Изобретение относится к безрельсовым транспортным средствам, в частности, к широкому классу транспортных средств, имеющих колесный движитель, в том числе, с различным расположением колес относительно опорной поверхности.
Пояснения терминов, сокращения.
- Транспортное средство - {далее - ТС).
- В заявке рассматривается работа колесного движителя и движение ТС по опорной поверхности (далее - ОП), которую мы рассматриваем как твердую горизонтальную плоскость земли, асфальта. Хотя такое рассмотрение можно распространить на другие виды поверхности: криволинейную, наклонную, со случайными неровностями, водную, дисперсную и т.д.
Известен веломобиль (см. патент РФ №2299826, от 10.01.2006 г.), содержащий раму, переднее приводное и заднее поворотное колеса, мускульный цепной привод с педалями, руль, связанный с поворотным колесом, узел сиденья со спинкой, типовую тормозную систему и защитные элементы, при этом по бокам переднего колеса имеются дополнительные поддерживающие колеса, установленные своими полуосями на П-образном рычаге в жестко закрепленных на его концах стаканах с зажимными хомутами для фиксации размера колеи, который боковыми своими частями шарнирно закреплен на передней вилке рамы, а передней частью посредством вертикальной пружины - к передней части крыла рамы таким образом, что передняя часть рычага опирается на ограничители на торце вилки рамы, при этом боковые колеса имеют возможность своего перемещения вместе с рычагом вверх по дуге для обеспечения фиксированного зазора с поверхностью дороги при прямолинейном движении веломобиля. Указанные поддерживающие колеса (облегченные и меньшего диаметра) должны обеспечивать устойчивость веломобиля к опрокидыванию, особенно при прохождении поворотов, а также повышение комфортности и возможность пользования водителем с ограниченными возможностями. В аналоге, путем установки дополнительных поддерживающих колес в поднятое или опущенное положение, в веломобиле имеется возможность изменять опорную поперечную базу, а именно, изменять колейность ТС с одно- до трех-колейного (с фиксированной шириной колеи, неизменными продольной базой и клиренсом, со стандартным способом торможения).
Недостатки аналога.
Вместе с третьим основным поворотным колесом дополнительные поддерживающие колеса образуют неустойчивую и ненадежную трехточечную систему опоры на землю, особенно, при повороте веломобиля: при различных скоростях и радиусах поворота параметры системы и условия равновесия будут меняться, что может привести к потере равновесия веломобиля и аварии.
Дополнительные поддерживающие колеса используются в аналоге только вместе с одним (передним) колесом велосипеда, веломобиля. Другие конструкции (например, двухколейная) не рассматриваются.
Задача управления указанными поддерживающими колесами и задача торможения веломобиля решаются разными методами и, соответственно, разными узлами веломобиля, а не одним движителем, как в заявляемом изобретении. Это приводит к усложнению управлением веломобиля, к использованию большего ассортимента материалов и деталей, более сложной схеме, что увеличивает стоимость изделия.
Известен ряд технических решений - инвалидных колясок, имеющих общие конструктивные признаки с заявляемым изобретением.
На сайте: http://www.dobrota.ru/page/page63.html - представлены обзоры многих типов инвалидных колясок.
Ниже представлено описание базовой инвалидной коляски с вариантами исполнения.
Инвалидная коляска, содержит раму, элементы которой составляют основу кресла с сиденьем, спинкой, поручнями, с подлокотниками, элементами поддержки ног и/или с элементами амортизации для пользователя.
На раме закреплен колесный движитель, в виде пары одинаковых приводных колес, с возможностью вращения каждого колеса вокруг оси, совпадающей с осью своего «колесного» вала и с возможностью преобразования вращательного движения этих колес в поступательное движение указанной инвалидной коляски или обратного преобразования при контакте указанных колес с ОП. В приводном движителе стандартной инвалидной коляски, оси ее указанных колесных валов закреплены на раме так, чтобы приводные колеса находились по бокам снаружи рамы, каждое в плоскости, близкой к вертикальной.
В аналогах ручной привод инвалидной коляски в движение, в большинстве случаев, осуществляется с использованием пары дополнительных ободов меньшего радиуса, чем основные, жестко закрепленных на колесах, соосно с их основными ободами. Пользователь кистями рук двигает верхнюю часть дополнительного обода колес, набирая обороты, и этим обеспечивает ход коляски в необходимом направлении. Кроме указанного, имеются и другие конструкции и способы ручного или ножного мускульного привода коляски в движение (рычажный, цепной или с зубчатой передачей на колеса и т.п.).
Кроме того, обычно инвалидная коляска имеет на раме пару одинаковых поворотных колес спереди по бокам коляски, с возможностью их вращения, а также смещения-поворота их осей вращения в плоскости, параллельной ОП. При этом валы поворота оси поворотных колес обычно закреплены на раме так, чтобы линия оси каждого вала поворота соответствующего поворотного колеса была одинаково удалена от центра этого колеса.
Также в конструкции инвалидной коляски обычно предусмотрено наличие элементов узла ее торможения, который может приводиться в действие как самим пользователем, так и персоналом, помогающим инвалиду передвигаться на коляске и останавливаться.
Кроме того, в некоторых инвалидных колясках предусмотрено использование узла моторного привода коляски в движение в дополнение к мускульному или только моторного.
При этом конструкция собственно рамы и элементов инвалидной коляски, в том числе, размещения движителя - приводных колес, а также поворотных колес, близка к симметричной относительно продольной плоскости коляски, перпендикулярной ОП.
Также в ряде конструкций имеется возможность присоединения-закрепления к раме коляски и отсоединения от нее узла переднего управляемого привода, так называемой велоприставки (например, с ручным, ножным и/или моторным приводом), см., например, http://www.freeway.by/o-bezbarernoy-srede/katalog-izdeliy-i-uslug/invalidnye-kolyaski.php или http://etracab.ru/forum/viewtopic.php?id=899.
Особенности конструкции конкретной велоприставки и ее крепления к инвалидной коляске соответствуют конструкции этой коляски и потребностям ее пользователя.
Обычным в конструкции велоприставки с ручным приводом является такой ее состав. Основой велоприставки является поворотная стойка-вал, в верхней части которой жестко закреплен ручной привод в виде коленчатой конструкции рычагов для вращения их руками пользователя. Нижняя часть вала обычно жестко соединена с вилкой, в которой установлено ведущее и одновременно поворотное колесо, с возможностью вращения вокруг своей оси для привода конструкции (приставки и коляски) в движение. Указанный вал установлен и связан с элементами крепления велоприставки к инвалидной коляске (через специальную обойму вала или через посадочные подшипники) с возможностью поворота вала и своего колеса для изменения направления движения коляски. Передача усилия вращения коленчатых рычагов на привод колеса в движение осуществляется обычно с помощью звездочки и цепной передачи на звездочку и ступицу колеса велоприставки. Имеются элементы крепления велоприставки к инвалидной коляске, на которой должны быть предусмотрены ответные элементы крепления.
