I
Изобретение относится к транспортным средствам и может быть использовано для перевозки людей и грузов.
Известно транспортное средство, содержащее раму с установленным на ней двигателем, механически соединенным с генератором и мотор-колеса, установленные на раме транспортного средства, каждое из которых состоит из электродвигателя, кинематически связанного с колесным движителем и электрически с упомянутым генератором I.
Недостатком данного транспортного средства является его недостаточная маневренность.
Цель изобретения - повышение маневренности транспортного средства.
Указанная цель достигается тем, что транспортное средство снабжено механизмами управления положением мотор колес в пространстве, каждое из которых состоит из корпуса, в котором размещено упомянутое мотор-колесо, установленного на раме с возможностью поворота относительно оси, параллельной продольной оси транспортного средства и относительно вертикальной оси, причем каждый ид упомянутых колесных движителей выполнен в виде полусферы.
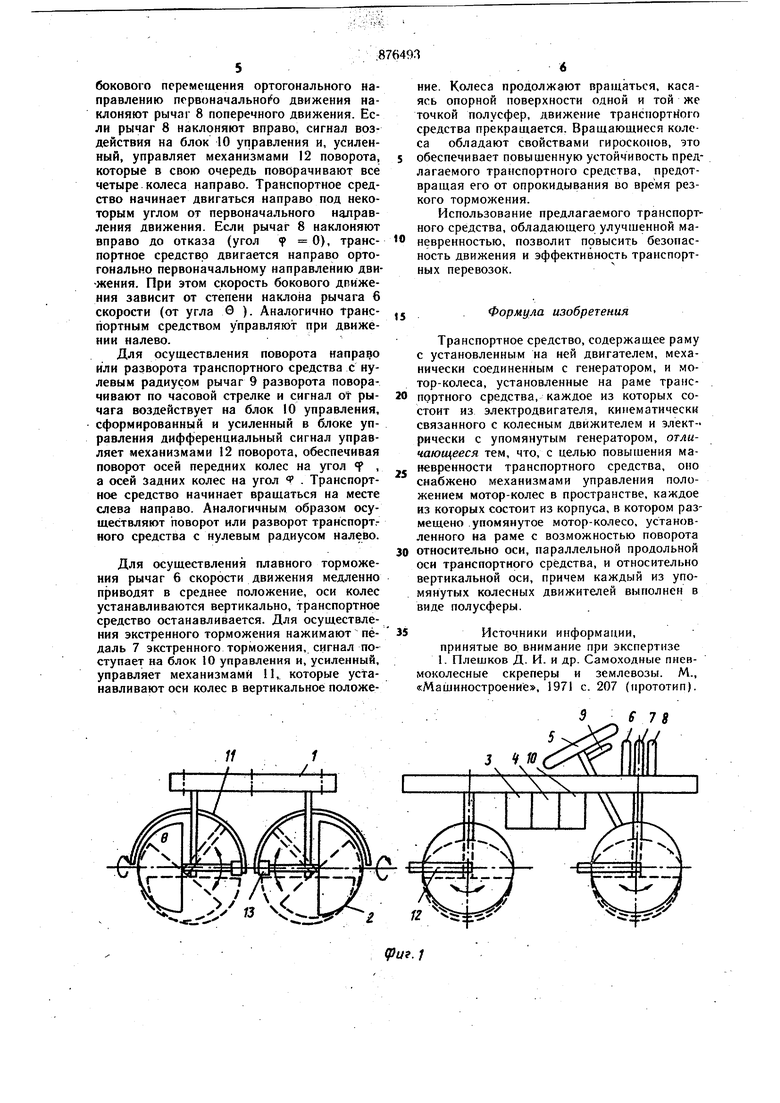
На фиг. 1 изображено транспортное средство, общий вид; на фиг. 2 - функциональная схема; на фиг. 3 - установка переднего левого колеса в системе координат xyz.
5 Транспортное средство имеет шасси I, полусферические колеса 2, двигатель 3, генератор 4, руль 5, рычаг 6 скорости движения, педаль 7 экстренного торможения, рычаг 8 поперечного движения, рычаг 9
,0 разворота, блок 10 управления механизмы 11 изменения скорости движения, механизмы 12 поворота; электромоторы 13.
Руль 5, рычаг 6 скорости движения и ледаль 7 экстренного торможения через
15 блок 10 управления подключены к механизмам 11 изменения скорости движения, рычаг 8 поперечного движения рычаг разворота 9 через блок 10 управления подключены к механизмам 12 поворота, механизмы И изменения скорости движения и поворота, 12
20 соединены непосредственно с осями полусферических колес 2. Двигатель 3 через генератор 4 соединен с электромоторами 13, установленными на осях колес 2.
