1
(21)4709184/10
(22)26.06.89
(46) 30.05.91. Бюл. № 20
(72) В.М.Купрейченко, В.М.Родин,
В.Ф.Самсонов и Н.С.Титова
(53)531.781(088.8)
(56)Авторское свидетельство СССР № 210440, кл. G 01 L 3/00, 1968.
Авторское свидетельство СССР 800726, кл. G 01 L 3/02, 1979.
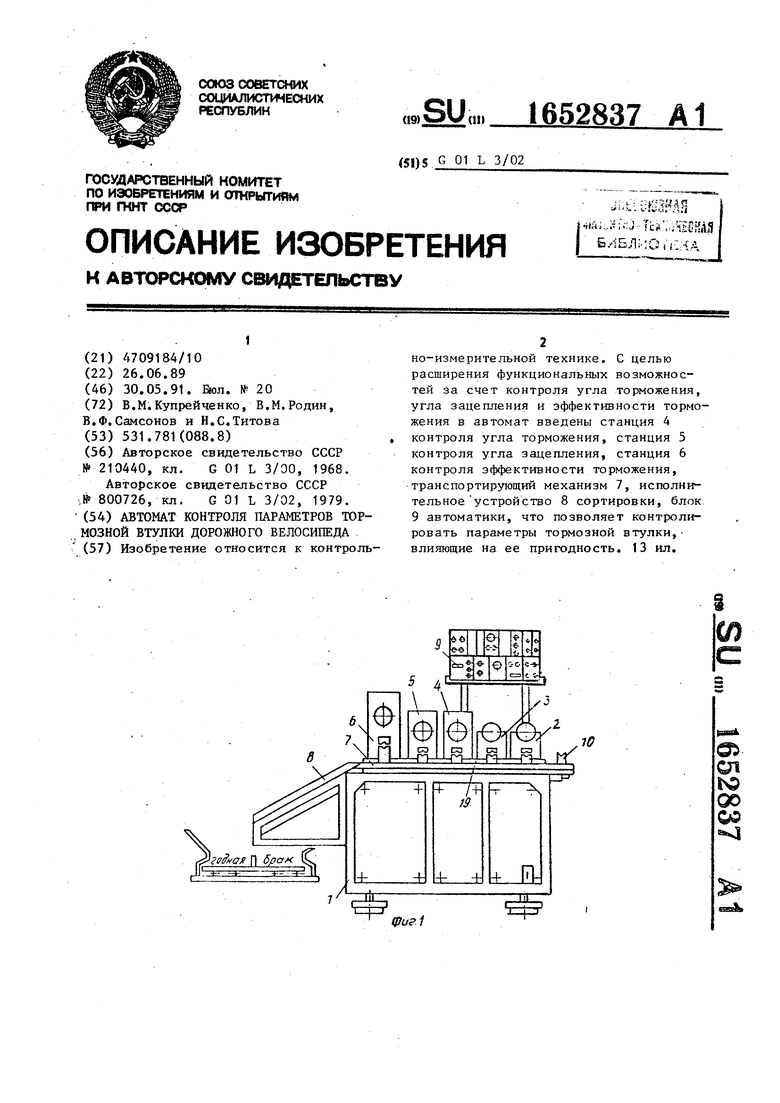
(54)АВТОМАТ КОНТРОЛЯ ПАРАМЕТРОВ ТОРМОЗНОЙ ВТУЛКИ ДОРОЖНОГО ВЕЛОСИПЕДА
(57)Изобретение относится к контрольно-измерительной технике. С целью расширения функциональных возможностей за счет контроля угла торможения, угла зацепления и эффективности торможения в автомат введены станция 4 контроля угла торможения, станция 5 контроля угла зацепления, станция 6 контроля эффективности торможения, транспортирующий механизм 7, исполнительное устройство 8 сортировки, блок 9 автоматики, что позволяет контролировать параметры тормозной втулки, влияющие на ее пригодность. 13 ил.