Велоприставка скрепляется с инвалидной коляской в жесткую конструкцию с возможностью отсоединения. Обычно имеется от 2-х до 5-ти мест/точек соединения приставки с коляской. При этом в закрепленном состоянии вал велоприставки наклонен верхней частью к пользователю инвалидной коляски и отодвинут от коляски, для обеспечения комфортного размещения пользователя в конструкции приставка-коляска и управления ею. При этом для эффективного использования приводного-поворотного колеса велоприставки, в момент ее присоединения к коляске и закрепления, переднюю часть инвалидной коляски поднимают так, чтобы передние поворотные колеса коляски не мешали движению.
Кроме того, практически всегда в состав велоприставки входит узел ручного торможения колеса приставки, возможны другие конструкционные опции: переключатель скоростей, световые сигналы и т.д.
Так как в данной заявке, в частности, как одно из ТС, рассматривается инвалидная коляска с новым движителем, то признаки указанной коляски, относящиеся к велоприставке, такие как элементы крепления инвалидной коляски к велоприставке, считаются известными и не патентуются.
Из вышеуказанных аналогов более близкими к рассматриваемой инвалидной коляске являются активные инвалидные коляски и спортивные инвалидные коляски.
Активные коляски. За счет гибкой системы регулировок (количество которых доходит до 40) активную коляску можно настроить с учетом индивидуальных особенностей конкретного человека: роста, веса, конституции тела, ограничения двигательной функции. Активные коляски предназначены для людей с инвалидностью, которые ведут активный образ жизни, много и часто передвигаются, хотят иметь максимум мобильности и маневренности.
Спортивные коляски. Спортивные коляски предназначены для занятия профессиональным спортом, в том числе гонками, и танцами. Подобные коляски изготавливаются на заказ с учетом всех особенностей планируемой эксплуатации. При этом используются особо прочные материалы, способные выдержать экстремальные спортивные нагрузки.
Спортивные инвалидные коляски весят намного меньше стандартных базовых колясок (8-14,5 кг). Подобная легкость достигается за счет рамы из особых легких сплавов, уменьшенного диаметра передних колес, специально смоделированной спинки и минимальных подлокотников (см., например, http://www.supporting.su/otzyvy/kakie_byvayut_invalidnye_kolvaski).
Спортивная коляска имеет те же элементы, что и другие коляски: раму в виде кресла с соответствующими аксессуарами, приводной движитель в виде пары приводных колес, пару поворотных колес, возможную систему торможения.
Дополнительной особенностью спортивной коляски, по сравнению с рассмотренными выше аналогами, при тех же остальных параметрах, является то, что в приводном движителе спортивной инвалидной коляски, оси указанных колесных валов, для повышения устойчивости, наклонены относительно продольной плоскости симметрии коляски так, что приводные колеса наклонены верхней частью друг к другу и к этой плоскости, при этом оставаясь размещенными снаружи по бокам коляски. Здесь, как и в других аналогах, ручной привод коляски в движение осуществляется с использованием пары дополнительных ободов меньшего радиуса, чем основные обода, жестко закрепленных на приводных колесах, соосно с их основными ободами.
Главным недостатком известных инвалидных колясок, в том числе и спортивной коляски, по сравнению с коляской с новым патентуемым движителем является тот факт, что известная коляска имеет неизменную 2х колейную (4х колесную) схему или также неизменную 3х колейную (3х колесную) схему, изначально заложенную в конструкцию коляски или полученную при присоединении велоприставки. Таким образом, у известных инвалидных колясок нет возможности мобильного изменения схемы колейности на ходу, что не позволяет активному пользователю использовать возможности маневрирования в условиях стесненности, изменения скорости и торможения косым следом по сравнению, например, с коляской с новым патентуемым движителем, в которой указанные изменения режима движения можно осуществить единственной рукояткой управления поворотом коленвала.
Особенно этот недостаток проявляется при использовании спортивной инвалидной коляски вместе с велоприставкой. Основная задача пользователя спортивной инвалидной велоколяски как раз и заключается в увеличении скорости, маневренности и подвижности коляски в процессе движения. В этом случае, невозможность (для известной коляски) мобильного переключения колейности с трех колейной устойчивой схемы на практически одноколейную линейную схему в процессе скоростного движения коляски, и обратно, является серьезным недостатком.
Известен шагающий движитель (см. патент РФ №2513348, от 04.03.2013 г.), принятый за прототип, содержащий два одинаковых механических тракта, каждый из которых выполнен в виде пары одинаковых дисков, расположенных на концах одной неподвижной оси, между дисками на осях установлены опоры. При этом неподвижные оси трактов соединены муфтами с коленчатой неподвижной осью, на которой установлен дополнительный диск с коленчатыми осями, соединенными муфтами с осями опор. При этом каждая пара концевых дисков в движителе выполняет роль одного целого колеса, контактирующего с ОП (с землей) при его движении. Также движитель содержит рычаг управления поворотом опор относительно земли на угол 90°. В одном положении рычага опоры на дисках упираются в землю, а в другом положении - размещены без контакта с землей, вдоль нее.
На самом деле, когда опоры упираются в землю, ход колеса движителя напоминает ход зубчатого колеса по земле с опорой на зубья, а когда опоры параллельны земле, то движитель превращается в обычный колесный.
Недостатки прототипа.
В конструкции движителя прототипа не предусмотрена возможность изменения ширины поперечной базы движителя и колейности при взаимодействии колес с ОП, по сравнению с заявляемой конструкцией. Тем более не идет речи о торможении ТС путем изменения расположения колес, как это предложено в заявляемой конструкции. Таким образом, при внешней схожести некоторых элементов конструкции и переключения режимов, сравниваемые движители решают различные задачи и используют при этом различающиеся способы их осуществления.
Пояснения терминов (продолжение)
к техническому решению описанному ниже.
- Коленчатый вал {далее пишем - коленвал).
- Когда пишем о материальном компоненте конструкции коленвала и составляющих его элементов, то пользуемся термином «вал», а когда пишем о повороте, вращательном движении этих материальных элементов (валов или всего коленвала) вокруг оси или о геометрических понятиях, то пользуемся термином «ось». При этом в некоторых случаях понятие «вал» может совпадать по смыслу с понятием «ось».
- Под шасси ТС здесь подразумеваем раму, несущий кузов или другую несущую основу конструкции ТС.
- Условно можно считать, что геометрический центр колеса ТС - это центр той окружности колеса, которая взаимодействует с ОП, он близок к центру окружности колеса наибольшего радиуса и расположен на оси его вращения.
Раскрытие изобретения.
Достигается следующий технический результат.
Конструкция заявляемого движителя позволяет пользователю простым движением рукоятки управления поворотом коленвала поворачивать указанный коленвал (вместе с симметрично взаимно наклоненными колесными валами и, соответствующим образом, симметрично взаимно наклоненными колесами) на заданный угол, фиксировать их под этим углом к начальному положению коленвала - к перпендикуляру, отложенному вверх от ОП.
Таким образом, обеспечиваются различное взаимное расположение областей контакта (следа) указанных колес движителя, а именно: на разных заданных расстояниях друг от друга, и различная (симметричная) ориентация указанного следа колес относительно направления движения ТС.
В результате, заданное угловое положение коленвала движителя позволяет обеспечить заданные режимы движения и/или торможения ТС.