Полусферические колеса 2 выполнены, например из полусферических резиновых ка.мер -и покрышек с протекторами по всей полусфере, во время движения колеса могут касаться опорной поверхности любой точкой полусферы.
Рычаг 6 скорости движения установлен, например слева от руля бив зависимости от степени его наклона вперед или назад посредством блокг1|, 10 управления и механизмов 11 изменения скорости движения обеспечивает передвижение транспортного средства с различной скоростью вперед или назад.
Рычаг 8 поперечного движения установлен, например справа от руля 5 и в зависимости от степени его наклона вправо или влево посредством блока 10управления и механизмов поворота 12 обеспечивает передвижение транспортного средства под различными углами вправо или влево, не меняя его ориентации в пространстве. Руль 5 установлен перед водителем н посредством блока 10 управления и механизмов 11 изменения скорости движения управляет поворотом транспортного средства, изменяя степень наклона правых и левых колес. Педаль 7 экстренного торможения находится на полу кабины транспортного средства, н-апример справе от руля в месте удобном для. нажатия на нее правой ногой воДителя. При ее нажатии блок 10 управления подает усиленный сигнал на механизмы 1 изменения скорости движения и.механизмы устанавливают оси колес в вертикальное положение.
Рычаг 9 разворота установлен на оси руля 5 и посредством блока 10 управления и механизмов 12 поворота обеспечивает поворот транспортного средства налево или направо в зависимости от поворота рычага против или по часовой стрелке с нулевым радиусом вращения центра транспортного средства.
Блок 10 управления является, например следящей системой., обеспечивающей преобразование и усиление сигнала для управления механизмами 11 и 12.
Механизмы 11 изменения скорости движения и поворота 12 являются, например гидравлические механизмы или электрические двигатели с редукторами, обеспечивающие изменение положения колес в пространстве.
Транспортное средство работает следующим образом.
Для рассмотрения вводится сферическая система координат, связанная с транспортным средством. Для определенности будем полагать, что начало координат совпадает с неподвижной (относительно транспортно.го средства) опорной точкой оси переднего левого колеса (по отношению к направлению движения транспортного средства).
Ось X совпадает с направлением движения, ось У совпадает с осью колеса, ось Z -
вертикальна. На фиг. 3 обозначено О - угол между вертикалью и осью колеса (широтный угол), «Р - угол между направлением движения и осью колеса (меридиональный угол), причем р 90° сеютветствует плоскости, ортогональной к продольной оси симметрии транспортного средства. Электромоторы 13, приводимь1е в движение генератором 4, обеспечивают вращение колес с постоянной скоростью. Механизмы 11 изменения скорости поворачивают оси в плоскости угла в . Механизмы 12 поворота поворачивают оси колес в плоскости угла «р.
Изменения скорости движения рассматриваемого транспортного устройства в отличие от известного осуществляется не за счет переключения передач (переключением, одной из нескольких шестерен), а за счет . синхронного поворота осей колес относительно вертикали (изменение угла Q ) механизмами 11. Когда средство состоит на месте, все оси колес ориентированы вверх, угол 0 180°. Колеса вращаются, но ввиду того, что они касаются опорной поверхности одной н той же точкой сфер, транспортное средство неподвижно.
5 При наклоне рычага 6 скорости вперед сигнал воздействует на блок 10 управления и усиленный подается на механизмы П изменения скорости движения, которые синхронно наклоняют оси {олес и, если колеса вращаются, транспортное средство начинает
0 двигаться вперед. От степени наклона рычага 6 скорости увеличивается скорость движения транспортного средства и достига бт максимальной при угле Э 90°, когда полусферические колеса качаются опорной
- поверхности диаметральной частью сферы. При изменении скорости движения транспортного средства, скорость вращения осей колес остается постоянной. При наклоне рычага 6 скорости назад or среднего положения угол 0 становится больше 180° и трансг
0 портное средство начинает двигаться назад. Для изменения направления движения транспортного средства направо, поворачивают руль 5 направо и посредством блока 10 управления и механизмов 11 изменения скорости движения оси левых колес транспортного средства наклоняются на больший угол от вертикали, а оси правых колес - на меньший угол от вертикали, скорость левых колес становится больше, чем правых и транспортное средство поворачивает иапра0 во. Для изменения направления движения транспортного средства налево, руль 5 поворачивают налево и управление происходит аналогично описанному. При, управлении рулем предлагаемое транспортное средство поворачивается с радиусом поворота как у
5 нзвестного.