| название | год | авторы | номер документа |
|---|---|---|---|
| Автомат для сборки конических подшипников | 1990 |
|
SU1787226A3 |
| АВТОМАТ ДЛЯ КЛЕЙМЕНИЯ И РАЗМЕТКИ ДЕТАЛЕЙ | 1967 |
|
SU216469A1 |
| Автомат для контроля и сортировки деталей и устройство управления автоматом для контроля и сортировки деталей | 1983 |
|
SU1135500A1 |
| Устройство для позиционированияРАбОчЕгО ОРгАНА | 1975 |
|
SU820651A3 |
| УСТРОЙСТВО ДЛЯ ДИАГНОСТИРОВАНИЯ ПНЕВМОГИДРАВЛИЧЕСКОГО ТОРМОЗНОГО ПРИВОДА ТРАНСПОРТНОГО СРЕДСТВА | 1992 |
|
RU2025346C1 |
| Устройство для дробления материалов | 1982 |
|
SU1085627A1 |
| Манипулятор | 1982 |
|
SU1009754A1 |
| Испытательный стенд для стартера двигателя внутреннего сгорания | 1979 |
|
SU855419A1 |
| Автомат для контроля и сортировки колец | 1987 |
|
SU1556768A1 |
| Устройство для точного останова электропривода | 1978 |
|
SU921007A1 |


3 (Л
О
СП
00
со
«
Изобретение относится к измерительной технике, в частности для контроля параметров тормозных втулок дорожного велосипеда при их массовом производстве.
Цель изобретения - расширение функциональных возможностей за счет определения угла торможения, угла зацепления и эффективности торможе- ния.
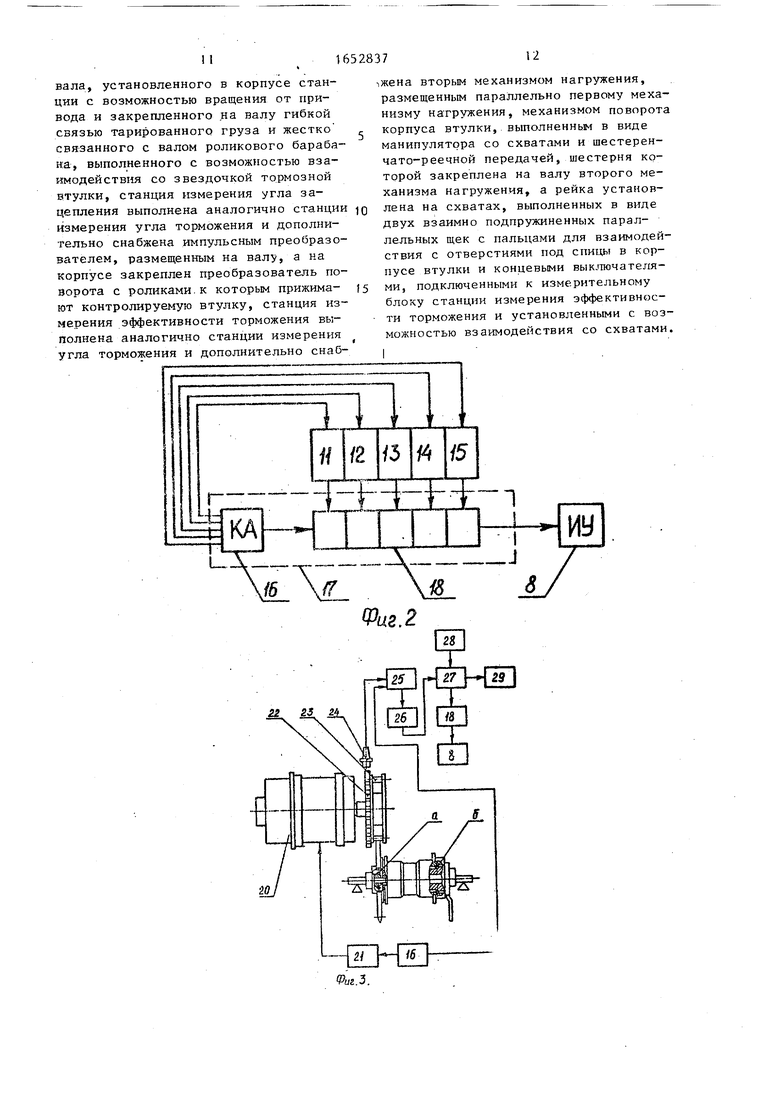
На фиг. 1 схематически изображено устройство автомата, общий вид-; на фиг. 2 - принципиальная блок-схема; на фиг. 3 - станция измерения потерь на трение с приводом на звездочку; на фиг. 4 - то же, с приводом на корпус; на фиг. 5 - станция измерения угла торможения; на фиг. 6 - сечение А-А на фиг. 5; на фиг. 7 - станция измерения угла зацепления; на фиг.8- вид Б на фиг. 7; на фиг. 9 - сечение В-В на фиг. 7; на фиг. 10 - станция измерения эффективности торможения; на фиг. 11 - сечение Г-Г на фиг. 10; на фиг. 12 - вид Д на фиг. 10; на фиг. 13 - блок-схема связей автомата контроля потерь на трение в узлах тормозной втулкио