В частности, при фиксации нулевого углового положения коленвала (когда «луч коленвала» совпадает с «начальным лучом» - перпендикуляром к ОП, направленным вверх) осуществляется режим максимального расстояния между следами колес, так называемый режим с максимальной поперечной опорной базой ТС.
Такая фиксация обеспечивает возможность сколь угодно долго использовать устойчивую двухколейную схему движителя ТС как на стоянке, так и в движении при любой скорости. В этом положении коленвала, при некоторой неизменной заданной геометрии колес движителя ТС, устойчивость ТС зависит от расположения и высоты оси поворота коленвала над ОП, при этом устойчивость ТС будет тем больше, чем ниже находится ось поворота коленвала. Одновременно в той же зависимости понижается положение центра тяжести ТС.
При этом пользователю нет необходимости постоянно поддерживать равновесие, чтобы набрать ход, легче использовать ТС людям с физическими недостатками, старшего возраста, детям. Уменьшается физическая нагрузка на организм пользователя. Указанный режим работы движителя ТС удобно использовать также для стоянки и начала движения ТС.
При фиксации другого углового положения коленвала (когда «луч коленвала» противоположно направлен - вниз (на 180°) относительно «начального луча») осуществляется режим минимального расстояния между следами колес, вплоть до возможного их взаимного касания, так называемый режим с узкой поперечной опорной базой ТС.
Такая фиксация обеспечивает возможность сколь угодно долго использовать практически одноколейную схему движителя ТС, как на стоянке, так и в движении при любой скорости. Преимущество узкой поперечной базы в маневренности и послушности ТС в движении при управлении пользователем. А также в возможности задать ТС более высокую скорость движения при той же или меньшей затрачиваемой энергии, мощности. При этом, в отличие от предыдущего случая, центр тяжести ТС может быть соответственно поднят.
Также конструкция заявляемого движителя позволяет, движением той же рукоятки управления поворотом коленвала, переключать режим работы движителя ТС с одного из вышеуказанных режимов качения ТС в режим торможения ТС так называемым «косым следом колес» и обратно. При этом выбор пользователем положения или, скажем по другому, момента фиксации коленвала под заданным углом поворота к шасси ТС позволяет задавать фиксированную ширину поперечной (в пределах диапазона от максимальной до минимальной ширины) и продольной базы ТС, величину и направление угла наклона следа колес к направлению движения ТС (это определяет усилие и особенности торможения ТС при регулировании рукояткой плавно или дискретно), а также соответствующие клиренс, высоту центра тяжести и длину продольной опорной колесной базы ТС.
Указанный движитель можно применять в ТС разного вида и конструктивного исполнения, заменив в ТС на такой движитель индивидуальное колесо, колесную пару или комплект колес, установленных на одной оси.
Такой движитель можно установить на: роликовые коньки, самокат, велосипед, веломобиль, инвалидную коляску, мопед, мотороллер, мотоцикл, квадроцикл, прицеп. Движитель может быть в составе ТС вместе с гусеничным, лыжным или вездеходным движителем, или в составе опорного шасси самолета.
Привод в движение движителя и/или ТС с ним может осуществляться с использованием мускульного привода, мотор-колесом с ДВС, с электродвигателем или с пневмодвигателем, а также аэровоздушным (с пропеллером), реактивным или турбовинтовым двигателем.
Конструкция патентуемого движителя позволяет несложным движением рукоятки управления поворотом коленвала изменять такие характеристики опорной схемы движителя и ТС, как колейность колесной базы, поперечный и продольный размеры указанной базы, геометрию центра тяжести и опорную площадь ТС.А также управлять процессом регулируемого торможения «косым следом колес» с необходимым усилием, используя единственную рукоятку управления поворотом коленвала.
Эту особенность ТС с патентуемым движителем можно использовать в конструкциях практически любого колесного ТС, из ряда указанных ТС, значительно проще, надежнее и многофункциональнее других известных конструкций того же назначения.
В итоге значительно упрощается процесс изготовления, использования и управления ТС, соответственно снижаются затраты на материалы, конструирование и производство ТС по сравнению с другими конструкциями аналогичного назначения.
Указанный технический результат достигается в движителе ТС, содержащем
коленвал, состоящий из, жестко скрепленных или выполненных как одно целое, участков, из которых, по меньшей мере, один участок является средним валом/осью, а два участка являются парой валов/осей для установки колес движителя, то есть «колесных» валов/осей,
также в составе коленвала возможно наличие двух участков, которые являются парой концевых валов с одной общей осью, параллельной оси среднего вала, причем указанные оси коленвала лежат в одной плоскости - в плоскости коленвала,
при этом указанный коленвал данного движителя закреплен на шасси ТС с возможностью поворота плоскости коленвала вокруг оси его среднего вала и/или вокруг общей оси концевых валов (назовем эту ось «осью поворота коленвала») на заданный угол поворота и фиксации его углового положения относительно шасси ТС, путем использования элементов управления поворотом коленвала,
на каждом из парных колесных валов установлено/закреплено по одинаковому колесу движителя с возможностью вращения этого колеса вокруг оси, совпадающей с осью своего колесного вала, и с возможностью преобразования вращательного движения колеса в поступательное движение движителя или обратного преобразования при контакте колеса с ОП,
при этом ось поворота коленвала и плоскость коленвала перпендикулярны плоскости, которая совпадает с направлением движения движителя ТС и перпендикулярна ОП,
отличающимся тем, что в плоскости коленвала парные колесные валы/оси размещены под углом друг к другу симметрично относительно перпендикуляра к оси поворота коленвала, опущенного на середину этой оси,
при этом, благодаря взаимному наклону своих колесных осей, колеса также наклонены зеркально симметрично одно к другому под заданным углом с локальным сближением края колес, и с уменьшенным расстоянием в этом месте между ними, вплоть до возможного контакта, так, что диаметры колес в плоскости коленвала образуют стороны воображаемой «буквы А», а отрезок прямой, соединяющей центры колес, образует перекладину указанной «буквы А», также расположенную в плоскости коленвала,
при этом ось поворота коленвала параллельна отрезку прямой, соединяющему центры колес движителя,
также указанная ось может совпадать с прямой, проходящей через центры колес движителя, находиться ближе, чем эта прямая, к точке/зоне локального сближения колес движителя или дальше от нее,
а элементы управления указанным поворотом коленвала могут быть скомпонованы в узел управления поворотом коленвала.
В частности, в движителе имеется возможность поворота коленвала вокруг оси его поворота на угол до ±360° и более относительно шасси ТС.
В частности, в движителе одно колесо или каждое из пары колес движителя выполнено в виде мотор-колеса с двигателем внутреннего сгорания.
В частности, в движителе одно колесо или каждое из пары колес движителя выполнено в виде мотор-колеса с электродвигателем.
В частности, в движителе одно колесо или каждое из пары колес движителя выполнено в виде мотор-колеса с пневмодвигателем.
В частности, в движителе элементом управления поворотом коленвала является рукоятка или ручка управления поворотом коленвала, путем передачи усилия пользователя на поворот коленвала, размещенная на шасси ТС преимущественно в месте, удобном для регулирования рукой пользователя.
В частности, в движителе элементом управления поворотом коленвала является механизм передачи механического момента поворота рукоятки на поворот коленвала вокруг оси поворота коленвала.
