(54) ВИНТОВОЙ ПРЕСС
I
Изобретение относится к машиностроению, в частности к конструкции оборудования для обработки давлением.
По основному авт. св. № 766890, извес. тен винтовой пресс, содержащий станину, в направляющих которой установлен ползун, имеющий привод от винтового механизма, состоящего из гайки, установленной в поперечине станины, и винта, на верхнем конце которого установлен маховик и усеченный конус, на боковой поверхности Q которого выполнены две повернутые одна относительно другой на угол 180° спиральные винтовые канавки, которые связаны с гибким звеном, один конец которого жестко закреплен в одной из канавок в верхней части конуса, намотан на эту канавку по 15 всей ее длине, охватывает связанный с электродвигателем ролик и жестко закреплен другим концом в другой канавке в нижней части конуса (1).
В известном виитовом прессе в период разгона подвижных частей при переменном радиусе маховика при несоблюдении необходимых зависимосфей между параметрами
пресса и привода крутящий момент на валу электродвигателя будет переменным, т. е. электродвигатель будет нагружен моментом, отличным от номинального, и поэтому разгон электродвигателя будет производиться не в оптимальном режиме.
С целью устранения отмеченных недостатков и повышения КПД привода при разгоне ползуна вниз в винтовом прессе, содержащем станину, в направляющих которой установлен ползун, имеющий привод от винтового механизма, состоящего из гайки, установленной в поперечные станины, и винта, на верхнем конце которого установлен маховик и усеченный конус, иа боковой поверхности которого выполнены две повернутые одна относительно другой на угол 180° спиралцные .винтовые канавк 1, которые связаны с. гибким звеном, один конец которого жестко закреплен в одной из канавок в верхней части конуса намотан на эту канавку по всей ее длине, охватывает связанный с электродвигателем ролик и жестко закреплен другим, концом в другой канавке в нижней части конуса, усеченный конус выполнен с криволинейной образующей, причем соотношение между радиусом и высотой конуса определено следующей зависимостью.
R
max
S А (-1),
гпр Д - RVh.
- постоян1ДС rt -и IT и DS
b Мдн Rnax. .
ный параметр пресса и привода
Зпр приведенный момент инерции подвижных частей; Мдц-номинальный момент электродвигателя;
о/дн -угловая номинальная скорость вращения вала электродвигателя RP -радиус ролика на валу электродвигателя;
R g -максимальный радиус конуса; h - шаг навивки гибкого звена; R - радиус конуса; S - высота конуса.
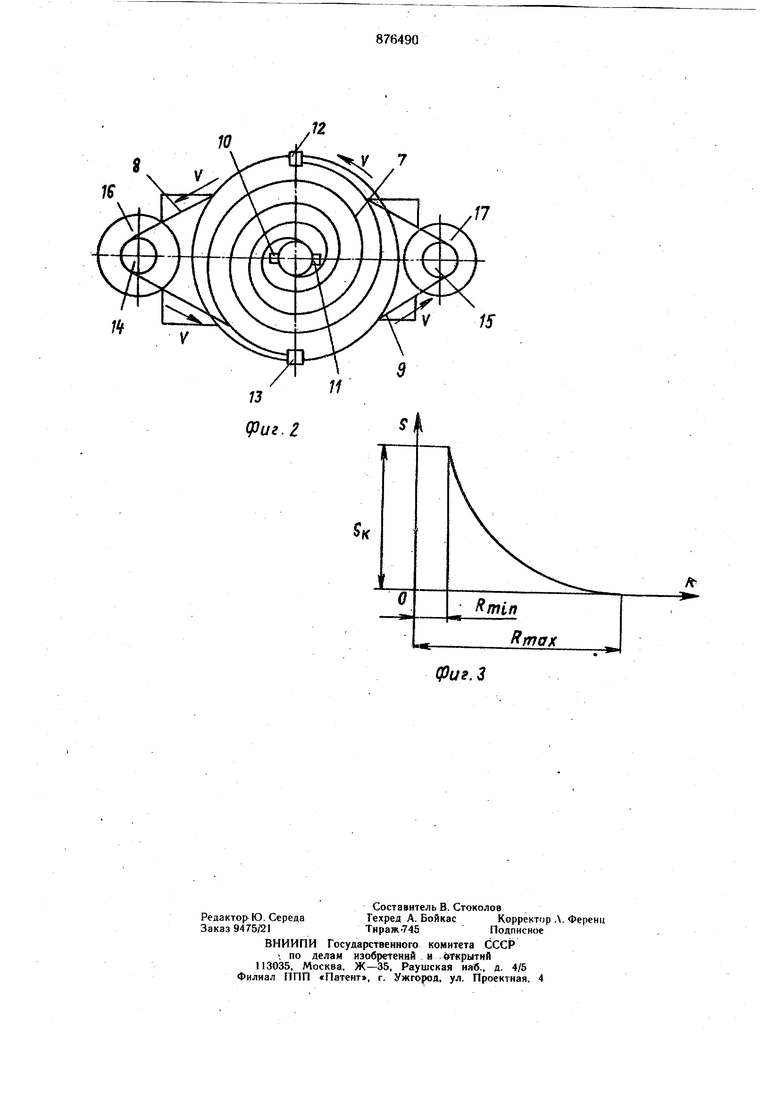
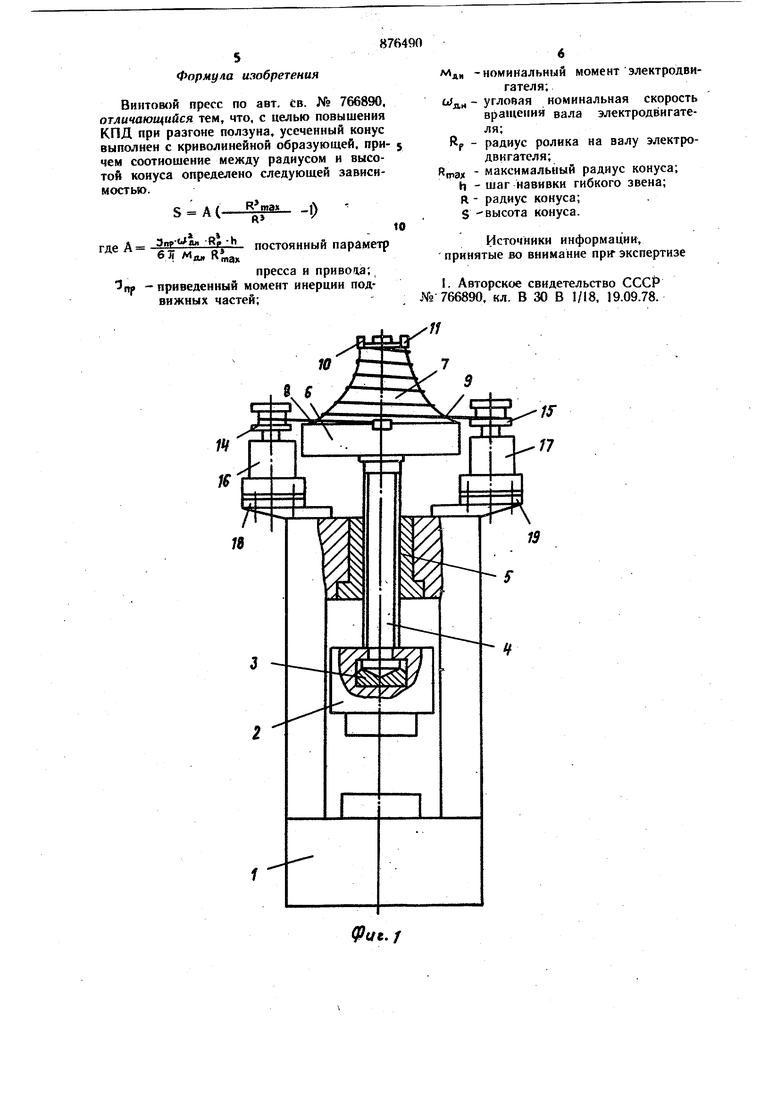
На фиг. 1 изображен пресс, общий вид; на фиг. 2 - то же, вид сверху; на фиг. 3- график зависимости R f(S) для усеченного конуса.