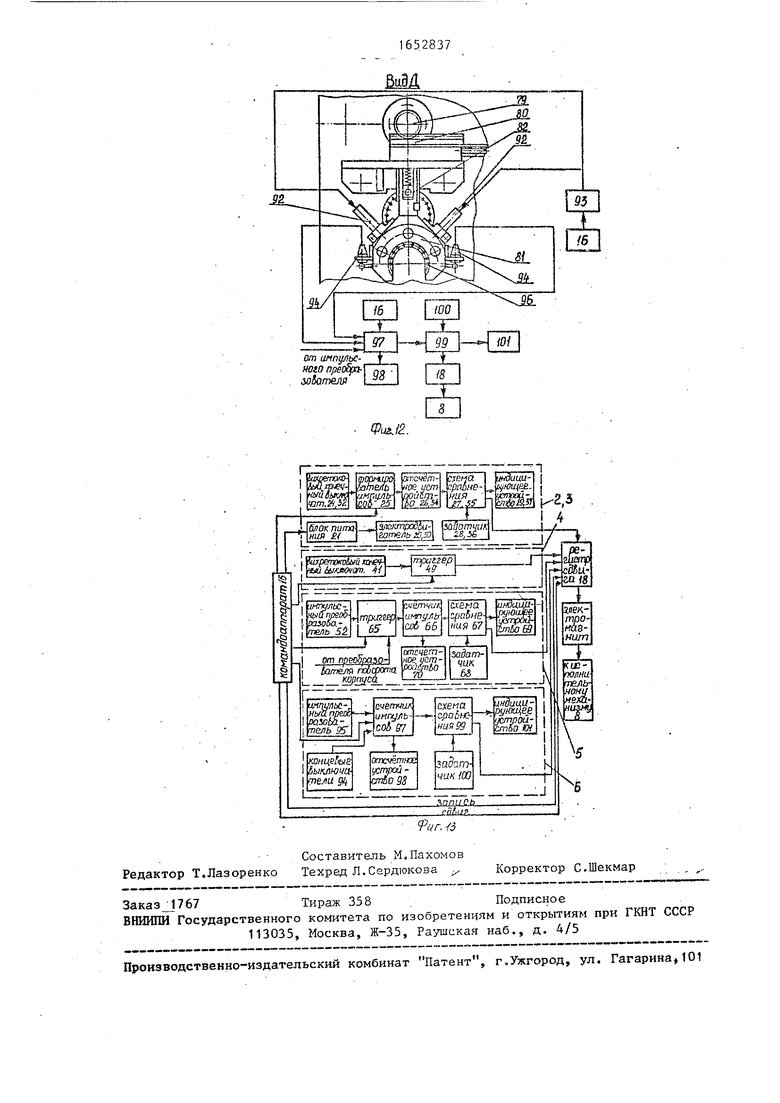
Автомат контроля параметров тор- мозной втулки дорожного велосипеда (фиг. 1,2) содержит станину 1, на которой установлены пять станций 2- 6 измерения, связанных между собой грейферным транспортирующим механиз- мом 7, исполнительное устройство 8 сортировки, блок 9 автоматики и позицию 10 загрузки. Каждая станция 2-6 имеет соответственно измерительный блок с датчиком 11-15, своим входом связанный с выходом командо- аппарата 16, входящего в блок 17 управления и подключенного к регистру 18 сдвига, соединенного входами с измерительными блоками с датчиками 11-15 и выходом с исполнительным устройством 8 сортировки. Командо- аппарат 16 представляет собой кулачковый вал с вихре токовыми конечными выключателями, связанный с приводом. Измерительные станции 2-6 связаны между собой направляющей 19, предназначенной для опоры рычага контролируемой тормозной втулки. Станция 2 измерения потерь на трение с приводом на звездочку втулки (фиг. 3) содержит электродвигатель 20 постоянного тока, получающий напряжение от блока 21 питания и управляемый от командоаппарата 16 импульсный преобразователь, состоящий из вращающегося отсчетного диска 22 с роликовым барабаном 23, установленным на валу электродвигателя 20 постоянного тока, и вихретокового концевого выключателя 24, соединенного с первым входом формирователя 25 импульсов, подключенным вторым входом к коман- доаппарату 16, а выходом - к входу отсчетного устройства 26, выход которого соединен с первым входом схемы 27 сравнения, с вторым входом которой соединен задатчик 28. Схема 27 сравнения одним выходом соединена с индицирующим устройством 29, а вторым - с вторым входом регистра 18 сдвига, соединенным выходом с исполнительным устройством 8 сортировки, разделяющим проконтролированные втулки на годные и брак.