В частности, в движителе элементом управления поворотом коленвала является обгонный, храповой и/или затяжной, механизм с возможным переключателем направления и/или усилия поворота коленвала от механизма передачи момента поворота указанной рукоятки.
Также указанный выше технический результат достигается в ТС, содержащим
шасси, на котором или на элементе которого закреплены: по меньшей мере один колесный узел, который содержит два колеса, в качестве движителя ТС, с осями их вращения, находящимися в плоскости, перпендикулярной плоскости, которая совпадает с направлением движения указанного колесного узла ТС и перпендикулярна ОП,
при этом с возможностью постоянного закрепления указанного колесного узла или его поворота вдоль ОП для изменения направления движения ТС,
при этом в конструкции ТС возможно наличие:
узла привода ТС в движение, мускульного и/или моторного,
узла управления поворотом ТС,
по меньшей мере, одного узла сиденья пользователя(ей),
и/или узла торможения ТС,
в составе ТС возможны также кабина или салон, элементы защиты от окружающей среды и/или кузов,
отличающимся тем, что,
по меньшей мере, один указанный колесный узел выполнен в виде патентуемого выше (см. п. 1 формулы) движителя ТС с элементами управления поворотом коленвала движителя, которые возможно скомпонованы в узел того же названия,
при этом в составе указанных элементов или указанного узла управления поворотом коленвала возможно наличие элементов управления: рукоятки, привода и/или механизма управления, обеспечивающих соответствующий поворот, фиксацию или стопорение, в возможном заданном режиме, углового положения коленвала движителя относительно шасси или элемента шасси ТС.
В частности, моторный привод ТС в движение может быть выполнен в виде двигателя внутреннего сгорания, электродвигателя или пневмодвигателя или комбинированным с ними.
В частности, моторный привод ТС в движение может быть выполнен в виде аэровоздушного, реактивного или турбовинтового двигателя или комбинированным с ними.
В частности, ТС выполнено в виде роликовых коньков, самоката, велосипеда или веломобиля.
В частности, ТС выполнено в виде инвалидной коляски.
В частности, ТС выполнено в виде мопеда, мотороллера, мотоцикла или квадроцикла.
В частности, ТС имеет в составе гусеничный, лыжный или вездеходный движитель.
В частности, ТС является самолетом, опорное шасси которого содержит патентуемый движитель.
В частности, ТС выполнено в виде прицепа.
Пояснение терминов (продолжение),
пояснение (описание) работы движителя и осуществления движения ТС.
Раздел «описание работы устройства» перенесен в данный раздел для пояснения терминов и большей ясности изложения материала.
- Совместив плоскость рисунка (см. например, фиг. 2 и 4) с продольной плоскостью ТС, получим вид сбоку на ТС, при этом плоскость коленвала 1, перпендикулярная продольной плоскости ТС, проецируется в прямую линию, плоскость шасси 4 в «условно горизонтальную» линию, а ось 2 поворота коленвала 1 (это может быть ось 2.1 среднего вала или общая ось 2.2 пары концевых валов) в точку пересечения проекции плоскости коленвала 1 с проекцией плоскости шасси 4. Поворачивая коленвал 1 вокруг оси 2 поворота коленвала 1 (на фиг.2 и 4 такой осью является ось 2.1 среднего вала, а элементом шасси 4 является наружное кольцо 4.1 подшипника), и соответственно, поворачивая оси колес 5.1, 5.2, наклоненные друг другу в плоскости коленвала 1, мы видим поворот прямой (т.е. проекции плоскости коленвала 1) вокруг точки - середины оси 2.1 поворота коленвала 1 (обозначим эту точку буквами - Ов, а воображаемый геометрический луч совпадающий с прямой проекции плоскости коленвала на рисунок, начинающийся в точке Ов и соединяющий ее с точкой/зоной сближения края колес, назовем «луч коленвала»).
Зададим вектор направления движения ТС по горизонтали относительно ОП. Примем воображаемый вертикальный луч вверх от точки Ов за начало отсчета углов поворота коленвала 1 вокруг Ов (назовем этот луч «начальным лучом»).
- В результате поворота коленвала 1, на заданный угол поворота и совмещенного с ним «луча коленвала», а также после фиксирования положения коленвала 1 относительно шасси 4, получаем фиксированные значения наклона коленвала 1 к ОП, и соответственно, фиксированное положение следа каждого колеса 5.1, 5.2 на указанной ОП.
- Хотя обычно под «следом колеса» понимаем площадку в месте контакта колеса с ОП, в нашем рассмотрении условно следом колеса 5.1, 5.2 на ОП будем считать отрезок прямой на ОП, расположенный вдоль указанной площадки по ее центру.
- Если след колеса 5.1, 5.2 находится под углом к траектории движения ТС, то такой контакт колеса с ОП и расположение следа назовем «косым следом». При этом на оба колеса 5.1, 5.2 ТС в зоне их контакта с ОП будут действовать не только силы, направленные вдоль траектории, но также силы, смещающие колеса 5.1, 5.2 перпендикулярно к ней. При этом будем считать, что поперечная составляющая суммы сил, действующих на оба колеса равна нулю, а продольная составляющая создает эффект торможения движению ТС в заданном направлении и эта сила торможения тем больше, чем сильнее наклон следа колес 5.1, 5.2 к траектории движения ТС.
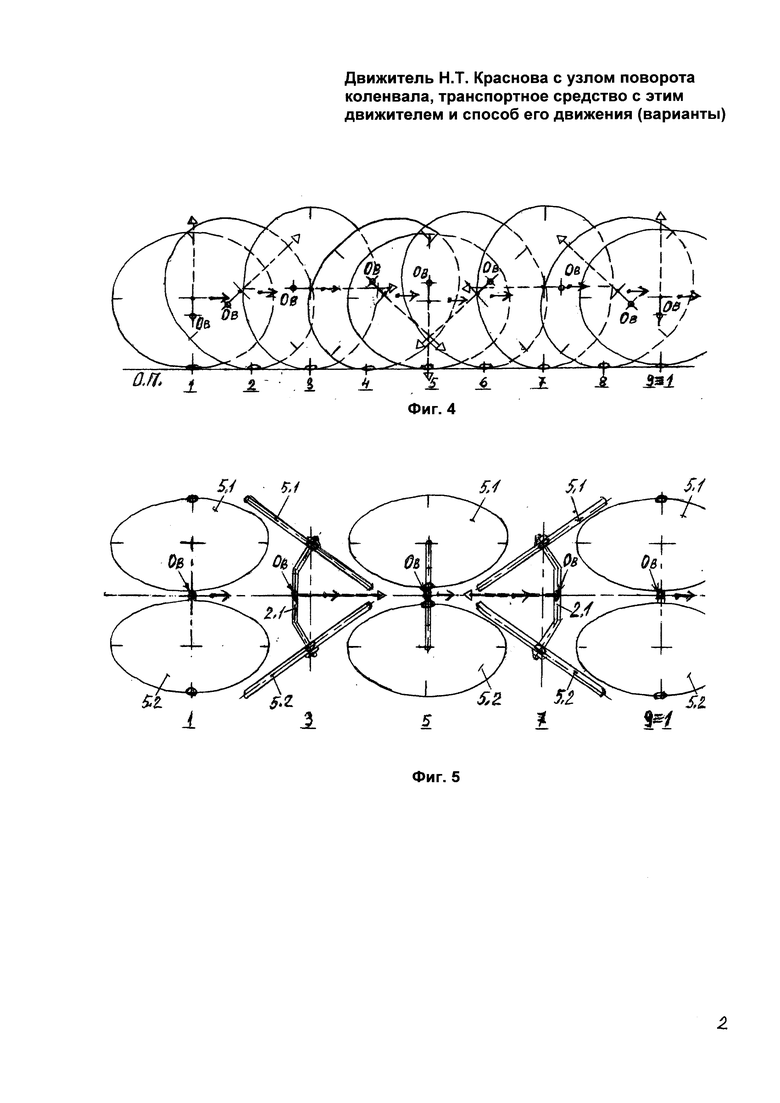
- Так как результат поворота коленвала 1 зависит только от его угла поворота (углового положения) относительно «начального луча», ниже определены характеристики соответствующих параметров взаимодействия колес 5.1, 5.2 движителя ТС в зависимости от значений указанного угла поворота коленвала 1. Эти характеристики при разных угловых положениях коленвала 1 иллюстрируются на фиг. 4 (вид сбоку на движитель) и на фиг. 5 (вид сверху на движитель)
Для определенности поворачиваем коленвал 1 и совмещенный с ним «луч коленвала», начиная от «начального луча», в направлении вектора заданного движения ТС по ОП. Указанное направление поворота коленвала 1 считаем положительным.