Винтовой пресс содержит станину 1, в направляющих которой установлен ползун 2, соединенный с помощью подпятника 3 с винтом 4, свинчивающимся с гайкой 5, установленной в поперечине станины 1. На верхнем конце винта 4 установлен маховик 6 и усеченный конус 7. На боковой поверхнести конуса 7 выполнены двухзаходнуе спиральные винтовые канавки с щагом равным щагу винта. При этом канавки расположены попарно параллельно и повернуты одна относительно другой на угол 180°.
В канавках расположены гибкие звенья 8 и 9, например канаты (клиновые ремни, цепи и т. п.). Концы канатов 8 и 9 закреплены посредством планок 10 и 11 в верхней части конуса 7, а планок 12 и 13 в нижней части конуса 7. Канаты 8 и 9, сбегая с конуса 7, охватывают соответственно ролики 14 и 15, установленные жестко на валах соответственно электродвигателей 16 и 17, смонтированных на кронщтейнах 18 и 19.
Винтовой пресс работает следующим образом.
Перед включением пресса ползун 2 находится в крайнем верхнем положении. При включении электродвигателей 16 и 17 ролики 14 и 15 начинают вращаться, и в результате сцепления с ними канатов 8 и 9 происходит передача крутящего момента на конус 7 и далее через маховик 6 на винт 4. Сочлененная с винтом гайка 5 обеспечивает поступательное перемещение винта 4 и ползуна 2.
В начальной фазе разгона подвижных частей радиус схвата канатами конуса 7 равен его максимальной величине Rma,
Конус 7, маховик 6 и винт 4 разгоняются до угловой скорости
erf (J
дн
где иУдц угловая Номинальная, скорость вращения валов электродвигателей 16 и 17; RP - радиус роликов 14 и 15; Rmai максимальный радиус конуса 7
Пос-чедующий разгон подвижных частей при дальнейщем вращений роликов 14 и 15 происходит за счет сматывания и наматывания канатов 8 и 9 с противоположно установленных канавок.
С уменьшением радиуса конуса скорость вращения конуса 7 увеличивается и происходит накопление кинетической энергии подвижными частями пресса за счет отдачи электродвигателями работы в течение всего периода разгона маховика. При этом электродвигатели работают практически с посто.янным числом оборотов, равным номинальной скорости вращенияtJ электродвигателя, и с постоянным моментом на валу электродвигателя, равным номинальному моментуМщ,. В конце хода вниз ползун с инструментомдостигают заготовки и совершается полезная работа деформирования.
Подъем подвижных частей в исходное положение после хода деформирования осуществляется путем реверсирования электродвигателей 16 и 17. В конце хода вверх электродвигатели отключаются.
Выполнение образующей конуса указанной формы позволит обеспечить работу электродвигателя большую часть времени хода вниз в номинальном режиме с номинальным значением ЛЛдн и, тем самым , избежать перегрузки электродвигателя. С другой сто- РОНЫ, исключается работа с недогрузками электродвигателя по крутящему моменту, которая также ухудшает показатели работы привода, поскольку при этом снижается его КПД и cos (, увеличивается продолжительность разгона подвижных частей до заданного значения кинетической энергии. При этом оптимальный режим разгона привода повышает работоспособность и других его элементов, например канатов, в связи с постоянством нагрузки на всем ходе разгона.
Шаг навивки канатов на конусе целесообразно делать при поступательно движущемся винте равным щагу винта. В случае неподвижной осевой установки винта, а следовательно и конуса, щаг навивки канатов на конусе следует делать меньще шага винта, чтобы уменьшить высоту конуса. Величина шага навивки канатов может быть и переменной.
ЭффекЛ1Вность использования предлагаемого винтового пресса обеспечивается оптимизацией режима разгона его привода. Формула изобретения Винтовой пресс по авт. св. 766890, отличающийся тем, что, с целью повышения КПД при разгоне ползуна, усеченный конус выполнен с криволинейной образующей, прнчем соотношение между радиусом и высотой конуса определено следующей зависимостью. S А( Rp-h ПОСТОЯННЫЙ параметр 65F Мщ, . пресса и привода; Inp - приведенный момент инерции подвижных частей; Мд -номинальный момент электродвигателя;Ыд - угловая номинальная скорость вращения вала электродвигателя;RP - радиус ролика на валу электродвигателя;шах максимальный радиус конуса; h - шаг навивки гибкого звена; R- радиус конуса; S -высота конуса. Источники информации, принятые во внимание при- экспертизе 1. Авторское свидетельство СССР 66890, кл. В 30 В 1/18, 19.09.78.