Станция 3 измерения потерь на трение с приводом на корпус втулки (фиг. 4) содержит электродвигатель 30 постоянного тока, получающий напряжение от блока 21 питания и управляемый от командоаппарата 16, импульсный преобразователь, состоящий из вращающегося отсчетного диска 31 и вихретокового концевого выключателя подключенного к первому входу формирователя 25 импульсов, к второму входу которого подключен командоап- парат 16 и фрикционный ролик 33 для проворота корпуса втулки.
Формирователь 25 импульсов через отсчетное устройство ЗА подключен к первому входу схемы 35 сравнения, соединенной вторым входом с задатчи- ком 36, первым выходом - с индицирующим устройством 37 и вторым выходом - с третьим входом регистра 18 сдвига, подключенного выходом к исполнительному устройству 8 сортировки.
Станция 4 измерения угла торможения (фиг. 5) содержит вал 38, установленный в корпусе станции, на одно конце которого закреплен роликовый барабан 39 для взаимодействия со зведочкой контролируемой втулки и флажок АО, взаимодействующий с вихре токовым концевым выключателем 41. На другом конце вала 38 закреплен шкив А2 с грузом A3, создающим тарированный момент торможения. Плавный подъем и опускание груза 43 осуществляется рычажно-uiecTPi ..нчатым механизмом
(фиг. 6), содержащим зубчатую шестерню 44, находящуюся в зацеплении с зубчатым сектором 45, закрепленным на валу 46 и кинематически связанным рычажной передачей 47 с кулачком 48, получающим вращение от привода. Концевой выключатель 41 подключен к первому входу триггера 49, второй вход которого соединен с командоаппара- том 16, а выход - с четвертым входом регистра 18 сдвига, соединенным с исполнительным устройством 8 сортировки.
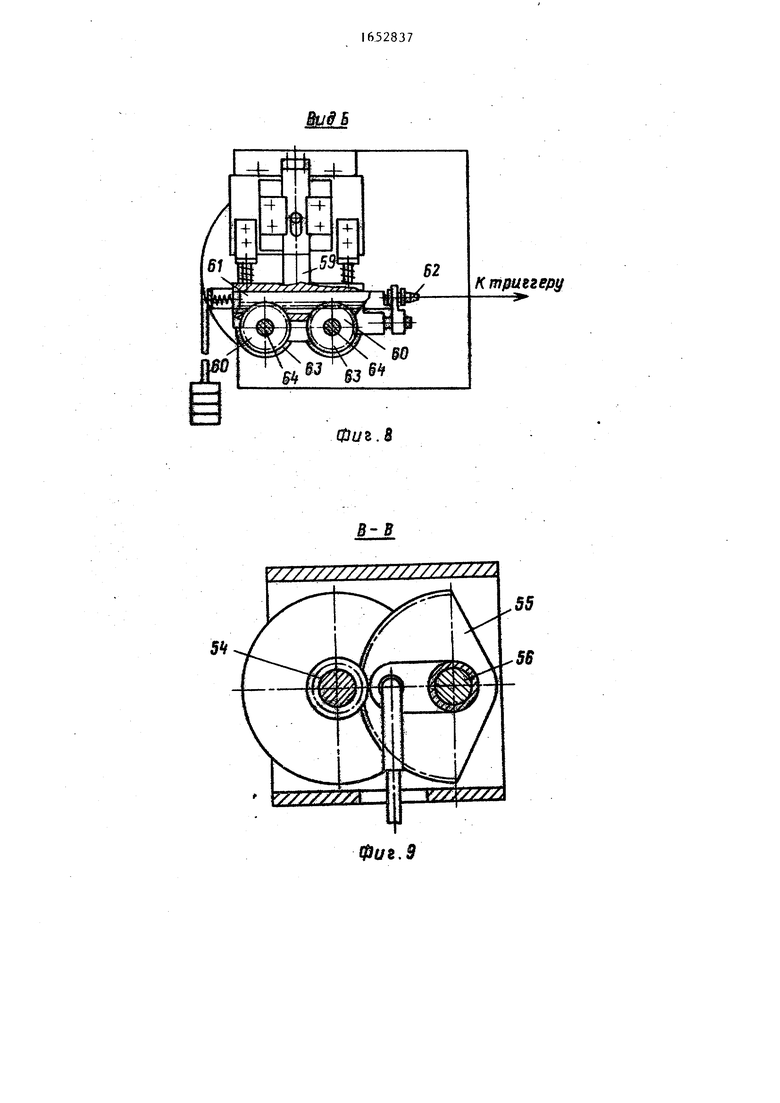