а) При угле поворота коленвала 1, равном 0°, вершина «буквы А» находится в самом верхнем положении, а отрезки следа каждого колеса 5.1, 5.2 разнесены на максимальное расстояние и расположены параллельно касательной к траектории движения ТС. Усилие торможения в следе колес на ОП отсутствует.
б) По мере увеличения угла поворота коленвала 1 в диапазоне от 0° до 90° расстояние между центрами следа колес 5.1, 5.2 соответственно уменьшается до половины своего максимального значения и, что важно, эти отрезки следа симметрично поворачиваются на некоторый угол относительно указанной траектории ТС. Если в этот момент (при угле поворота коленвала в пределах от 0° до 90°) указанные отрезки следа продлить до их пересечения, то получим клиновидную фигуру, с направлением вершины клина вперед, эту фигуру назовем - «плуг». Усилие торможения в следе колес на ОП при увеличении угла поворота коленвала 1 увеличивается.
в) При угле поворота коленвала 1, равном 90°, вершина «буквы А» направлена горизонтально в направлении движения ТС (при этом плоскость коленвала 1 параллельна ОП), расстояние между центрами следа колес 5.1, 5.2 примерно равно половине своего максимального значения. При этом «плуг» из указанных отрезков следа образует угол, направленный вперед и равный углу между плоскостями колес. Усилие торможения в следе колес на ОП максимальное.
г) По мере увеличения угла поворота коленвала 1 в диапазоне от 90° до 180° расстояние между центрами следа колес 5.1, 5.2 плавно уменьшается до своего минимального значения, при этом указанные отрезки следа симметрично поворачиваются, но уже обратно, относительно указанной траектории ТС, становясь параллельными отрезками. Усилие торможения в следе колес на ОП при увеличении угла поворота коленвала уменьшается.
д) При угле поворота коленвала 1, равном 180°, вершина «буквы А» направлена вертикально вниз, отрезки следа каждого колеса 5.1, 5.2 разнесены на минимальную ширину, вплоть до возможного взаимного контакта колес в этом месте, и расположены параллельно к траектории движения ТС. Усилие торможения в следе колес на ОП отсутствует.
е) По мере увеличения угла поворота коленвала 1 в диапазоне от 180° до 270° расстояние между центрами отрезков следа колес 5.1, 5.2 плавно увеличивается до половины своего максимального значения, а отрезки следа симметрично поворачиваются относительно указанной траектории ТС, подобно повороту следа в п. б) данного анализа. Если в этот момент указанные отрезки следа продлить до их пересечения, то получим клиновидную фигуру, с направлением вершины клина назад, эту фигуру назовем - «якорь». Усилие торможения в следе колес на ОП при увеличении угла поворота коленвала 1 увеличивается.
ж) При угле поворота коленвала 1, равном 270° вершина «буквы А» направлена горизонтально против направления движения ТС (при этом плоскость коленвала 1 параллельна ОП), расстояние между центрами отрезков следа колес 5.1, 5.2 примерно равно половине своего максимального значения. При этом «якорь» из указанных отрезков следа образует наибольший угол, направленный назад и равный углу между плоскостями колес. Усилие торможения в следе колес на ОП максимальное.
з) По мере увеличения угла поворота коленвала 1 в диапазоне от 270° до 360° (0°), расстояние между центрами отрезков следа колес 5.1, 5.2 плавно увеличивается до своего максимального значения, а указанные отрезки следа симметрично поворачиваются обратно относительно указанной траектории ТС, становясь параллельными отрезками. Усилие торможения в следе колес на ОП при увеличении угла поворота коленвала 1 уменьшается.
и) При достижении угла поворота коленвала 1, равного 360° (0°), положение коленвала 1 и взаимодействие колес 5.1, 5.2 с ОП, совпадает его с положением и взаимодействием колес при угле, равном 0° (см. п.а) данного анализа).
Также указанный выше технический результат достигается в способе движения ТС с патентуемым выше движителем, отличающемся тем, что
в процессе движения ТС, его остановки или стоянки поворачивают коленвал в выбранном направлении, вместе с воображаемым «лучом коленвала», вокруг оси поворота коленвала относительно «начального луча», то есть начального положения коленвала, считая положительным изменение угла поворота коленвала, совпадающее с направлением движения ТС, а также устанавливают и/или фиксируют его положение, путем поворота рукоятки управления положением коленвала движителя ТС и передачи усилия от рукоятки на поворот, стопорение или фиксирование положения коленвала в любой очередности действий так, чтобы угол поворота коленвала принимал заданное значение,
с возможностью повторно изменять угловое положение коленвала или обеспечивать выбранное угловое положение коленвала путем его фиксации или закрепления,
при этом, чтобы обеспечить движение движителя ТС по широкой двухколейной схеме, поворачивают коленвал движителя до совпадения «начального луча» и «луча коленвала», то есть, до нулевого угла, и фиксируют это угловое положение коленвала,
при этом, чтобы обеспечить движение движителя ТС по узкой двухколейной (практически одноколейной) схеме, поворачивают коленвал движителя до значения угла поворота: ±180° от положения «начального луча» и фиксируют это угловое положение коленвала,
при этом, чтобы обеспечить торможение ТС с использованием патентуемого движителя по схеме «плуга», поворачивают коленвал движителя, с отсчетом угла от «начального луча» при повороте в положительную сторону до выбранного угла поворота в диапазоне: от 0° до +180°, при этом максимальное усилие торможения наступит при угле поворота коленвала, равном: +90°, или при повороте в отрицательную сторону до выбранного угла поворота в диапазоне: от -180° до -360°, при этом максимальное усилие торможения наступит при угле поворота коленвала, равном: -270°,
при этом, чтобы обеспечить торможение ТС с использованием патентуемого движителя по схеме «якоря», поворачивают коленвал движителя, с отсчетом угла от «начального луча», при повороте в положительную сторону до выбранного угла поворота в диапазоне: от +180° до +360°, при этом максимальное усилие торможения наступит при угле поворота коленвала, равном: +270°, или при повороте в отрицательную сторону до выбранного угла поворота в диапазоне:
от 0° до -180°, при этом максимальное усилие торможения наступит при угле поворота коленвала, равном: -90°.
