходным валом преобразователя давление-угол поворота, и конечный вы20ключатель, механический вход которого связан с отсчетнымдиском, а пневматический выход - со счетчиком импульсов,, причем входы триггера с граэдельными входами соединены с первым и вторым каналами управления, а его выход - со входом управляемой му ты. . На чертеже приведена принципиальная схема интегратора. Интегратор содержит преобразователь I давление-угол поворота, отсчетный диск 2, управляемую муфту 3, конечный выключатель 4, счетчик 5 импульсов и триггер 6 с раздельными входами. Вход преобразователя 1 соединен с входным каналом 7 интегратора, вал отсчетного диска 2 расположен соосно с выходным валом преобразователя 1, управляемая муфта 3 связывает вал преобразователя 1 с в лом отсчетного диска 2, конечный вы лючатель А установлен с возможностью взаимодействия, с отсчетным дис ком 2, выход конечного выключателя подключен ко входу счетчика 5 импул сов, вход управляемой муфты 3 соеди нен с выходом триггера 6, первый вход которого подключен к первому ка налу 8 управления, а второй вход к второму каналу 9 управления. Интегратор работает следующим об разом. По первому каналу 8 управления (включение исполнительного механизма загрузки дозатора) на вход триггера 6 поступает импульсный сигнал 1, триггер 6 взводится и сигнал с его выхода поступает на вход упра ляемой муфты 3, которая соединяет вал отсчетного диска 2 с валом преобразователя 1. При поступлении на входной канал 7, соединенный со вхо дом преобразователя 1, давления от датчика веса (не показан), выходной вал преобразователя поворачивается на угол, пропорциональный входному давлению и поворачивает на тот же угол соединенный с ним муфТой 3 отсчетный диск 2. При включении разгрузки дозатора по второму каналу 9 управления (включение исполнительного механизма разгрузки дозатора) на второй вход триггера 6 поступает импульсны сигнал 1, триггер 6 сбрасывает си нал на своем выходе, муфта 3 отсоединяет вал отсчетного диска 2 от ва преобразователя 1, давление в канале / снижается за счет разгрузки до О (0,2 кгс/см),вал преобразовате ля Г возвращаете в исходное положение, а отсчетный диск 2 остает44ся в прежнем положении, и шкала, нанесенная на диске, показывает величину взвешенной дозы. В следующем цикле взвешивания отсчетный диск 2 вновь начинает поворот, суммируя последующий вес с первым, и т.д. Конечный выключатель 4 и счетчик 5 осуществляют счет полных оборотов отсчетного диска 2. В случае неполной разгрузки дозатора, например при ручном управлении, вал преобразователя 1 останавли вается в положении, большем О (0,2 кгс/см ) и пропорциональном остатку. Следукщий счет производится от этой точки, учитывая остаток от прежнего взвешивания. Применение пневмомеханического интегратора значительно упрощает его устройство, сокращает количество входящих в него элементов, исключает ячейки памяти и сумматоры, ухудшающие надежность работы интегратора, и повышает точность интегрирования до точности работы преобразователя давление- угол поворота. При применении преобразователей компенсационного типа погрешность не превышает 0,5%. Формула изобретения Пневмомеханический интегратор, со держащий счетчик импульсов, триггер с раздельными входами, входной канал, первый и второй каналы управления, отличающийся тем, что, с целью повьш1ения точности интегратора, в нем установлень преобразователь давление-угол поворота, подключенный к входному каналу, отсчетный диск, управляемая муфта, через которую вал отсчетного диска связан с соосно расположенным выходным аалом преобразователя давлениеугол поворота, и конечный выключатель, механический вход которого связан с отсчетным диском, а пневматический выход - со счетчиком импульсов, причем входы триггера с раздельными входами соединены с первым и вторым каналами управления, а его выход - со входом управляемой муфты . Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 360667, кл. G06 G 5/00, 1970. 2.Авторское свидетельство ССС7 №487397, кл. G 06G 5/00, 1973 (прототип).