Станция 5 измерения угла зацепления (фиг. 7) содержит вал 50, на одном конце которого закреплен роликовый барабан 51 для взаимодействия со звездочкой контролируемой втулки, а на другом конце - импульсный преобразователь 52, шкив с грузом 53, создающим тарированный момент торможения, рычажно-шестеренчатый механизм, включающий закрепленную на валу 50 зубчатую шестерню 54, находящуюся в зацеплении с зубчатым сектором 55 (фиг. 9), закрепленный на валу 56 и кинематически связанным рычажной передачей 57 с: кулачком 58, получающим вращение от привела. На корпусе станции 5 закреплен преобразователь 59 поворота корпуса втулки (фиг. 8), выполненный в виде шесте- ренчато-реечной передачи и имеющий ве зубчатые шестерни 60, установ пенные на одной оси с возможностью взаимодействия с рейкой 61, перемещение которой фиксируется вихретоко- вым концевым выключателем 62. Преобразователь 59 поворота корпуса контактирует с корпусом втулки посредством пары роликов 63, расположенных на одной оси 64 с шестернями 60. Вихре токовой концевой выключатель 62 подключен к первому входу триггера 65, формирующего логическт 1 сигнал о годности или дефектности втулки, к торому входу которого подключен импульсный преобразователь 52, к третьму входу - командоаппарат 16, а выод соединен с входом счетчика 66
мпульсов, первый выход которого соеинен с первым входом схемы 67 сравения, к второму входу которого подключен задатчик 68, первый выход соеинен с инициирующим устройством 69, а второй выход - с пятым входом регистра 18 сдвига, подключенным к исполнительному устройству 8 сортиров0
0
5
0
5
0
5
0
5
ки, а счетчик 66 импульсов вторым выходом подключен к отсчетному устройству 70, индицирующему количество поступающих импульсов от импульсного преобразователя 52.