Для осуществления движения транспортного средства в сторону под углом без изменения его ориентации в пространстве или
бокового перемещения ортогонального направлению первоначально1 о движения наклоняют рычаг 8 поперечного движения. Если рычаг 8 наклоняют вправо, сигнал воздействия на блок 10 управления и, усиленный, управляет механизмами 12 поворота, которые в свою очередь поворачивают все четыре колеса направо. Транспортное средство начинает двигаться направо под некоторым углом от первоначального направления движения. Если рычаг 8 наклоняют вправо до отказа (угол р 0), транспортное средство двигается направо ортогонально первоначальному направлению движения. При этом скорость бокового движения зависит от степени наклона рычага 6 скорости (от угла в ). Аналогично транспортным средством управляют при движении налево.
Для осуществления поворота направо или разворота транспортного средства с нулевым радиусом рычаг 9 разворота поворачивают по часовой стрелке и сигнал от рычага воздействует на блок 10 управления, сформированный и усиленный в блоке управления дифференциальный сигнал управляет механизмами 12 поворота, обеспечивая поворот осей передних колес на угол , а осей задних колес на угол 9 . Транспортное средство начинает вращаться на месте слева направо. Аналогичным образом осуществляют поворот или разворот транспорт,ного средства с нулевым радиусом налево.
Для осуществления плавного торможения рычаг 6 скорости движения медленно приводят в среднее положение, оси колес устанавливаются вертикально, транспортное средство останавливается. Для осуществления экстренного торможения нажимают педаль 7 экстренного торможения, сигнал поступает на блок 10 управления и, усиленный, управляет механизмами П, которые устанавливают оси колес в вертикальное положение. Колеса продолжают вращаться, касаясь опорной поверхности одной и той же точкой полусфер, движение транспортного средства прекращается. Вращающиеся колеса обладают свойствами гироскопов, это обеспечивает повышенную устойчивость предлагаемого транспортного средства, предотвращая его от опрокидывания во время резкого торможения.
Использование предлагаемого транспортного средства, обладающего улучшенной маневренностью, позволит првысить безопасность движения и эффективность транспортных перевозок.
Формула изобретения
Транспортное средство, содержащее раму с установленным на ней двигателем, механически соединенным с генератором, и мотор-колеса, установленные на раме транспортного средства, каждое из которых состоит из электродвигателя, кинематически связанного с колесным движителем и электрически с упомянутым генератором, отличающееся тем, что, с целью повышения маневренности транспортного средства, оно снабжено механизмами управления положением мотор-колес в пространстве, каждое из которых состоит из корпуса, в котором размещено упомянутое мотор-колесо, установленного на раме с возможностью поворота
0 относительно оси, параллельной продольной оси транспортного средства, и относительно вертикальной оси, причем каждый из упомянутых колесных движителей выполнен в виде полусферы.
5Источники информации,
принятые во. внимание при экспертизе 1. Плешков Д. И. и др. Самоходные пиевмоколесиые скреперы и землевозы. М., «Машиностроение, 1971 с. 207 (прототип). f 78
| название | год | авторы | номер документа |
|---|---|---|---|
| Транспортное средство Исина | 1985 |
|
SU1294646A1 |
| КОЛЁСНО-ГУСЕНИЧНОЕ ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ИНВАЛИДА | 2013 |
|
RU2542220C1 |
| Система управления транспортного средства | 1985 |
|
SU1311954A1 |
| ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ЛЮБОЙ МЕСТНОСТИ, УПРАВЛЯЕМОЕ ПОСРЕДСТВОМ ЗАНОСА | 2008 |
|
RU2499716C2 |
| Быстроходный двухосный колёсный вездеход на шинах сверхнизкого давления с комбинированной системой управления | 2017 |
|
RU2652936C1 |
| Движитель Н.Т. Краснова с узлом поворота коленвала, транспортное средство с этим движителем и способ его движения (варианты) | 2017 |
|
RU2657710C1 |
| СИСТЕМА УПРАВЛЕНИЯ СУДНОМ НА СЖАТОМ ПНЕВМОПОТОКЕ | 2019 |
|
RU2712351C1 |
| МАЛОГАБАРИТНЫЙ ГУСЕНИЧНЫЙ КАТЕР С ЭЛЕКТРОМЕХАНИЧЕСКОЙ ТРАНСМИССИЕЙ | 2023 |
|
RU2836745C1 |
| ТРАКТОР | 2009 |
|
RU2401759C2 |
| ВОДНЫЕ ЛЫЖИ (ВАРИАНТЫ) | 2018 |
|
RU2683119C1 |

