(54) ДАТЧИК СКОРОСТИ ВРАЩЕНИЯ

| название | год | авторы | номер документа |
|---|---|---|---|
| Преобразователь угол-код | 1974 |
|
SU512483A1 |
| Датчик скорости вращения | 1976 |
|
SU600446A2 |
| Преобразователь угла поворота антенны радиолокационной станции в код | 1983 |
|
SU1119052A1 |
| Датчик положения ротора вентильного двигателя | 1978 |
|
SU748701A1 |
| Устройство для формирования азимутальных отметок | 1974 |
|
SU487361A1 |
| Многоканальный преобразователь угол-код | 1980 |
|
SU877592A1 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ВРАЩЕНИЯ ВАЛА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2017156C1 |
| Электропривод | 1985 |
|
SU1354380A1 |
| Датчик скорости вращения | 1979 |
|
SU830246A1 |
| Двухотсчетный преобразователь угол-код | 1974 |
|
SU519747A1 |

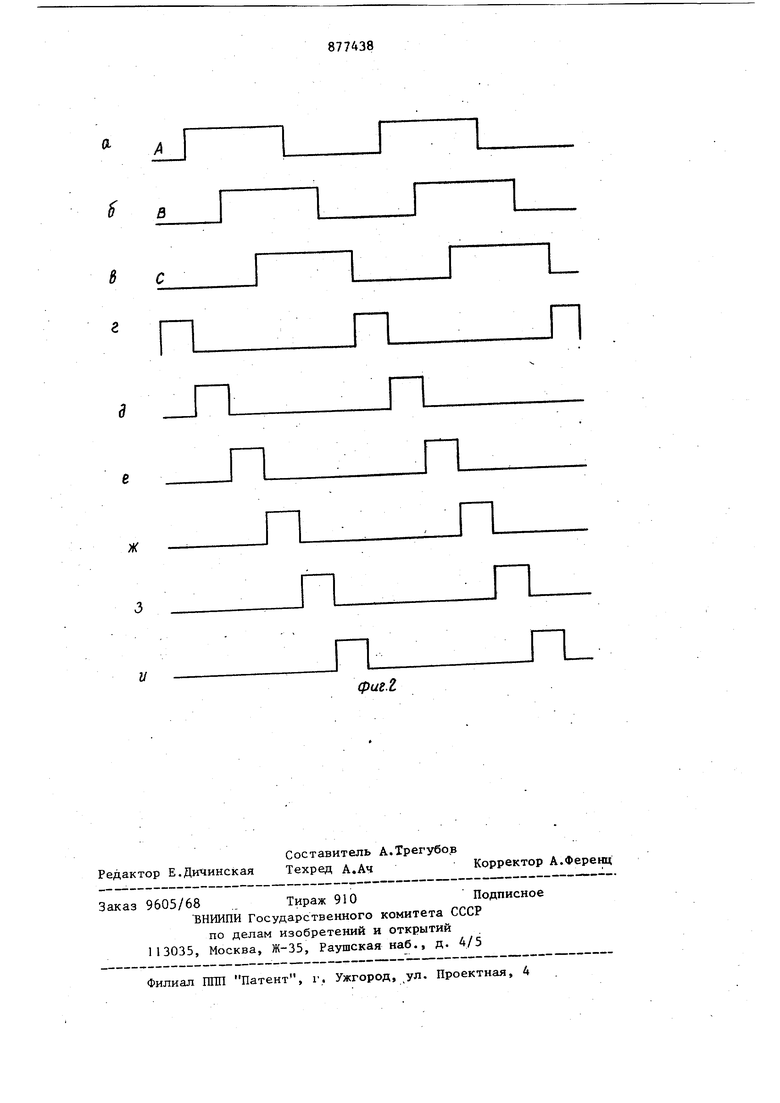
. Изобретение относится к измерь тельной технике и может быть использовано в комбинированных сдедящих сис темах, в которых полярность напряжения тахогенератора должна изменяться с изменением направления вращения. По основному авт.св. №481835 известен датчик скорости вращения, содержащий сельсин и блок преобразования, состоящий из трех фазовых детекторов, трех фильтров нижних частот, дифференциатора, схемы вьщеления модуля, дешифратора, трех компараторов и трех ключей, аналоговые, входыкоторых соединены с соответствующими выхо дами, фильтров нижних частот, которые в сочетании из трех по два соединены с соответствующими входами трех компараторов, выходы компараторовсоединены с соответствующими входами дешифратора, каждый из трех выходов которого соединен с управляющим входом одного из соответствующих ключей выходы которых соединены с входом дифференциатора, причем выходные концы трех фазных обмоток сельсина подключены к входам соответствующих фазовых детекторов в том же сочетании С Недостатком известного устройства является отсутствие информации о направлении вращения контролируемого объекта. Цель изобретения - получение информации о направлении вращения контролируемого объекта-. Поставленная цель достигается тем, что в устройство дополнительно введены блок реверса и логический блок, содержащий четыре логических элемента , четыре логических элемента И, логический элемент НЕ и триггер, при этом первый вход блока реверса соединен с выходом блока пре.образования, а второй вход блока реверса соединен с выходом триггера, выходы нечетных и четных секторов блока преобразования соединены соответственно через первую и вторую схемы ИЛИ с первыми входами схем И, причем выход первой схемы ИЛИ соединен со входами первой и второй схем И, выход второй схемы ИЛИ соединен со входами третьей и четвертой схем И, вторые входы первой и третьей схем И соединены со входом схемы НЕ и с выходом дифференциатора блока преобразования, .вторые входы второй и четвертой схем И соединены с выходом схемы НЕ, выход первой схемы И соединен с первым входом третьей схе мы ИЛИ, вторрй вход которой соединен с выходом четвертой схемы И, выход третьей схемы И соединен с первым входом четвертой схемы ИЛИ, второй вход которой соединен с выходомвтор схемы И, а выходы третьей и четверто схем ИЛИ соединены соответственно с первым и вторым входами триггера. На фиг. 1 представлена структурна схема датчика , на фиг. 2 - эфиры напряжений, где01,(Г ,. - исходные сигналы, полученные сравнением напря жений фаз датчика трехфазного напряжения, взятые в сочетании из трех по два (сигналы А, В и C);Z , б, управляющие сигналы нечетных секторо бесконтактного датчика скорости; д, Otc, U. - управляющие сигналы четных секторов бесконтактного датчика скорости. Датчик скорости вращения состоит из сельсина 1, блока 2 преобразования, блока 3 реверса, логического блока 4, состоящего из логических элементов ИЛИ 5 и 6, логического эл мента НЕ 7, логических элементов И 8-11, логических элементов ИЛИ 12 и 13 и триггера 14. Выходы нечетных и