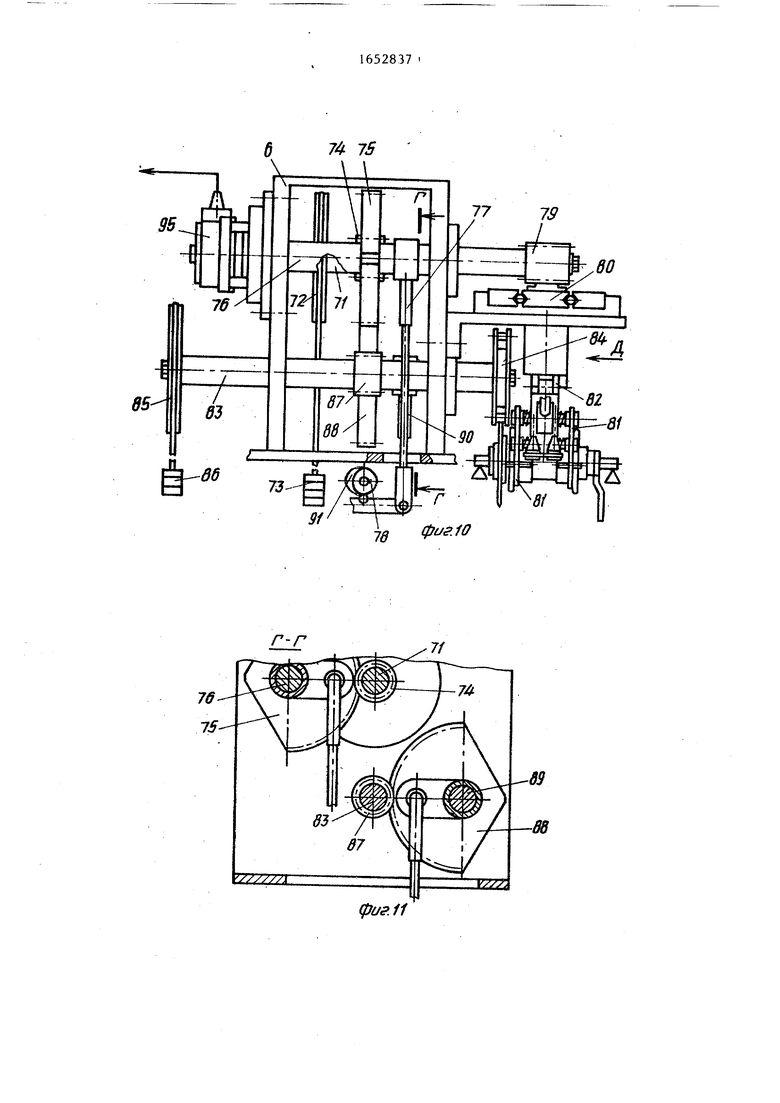
Станция 6 измерения (контроля) эффективности торможения (фиг. 10) содержит механизм поворота втулки, выполненный в виде вала 71, на котором закреплены шкив 72 с тарированным грузом 73, создающим тарированный крутящий момент на корпусе в гулки, шестерня 74, находящаяся в зацеплении с зубчатым сектором 75, закрепленным на палу 76 и кинематически связанным посредством рычажной передачи 77 с кулачком 78, шестерня 79, приводящая в возвратно-поступательное перемещение зубчатую рейку 80, связанную со схватами 81 манипулятора 82, и механизм погружения, содержащий вял 83 с роликовым барабаном 84 на одном конце для взаимодействия со звездочкой и тулки, шкивом 85 с тарированным грузом 86 на другом конце и шестерней
87,соединенной с зубчатым сектором
88,установленным на валу 89, и рычажную передачу 90, кинематически связанную с кулачком 91 привода (фиг1. 11). Манипулятор 82 (фиг. 12) содержит два пневмоцилиндра 92, которые через пневмопереключатель 93 связаны с командоаппаратом 16, и четыре вихре токовых концевых выключателя 94, разрешающих включение ггм- пульсного преобразователя 95, установленного на конце вала 71 (фиг.10), при вхождении пальцев 96 схватов 81
в отверстия под спицы втулки. Вихре- токовые концевые выключатели 94 подключены выходами к первому входу счетчика 97 импульсов, к второму входу которого подключен импульсный преобразователь 95, к третьему входу - командоаппарат 16. а первый выход подключен к входу отсчетного устройства 98, второй выход - к первому входу схемы 99 сравнения, второй вход которой соединен с задатчиком 100, первый выход соединен с индицирующим устройством 101, а второй - с шестым входом регистра 18 сдвига, соединенного выходом с исполнительным устройством 8 сортировки, индицирующее устройство 101 высвечивает сигнал Брак или Годная, а от- счетное устройство 98 индицирует ко- I
личество поступающих импульсов от импульсного преобразователя 95.
Автомат работает следующим образом.