Изобретение поясняется примерами, которые проиллюстрированы фигурами 1-5. Пояснения к обозначениям представлены после перечисления фигур.
Фиг. 1. Показан вариант движителя ТС (вид сзади) при нулевом угловом положении коленвала. Пунктиром показаны «луч коленвала», совпадающий в данном положении с «начальным лучом», ось 2.1 среднего вала коленвала 1, общая ось 2.2 возможного размещения концевых валов, закрепленных в элементе 4.2 шасси ТС, а также границы плоской трапецевидной области возможного размещения оси 2.1 среднего вала, в том числе, верхняя 6.1 и нижняя 6.2 границы обозначенной трапеции.
Фиг. 2. Тот же движитель ТС, что и на фиг. 1 (вид сбоку). Сплошными линиями показаны контуры колес и ступицы, пунктиром - элементы коленвала и «луч коленвала». Остальные элементы фиг. 1 на фиг. 2 не показаны.
Фиг. 3. Веломобиль с патентуемым движителем в аксонометрической проекции.
Фиг. 4. На виде сбоку показаны последовательные положения проекции плоскости коленвала и соответствующих контуров колес движителя ТС на плоскость чертежа (сравни с фиг. 2) в процессе движения ТС, при соответствующем повороте коленвала движителя ТС и фиксации некоторых заданных угловых положений коленвала. А именно, в положениях: 1 угол поворота коленвала равен 0°, 2 - 45°, 3 - 90°, 4 - 135°, 5 - 180°, 6 - 225°, 7 - 270°, 8 - 315°, 9 совпадает с 1 - 360°/0°.
Фиг. 5. Вид сверху. То же, что и на фиг 4, в положениях: 1 угол поворота коленвала равен 0°, 3 - 90°, 5 - 180°, 7 - 270°, 9 совпадает с 1 - 360°/0°.
На фигурах обозначено: 1 - коленвал движителя ТС: 2 - ось поворота коленвала 1 в вариантах: 2.1 - ось среднего вала коленвала 1 или 2.2 - общая ось пары концевых валов коленвала 1; 3.1, 3.2 - пара «колесных» валов/осей (на которых закреплены колеса движителя 5.1, 5.2); 4 - шасси ТС в вариантах: 4.1 - элемент шасси ТС (наружное кольцо подшипника), используемый для крепления среднего вала коленвала 1 к шасси ТС, или 4.2 - элемент шасси ТС (подшипники), используемый для крепления концевых валов коленвала 1 к шасси ТС; 5.1, 5.2 - одинаковые колеса движителя ТС; 5.3 - отрезок воображаемой линии, соединяющей центры колес 5.1, 5.2, который можно представить как перекладину воображаемой «буквы А»; 6.1,6.2 - верхняя и нижняя границы плоской трапецевидной области возможного размещения среднего вала/оси 2.1; 7 - рукоятка управления поворотом коленвала 1; 8 - цепная передача усилия на поворот коленвала 1; 9 - задняя звездочка цепной передачи 8; 10 - задний колесный узел, который фактически является патентуемым движителем веломобиля; 11 - узел управления поворотом веломобиля; 12 - педальный привод веломобиля; 13 - переднее колесо веломобиля, 14 - шарнир угловых скоростей в составе педального привода 12; 15 - узел сиденья.
Кроме того, на фигурах обозначено:
знак Δ - точка/зона максимального сближения колес движителя 5.1, 5.2, то же, что вершина воображаемой «буквы А»;
Ов - точка - проекция середины оси поворота коленвала на плоскость рисунка, вокруг которой поворачиваем коленвал 1;
 - «луч коленвала»;
- «луч коленвала»;
→ - вектор направления движения ТС;
О.П. - опорная поверхность;
 - обозначение следа каждого колеса в момент контакта с ОП.
- обозначение следа каждого колеса в момент контакта с ОП.
Осуществление изобретения.
На фиг. 1 показан вариант движителя ТС, который содержит коленвал 1, состоящий из, жестко скрепленных или выполненных как одно целое, участков, из которых один участок является средним валом/осью (на фиг. 1 средний вал с осью 2.1 показан сплошными линиями), при этом, как возможный вариант, два участка коленвала 1 являются парой концевых валов (показаны пунктирными линиями) с общей осью 2.2, также другие два участка коленвала 1 являются парой «колесных» валов/осей 3.1, 3.2, причем указанные оси коленвала лежат в одной плоскости - в плоскости коленвала 1.
При этом коленвал 1 закреплен на шасси 4 ТС с возможностью поворота плоскости коленвала 1 вокруг некоторой оси поворота коленвала, которой может быть либо ось его среднего вала 2.1 (с прикреплением при этом вала 2.1 к элементу 4.1 шасси), либо такой осью поворота может быть общая ось 2.2 концевых валов (с прикреплением при этом указанных концевых валов к элементам 4.2 шасси), и фиксации положения относительно шасси 4 ТС, путем использования элементов управления поворотом коленвала 1.
При этом ось поворота коленвала 1 и плоскость этого коленвала перпендикулярны плоскости рисунка на виде сбоку (фиг 2 и 4), которая совпадает с направлением движения ТС и перпендикулярна ОП На фиг. 1 числами 4.1, 4.2 обозначены элементы шасси: наружные кольца подшипников.
На каждом из колесных валов 3.1, 3.2, установлено/закреплено по одинаковому колесу 5.1, 5.2, с возможностью вращения каждого колеса вокруг оси, совпадающей с соответствующей осью колесного вала 3.1, 3.2, и с возможностью преобразования вращательного движения колес 5.1, 5.2, в поступательное движение движителя или обратного преобразования движения при контакте колес с ОП.
При этом в плоскости коленвала 1 колесные валы/оси 3.1, 3.2 размещены под углом друг к другу симметрично относительно перпендикуляра к оси поворота коленвала 1 (к оси среднего вала 2.1 или к общей оси 2.2 концевых валов), опущенного на ее середину, и благодаря взаимному наклону своих колесных осей 3.1, 3.2, колеса 5.1, 5.2 также наклонены зеркально симметрично одно к другому под заданным углом с локальным сближением края колес, и с уменьшенным расстоянием в этом месте между ними, вплоть до возможного контакта, так, что диаметры колес 5.1, 5.2 в плоскости коленвала 1 образуют стороны воображаемой «буквы А», а отрезок прямой 5.3, соединяющий центры колес 5.1, 5.2, образует перекладину указанной «буквы А», также расположенную в плоскости коленвала 1. При этом в данном варианте, благодаря некоторому расстоянию между сближенными краями колес так, чтобы между ними без касания мог пройти узкий элемент шасси 4, имеется возможность поворота указанного коленвала вокруг указанной оси на заданный угол до ±360° и более относительно шасси 4 ТС.