е/е./ Jf
Сриг.З 7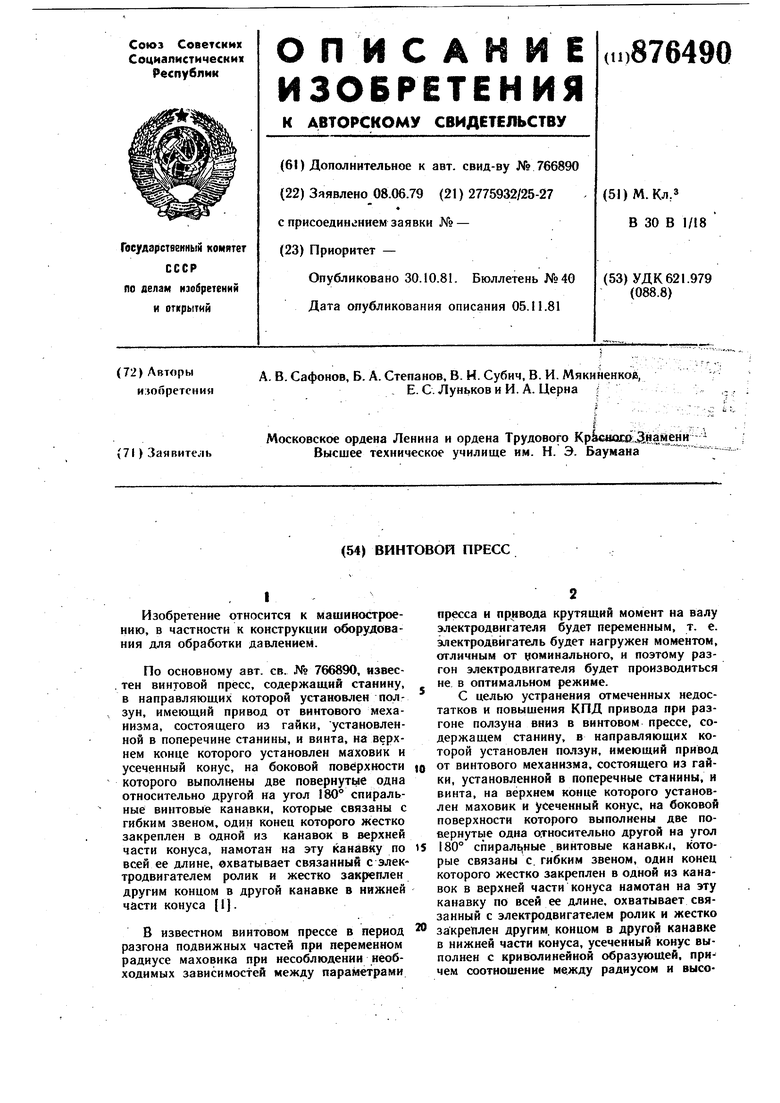
| название | год | авторы | номер документа |
|---|---|---|---|
| Винтовой пресс | 1980 |
|
SU870187A1 |
| Винтовой пресс | 1978 |
|
SU766891A1 |
| Винтовой пресс | 1978 |
|
SU766890A1 |
| Винтовой пресс | 1981 |
|
SU998130A1 |
| РЫЧАЖНО-ВИНТОВОЙ ПРЕСС | 2001 |
|
RU2192963C1 |
| Винтовой пресс | 1982 |
|
SU1097507A1 |
| ВИНТОВОЙ ПРЕСС | 1993 |
|
RU2063341C1 |
| ВИНТОВОЙ ПРЕСС С МУФТОВЫМ ПРИВОДОМ | 1999 |
|
RU2169077C2 |
| Привод кривошипного пресса | 1978 |
|
SU753677A1 |
| Винтовой пресс мамедбакова | 1976 |
|
SU672059A1 |