Все рабочие перемещения функциональные узлы получают от кулачкового вала через электродвигатель (не показано). Тормозная нтулка загрузочным устройством (не показано) базируется на позиции 10 загрузки и грейферным транспортирующим механизмом 7 перемещается к первой станции 2 контроля потерь на трение, где останавливается и поднимается до зацепления звездочки контролируемой втулки с роликовым барабаном 23 (фиг. 3). От командоаппарата 16 включается электродвигатель 20 постоянного тока, приводящий во вращение функциональные узлы тормозной втулки на подшипниках а и б в течение времени, достаточного для установления
устойчивого числа оборотов (около 8с). Далее от комаидоаппарата 16 в соответствии с циклограммой работы автомата включается формирователь 25 импульсов и вихре токовый концевой выключатель 24 импульсного преобразователя. Полученное в двоично-десятичном коде число импульсов в единицу времени, соответствующее количеству оборотов контролируемой втулки, .формируется отсчетным устройством 26, этот код сравнивается в схеме 27 сравнения с кодом числа оборотов образцовой, устанавливаемым за- датчиком 28. Сигнал о результате сравнения высвечивается индицирующим устройством 29 и через регистр 18 сдвига информация запоминается и передается к исполнительному устройству 8. Далее грейферным транспортирующим механизмом 7 тормозная втулка выходит из зацепления с роликовым барабаном 23, опускается и передается на вторую позицию контроля потерь на трение, где поднимается и поджимается своим корпусом к обрезиненно- му фрикционному полику 33 (фиг. 4). Далее выполняется контроль потерь на трение тормозной втулки на подшипник б и в по схеме, аналогичной схеме первой станции.
На третьей станции контролируется угол торможения. Тормозная втулка вновь вводится в зацепление с роли- ковым барабаном 39 (фиг. 5), после чего вся система устанавл геается в
10
15
20
25
6528378
исходное положение (положение растор- моженности контролируемой втулки) посредством кулачка 48 в соответствии с циклограммой работы автомата. При этом флажок 40 устанавливается в положение начала контроля, а от командоаппарата 16 включается вихретоко- вый концевой выключатель 41 и триггер 49. Далее при повороте кулачка 48 груз 43 плавно опускается до момента срабатывания тормоза контролируемой втулки. Вся система останавливается, ролик рычажной передачи 47 открывается от профиля кулачка 48 на величину, зависящую от угла торможения, тормозная втулка при этом загружается тарированным моментом. В процессе нагружения флажок 40 поворачивается и взаимодействует с вихретоко- вым концевым выключателем 41; при пересечении поверхностью флажка поля вихретокового концевого выключателя триггер 49 посылает в регистр 18 сдвига и далее в исполнительное устройство 8 сигнал 1 (угол торможения превышает допустимый).
Если флажок не лоходит до поля вихретокового концевого выключателя 41, триггер 49 формирует сигнал О, и тормозная втулка признается годной.
На четвертой станции контролируется угол зацепления. Тормозная втулка вводится в зацепление с роликовым барабаном 51 (фиг. 7), четырьмя фрикционными роликами 63 поджимается к корпусу контролируемой втулки. Фрикционные ролики 63 одновременно препятствуют случайному повороту корпуса контролируемой втулки при реверсировании устройства контроля угла зацепления. Кулачок 58 плавно опускает груз 53 до момента срабатывания тормоза контролируемой втулки. Далее от командоаппарата 16 включаются триггер 65, формирующий сигнал разрешения счета счетчику 66 импульсов, преобразователь 59 поворота корпуса, импульсный преобразователь 52. При повороте роликового барабана 51 счетчик 66 импульсов отсчитывает импульсы соответственно углу поворота до срабатывания преобразователя 59 поворота корпуса. Полученное в двоично- десятичном коде число импульсов в единицу времени сравнивается схемой 67 сравнения с образцовым, установленным задатчиком 68, и высвечивается отсчетным устройством 70. Сигнал
30
35
40
45
50
55
о результате сравнения высвечивается индицирующим устройством 69 и через регистр 18 сдвига в соответствии с циклограммой работы автомата переда- ется к исполнительному устройству 8 (магнит заслонки сортировочного устройства). Если количество импульсов на счетчике меньше заданного числа, то тормозная втулка признается год- ной. Далее грейферным транспортир то- щим механизмом 7 (фиг. I) тормозная втулка выходит из зацепления с опускаемым роликовым барабаном 51 и передается на пятую позицию контроля эффективности торможения, где поднимается и вводится в зацепление с роликовым барабаном 84 (фиг. 10).
Для оценки эффективности торможения к звездочке прилагается тариро- ванный тормозной момент. Эффективность торможения оценивается приложением к корпусу тормозной втулки контрольного нормированного момечтл.