В данном варианте ось 2.1 среднего вала, которая параллельна отрезку прямой 5.3, соединяющей центры колес 5.1, 5.2 движителя, находится дальше, чем этот отрезок 5.3, от точки/зоны локального сближения колес движителя ТС.
В других вариантах исполнения движителя ТС ось поворота коленвала 1 (здесь - именно ось 2.1 среднего вала) может совпадать с указанным отрезком 5.3, быть ближе к нему или дальше от него. При этом элементы коленвала 1, а также элементы шасси 4 не должны касаться периферийных частей колес 5.1 и 5.2 как в статике, так и в динамике.
Такая особенность конструкции движителя ТС обеспечивает свободу возможного вращения колес 5.1 и 5.2, без касания неподвижных его частей при повороте коленвала 1 во всем заданном диапазоне углов.
На фиг. 1 показана плоская область в форме симметричной трапеции, границы которой (верхняя 6.1, нижняя 6.2 полки и боковые стороны трапеции) показывают пределы возможного сдвига среднего вала 2.1 и его краев относительно отрезка прямой 5.3, в этих границах выполняются описанные выше условия отсутствия взаимного касания частей движителя. Аналогичную область можно построить для возможного сдвига концевых валов/общей оси 2.2 относительно отрезка прямой 5.3.
При этом в других вариантах движителя одно колесо или каждое из пары колес 5.1, 5.2 может быть выполнено в виде мотор-колеса с двигателем внутреннего сгорания, с электродвигателем и/или с пневмодвигателем.
При этом в указанном движителе элементом управления поворотом коленвала 1 является рукоятка 7 управления поворотом коленвала 1, путем передачи усилия пользователя на поворот коленвала, размещенная на шасси 4 ТС. Элементами механизма передачи механического момента поворота рукоятки 7 на поворот коленвала вокруг оси среднего вала 2 в данном варианте движителя является цепная передача 8 на заднюю звездочку 9, обгонный, храповой и/или затяжной, механизм (не показан) с возможным переключателем направления и/или усилия поворота коленвала 1 от цепной передачи 8 момента поворота указанной рукоятки 7, а также фиксатор (не показан) углового положения коленвала 1, который размещен на элементе шасси 4 ТС с опорой на коленвал 1. Указанные элементы (некоторые из них показаны на фиг. 3) управления поворотом коленвала скомпонованы в узел управления поворотом коленвала 1.
На фиг 3 показан вариант ТС - веломобиля, содержащего задний колесный узел 10, выполненный в виде вышеописанного движителя по изобретению, с элементами управления поворотом коленвала 1 движителя, скомпонованными в узел управления поворотом коленвала 1 (показаны: рукоятка 7 управления поворотом коленвала 1, цепная передача 8 на звездочку 9 механизма передачи усилия от рукоятки 7; не показаны: обгонный механизм, механизм переключения направления поворота коленвала 1 и фиксатор углового положения коленвала 1). Тем не менее, указанный колесный узел-движитель 10 можно конструктивно выполнить спереди, совместив с имеющимся узлом управления поворотом веломобиля 11. В конструкции предусмотрен мускульный педальный привод 12 веломобиля в движение на переднее колесо 13 через известный шарнир угловых скоростей 14 (https://ru.wikipedia.org/wiki/Шарнир_равных_угловых_скоростей - ШРУС). Также имеется узел регулируемого сиденья 15 пользователя и узел торможения (не показан) веломобиля. В составе ТС возможны также кабина или салон, элементы защиты от окружающей среды и/или кузов.
В других вариантах исполнения патентуемого ТС его моторный привод может быть выполнен в виде двигателя внутреннего сгорания, электродвигателя, пневмодвигателя, аэровоздушного, реактивного или турбовинтового двигателя или комбинированным. Собственно, патентуемое ТС может быть выполнено в виде роликовых коньков, самоката, велосипеда, инвалидной коляски, мопеда, мотороллера, мотоцикла, квадроцикла или прицепа. Также патентуемое ТС может иметь в составе гусеничный, лыжный или вездеходный движитель, быть самолетом, опорное шасси которого содержит патентуемый движитель.
Раздел «описание работы устройства» представлен выше в данном описании (стр. 12-15).

Группа изобретений относится к области безрельсовых транспортных средств, в частности к движителям транспортного средства. Движитель транспортного средства содержит коленвал, который состоит из участков, из которых один участок является средним валом/осью, а два участка являются парой валов/осей для установки колес движителя. На парных колесных валах закреплено по одинаковому колесу движителя с возможностью вращения и преобразования вращательного движения колеса в поступательное движение движителя. Колеса наклонены зеркально симметрично одно к другому. Диаметры колес образуют стороны в виде буквы «А», а отрезок прямой, соединяющей центры колес, образует перекладину буквы «А». Транспортное средство содержит шасси, на котором закреплены колесный узел, узлы привода, управления поворотом, сиденья пользователя, торможения, салон, кузов. Способ управления транспортным средством с движителем может быть использован для движения, остановки или стоянки транспортного средства. Для этого коленвал поворачивают в выбранном направлении. Для движения транспортного средства по двухколейной схеме коленвал поворачивают до нулевого угла и фиксируют. Достигается упрощение управления транспортным средством. 3 н. и 15 з.п. ф-лы, 5 ил.
1. Движитель транспортного средства, содержащий
коленвал, состоящий из жестко скрепленных или выполненных как одно целое участков, из которых, по меньшей мере, один участок является средним валом/осью, а два участка являются парой валов/осей для установки колес движителя, то есть «колесных» валов/осей, также в составе коленвала возможно наличие двух участков, которые являются парой концевых валов с одной общей осью, параллельной оси среднего вала, причем указанные оси коленвала лежат в одной плоскости - в плоскости коленвала,
при этом указанный коленвал данного движителя закреплен на шасси или на элементе шасси транспортного средства с возможностью поворота плоскости коленвала вокруг оси его среднего вала и/или вокруг общей оси концевых валов - оси поворота коленвала, на заданный угол поворота и фиксации его углового положения относительно шасси или элемента шасси транспортного средства, путем использования элементов управления поворотом коленвала,
на каждом из парных колесных валов установлено/закреплено по одинаковому колесу движителя с возможностью вращения этого колеса вокруг оси, совпадающей с осью своего колесного вала, и с возможностью преобразования вращательного движения колеса в поступательное движение движителя или обратного преобразования при контакте колеса с опорной поверхностью,
при этом ось поворота коленвала и плоскость коленвала перпендикулярны плоскости, которая совпадает с направлением движения движителя транспортного средства и перпендикулярна опорной поверхности,
отличающийся тем, что в плоскости коленвала парные колесные валы/оси размещены под углом друг к другу симметрично относительно перпендикуляра к оси поворота коленвала, опущенного на середину этой оси,
при этом, благодаря взаимному наклону своих колесных осей, колеса также наклонены зеркально симметрично одно к другому под заданным углом с локальным сближением края колес, и с уменьшенным расстоянием в этом месте между ними, вплоть до возможного контакта, так, что диаметры колес в плоскости коленвала образуют стороны в виде буквы «А», а отрезок прямой, соединяющей центры колес, образует перекладину указанной буквы «А», также расположенную в плоскости коленвала,
при этом ось поворота коленвала параллельна отрезку прямой, соединяющему центры колес движителя,
также указанная ось может совпадать с прямой, проходящей через центры колес движителя, находиться ближе, чем эта прямая, к точке/зоне локального сближения колес движителя или дальше от нее,
а элементы управления указанным поворотом коленвала могут быть скомпонованы в узел управления поворотом коленвала.
2. Движитель по п. 1, отличающийся тем, что в нем имеется возможность поворота коленвала вокруг оси его поворота на угол до ±360° и более относительно шасси транспортного средства.
3. Движитель по п. 1, отличающийся тем, что одно колесо или каждое из пары колес движителя выполнено в виде мотор-колеса с двигателем внутреннего сгорания.
4. Движитель по п. 1, отличающийся тем, что одно колесо или каждое из пары колес движителя выполнено в виде мотор-колеса с электродвигателем.
5. Движитель по п. 1, отличающийся тем, что одно колесо или каждое из пары колес движителя выполнено в виде мотор-колеса с пневмодвигателем.
6. Движитель по п. 1, отличающийся тем, что элементом управления поворотом коленвала является рукоятка или ручка управления передачей усилия пользователя на поворот коленвала, размещенная на шасси транспортного средства преимущественно в месте, удобном для регулирования рукой пользователя.
7. Движитель по п. 1, отличающийся тем, что элементом управления поворотом коленвала является механизм передачи механического момента поворота рукоятки на поворот коленвала вокруг оси поворота коленвала.
8. Движитель по п. 1, отличающийся тем, что элементом управления поворотом коленвала является обгонный, храповой и/или затяжной, механизм с возможным переключателем направления и/или усилия поворота коленвала от механизма передачи момента поворота указанной рукоятки.
9. Транспортное средство, содержащее
шасси, на котором или на элементе которого закреплены: по меньшей мере один колесный узел, который содержит два колеса, в качестве движителя транспортного средства, с осями их вращения, находящимися в плоскости, которая перпендикулярна направлению движения указанного колесного узла транспортного средства,
при этом с возможностью постоянного закрепления указанного колесного узла или его поворота вдоль опорной поверхности для изменения направления движения транспортного средства,
при этом в конструкции транспортного средства возможно наличие:
узла привода транспортного средства в движение, мускульного и/или моторного,
узла управления поворотом транспортного средства,
по меньшей мере, одного узла сиденья пользователя(ей),
и/или узла торможения транспортного средства,
в составе транспортного средства возможны также кабина или салон, элементы защиты от окружающей среды и/или кузов,
отличающееся тем, что,
по меньшей мере, один указанный колесный узел выполнен в виде движителя транспортного средства по п. 1 с элементами управления поворотом коленвала движителя, которые скомпонованы в узел управления поворотом коленвала,
при этом в составе указанных элементов или указанного узла управления поворотом коленвала возможно наличие элементов управления: рукоятки, привода и/или механизма управления, обеспечивающих соответствующий поворот, фиксацию или стопорение, в возможном заданном режиме, углового положения коленвала движителя относительно шасси или элемента шасси транспортного средства.
10. Транспортное средство по п. 9, отличающееся тем, что его моторный узел выполнен в виде двигателя внутреннего сгорания, электродвигателя или пневмодвигателя или комбинированным с ними.
11. Транспортное средство по п. 9, отличающееся тем, что его моторный узел выполнен в виде аэровоздушного, реактивного или турбовинтового двигателя или комбинированным с ними.
12. Транспортное средство по п. 9, отличающееся тем, что оно выполнено в виде роликовых коньков, самоката, велосипеда или веломобиля.
13. Транспортное средство по п. 9, отличающееся тем, что оно выполнено в виде инвалидной коляски.
14. Транспортное средство по п. 9, отличающееся тем, что оно выполнено в виде мопеда, мотороллера, мотоцикла или квадроцикла.
15. Транспортное средство по п. 9, отличающееся тем, что оно имеет в составе гусеничный, лыжный или вездеходный движитель.
16. Транспортное средство по п. 9, отличающееся тем, что оно является самолетом, опорное шасси которого содержит движитель по п. 1.
17. Транспортное средство по п. 9, отличающееся тем, что оно выполнено в виде прицепа.
18. Способ движения транспортного средства с движителем по п. 1, отличающийся тем, что
в процессе движения транспортного средства, его остановки или стоянки поворачивают коленвал в выбранном направлении, вместе с воображаемым «лучом коленвала», вокруг оси поворота коленвала относительно «начального луча», то есть начального положения коленвала, считая положительным изменение угла поворота коленвала, совпадающее с направлением движения транспортного средства, а также устанавливают и/или фиксируют его положение, путем поворота рукоятки управления положением коленвала движителя транспортного средства и передачи усилия от рукоятки на поворот, стопорение или фиксирование положения коленвала в любой очередности действий так, чтобы угол поворота коленвала принимал заданное значение,
с возможностью повторно изменять угловое положение коленвала или обеспечивать выбранное угловое положение коленвала путем его фиксации или закрепления,
при этом, чтобы обеспечить движение движителя транспортного средства по широкой двухколейной схеме,
поворачивают коленвал движителя до совпадения «начального луча» и «луча коленвала», то есть до нулевого угла, и фиксируют это угловое положение коленвала, при этом, чтобы обеспечить движение движителя транспортного средства по узкой двухколейной схеме,
поворачивают коленвал движителя до значения угла поворота: ±180° от положения «начального луча» и фиксируют это угловое положение коленвала,
при этом, чтобы обеспечить торможение транспортного средства с использованием патентуемого движителя по схеме «плуга»,
поворачивают коленвал движителя, с отсчетом угла от «начального луча» при повороте в положительную сторону до выбранного угла поворота в диапазоне: от 0 ° до +180 °, при этом максимальное усилие торможения наступит при угле поворота коленвала, равном: +90 °, или при повороте в отрицательную сторону до выбранного угла поворота в диапазоне: от -180° до -360°, при этом максимальное усилие торможения наступит при угле поворота коленвала, равном: -270 °,
при этом, чтобы обеспечить торможение транспортного средства с использованием патентуемого движителя по схеме «якоря»,
поворачивают коленвал движителя, с отсчетом угла от «начального луча», при повороте в положительную сторону до выбранного угла поворота в диапазоне: от +180° до +360°, при этом максимальное усилие торможения наступит при угле поворота коленвала, равном: +270°, или при повороте в отрицательную сторону до выбранного угла поворота в диапазоне: от 0° до -180°, при этом максимальное усилие торможения наступит при угле поворота коленвала, равном: -90°.
| Спортивная коляска для инвалидов | 1990 |
|
SU1821183A1 |
| ШАГАЮЩИЙ ДВИЖИТЕЛЬ | 2013 |
|
RU2513348C1 |
| Способ декоративной отделки и облицовки поверхностей | 1953 |
|
SU101632A1 |
| Способ флотации руд | 1941 |
|
SU62813A1 |
| WO 2017037648 A1, 09.03.2017. | |||