В том случае,если втулка развивает необходимый момент торможения, ее корпус не должен провернуться вокруг оси. Станция 6 контроля эффективности торможения работает следующим образом. После торможения (аналогично схемам контроля угла торможения и угла зацепления) кулачок 78 приводит в действие рычажный механизм 77, сектор 75, зубчатое колесо 74, в результате чего опускается 73 и через зубчатое колесо перемещает зубчатую рейку 80, которая нагружает контрольным крутящим моментом корпус тормозной втулки через схваты 81 манипулятора 82. Параллельно от командоаппа- рата 16 через пневмопереключатель УЗ срабатывают пневмоцилиндры 92, досылающие пальцы схватов 81 манипулятора 82 в отверстия под спицы в корпусе тормозной втулки. После того, как пальцы схватов манипулятора 82 вошли в отверстия срабатывают вихретоковые концевые выключатели 94, дающие команду на включение импульсного преобразователя 95. Манипулятор 82 на- гружает корпус тормозной втулки контрольным моментом, а импульсный преобразователь 95 отсчитывает импульсы соответствующие углу поворота схватов манипулятора 82. Полученное счет чиком 97 импульсов в двоично-десятичном коде число импульсов в единицу времени сравнивается схемой 99 сравнения с образцовым, установленным задатчиком 100, высвечивается отсчет- ным устройством 98 и через регистр 18 сдвига в соответствии с циклограммой работы автомата передается к исполнительному устройству 8. В случае несоответствия полученного сигнала заданному загорается светодиод индицирующего устройства 10. При соответствии измеряемого сигнала заданному свотпдиод не загорается. Проконтролированные тормозние втулки перемещаются к исполнительному устройству 8 сортиропки (фиг. 1), где но команде от блоков зпектроматоав- томатики 9 сортируются на две группы Годная и Брак, сбрасываются на ленточный транспортер и отводятся к месту нлкоппення р-пбракпваннон продукции.
Формула изобретения
I
Автомат контроля параметров тормозной втупки дорожного велосипеда, содержащий станину, установленный на ней привод, станцию измерения потерь на трение в подшипниковых узлах втулки, состоящую из измерительных блоков с электроприводом постоянного тока, механизм базирования и нагру- жения, датчики скорости, подключенны к входу измерительного блока, о т - л и ч а ю щ и и с я тем, что, с цепь расширения функциональных возможностей за счет определения угла торможения, угла зацепления и эффективности торможения, автомат снабжен станцией измерения угла зацепления, станцией измерения эффективности торможения, транспортным механизмом, свзывающим все станции И1мерения, направляющей для рычага тормозной втулки, закрепленной на станине между измерительными станциями, блоком управления, содержащим комлндоаппарат. размещенный на распределительном валу, регистр сдвига и подключенное к выходу регистра сдвига исполнительное устройство, при этом тактовый вход регистра сдвига соединен с первым выходом командоаппарата, л информационные входы - с выходами соответствующих измеритепьных блоков станций, выходы командоаппарата соединены с соответствующими измерительными блоками станций, станция измерения угла торможения содержит механизм нат руженкя, выполненный в виде
вала, установленного в корпусе станции с возможностью вращения от привода и закрепленного на валу гибкой связью тарированного груза и жестко связанного с валом роликового барабана, выполненного с возможностью взаимодействия со звездочкой тормозной втулки, станция измерения угла зацепления выполнена аналогично станции измерения угла торможения и дополнительно снабжена импульсным преобразователем, размещенным на валу, а на корпусе закреплен преобразователь поворота с роликами к которым прижима- ют контролируемую втулку, станция измерения эффективности торможения выполнена аналогично станции измерения угла торможения и дополнительно снаб жена вторым механизмом нагружения, размещенным параллельно первому механизму нагружения, механизмом поворота корпуса втулки, выполненным в виде манипулятора со схватами и шестерен- чато-реечной передачей, шестерня которой закреплена на валу второго механизма нагружения, а рейка установлена на схватах, выполненных в виде двух взаимно подпружиненных параллельных щек с пальцами для взаимодействия с отверстиями под спицы в корпусе втулки и концевыми выключателями, подключенными к измерительному блоху станции измерения эффективности торможения и установленными г возможностью взаимодействия со схватами.
1
3/
ФигЛ
Фиг 5
Y//S//A f W///////1
Фм. 6
ДА
(риг
Фиг. В
К триггеру
Фиг. 9
01глф в{
J-J
/ff
SL U
a8ZS9l
от преоопдьо- «ЭР угт7
(отеля rrixwa.
горпцса - чилi
bJJ
г