четных секторов блока 2преобразования подсоединены ко входам элементов ИЛИ 5 и 6 соответственно, а выход дифференциатора блока преобразования подключен ко входу элемента НЕ 7 и входам элементов И 8 и 10 в то время, как выход блока преобразования соединен с блоком 3 реверса, управляющий вход которого подключен R выходу логического блока 4. Каждая фаза сельсина 1 соединена с соответствующим входом бесконтактного датчика 2 скорости. Выход бесконтактного датчика скорости вращения осущес ляется с блока 3 реверса, На выходных фазах сельсина 1 имеется три переменных синусоидальных аналоговых сигнала, огибающие кото рых сдвинуты друг относительно друга на 120 . Пофазно указанные сигналы поступают на блок 2 преобразования. По сигналам огибающих за один оборот вала могут быть определены три сектора А, В и С (фиг, 20, сГ, ), представляющие собой уровни напряжений, границы которых определяются сравнением между собой по амплитуде выделенных огибающих.После логических операций с полученными уровнями осуществляется формирование шести управляющих сигналов, изображенных на фиг, 2Z-LU. каждый из которых соответствует 60 оборота вала сельсина 1, При этом первый управляющий сигнал 2 определяется логической схемой, составленной на основе уравнения авс, второй d - на основе уравнения Авс, третий в - АВс, четвертый )t6-ABC, пятый и шестой и- авС, Начало отсчета секторов производится от нулевого положения датчика, соответствующего минимальному напряжению между выходными сигналами первой и. второй фазы датчика. Управляющие сигналы нечетных секторов соответствуют сигналам 2. . б , . Управляющие сигналы четных секторов соответствуют сигналам д Ж , It . Управляющие сигналы четных и нечетных секторов в блоке 2 преобразования обеспечивают коммутацию огибающих Напряжений таким образом, что на вход дифференциатора блока 2 преобразования подключаются отрезки синусоид, соответствующие отрезкам линейно нарастающего или линейно падающего напряжений, имеющие наибольшую крутизну и линейность в пределах каждого из сигналов управления секторами. Выходное напряжение датчика скорости вращения, получаемое с выхода блока 3 реверса, в зависимости от направления вращения сельсина 1 будет определяться четностью сектора и полярностью выходного напряжения дифференциатора блока 2 преобразования, поступающими на вход логического блока 4, В качестве блока 3 реверса может быть использован операционный усилитель с коэффициентом передачи, равным единице, выходное напряжение которого может менять полярность в зависимости от сигнала управления логическим блоком. Любому пространственному положению сельсина 1 соответствует наличие одного из шести управляющих сигналов т.е. с выхода одного из элементов ИЛИ 5 или 6 выдается разрешающий уровень на входы элементов И 8, 9 или И 10, 11. Так, например, при нахождении сельсина 1 в положении, соответствующем управляющему сигналу нечетного сектора, с выхода логинеского элемента ИЛИ 5 поступает разрешающий уровень напряжения на первые входы элементов И 8 и И 9. При наличии положительного значения напряжения с выхода дифференциатора блока преобразования 2, поступающего на вход логического элемента НЕ 7 логического блока 4, выходное напряжение элемента И 8 через логический элемент ИЛИ 12 устанавливает триггер 14 в такое состояние, при которо он выдает на управляющий вход блока 3 реверса сигнал управления, соответ ствующий передаче постоянного напряжения, пропорционального скорости вращения сельсина 1 при его прямом направлении вращения. При наличии отрицательного значения напряжения с выхода дифференциатора, поступакице го на вход элемента НЕ 7, разрешающи уровень на его выходе через элемент И 9 и логический элемент ИЛИ 13 уста навливает триггер 14 в противоположное состояние. Этим самым на управля щий вход блока 3 реверса поступает инверсный сигнал управления и на его выходе обеспечивается постоянное напряжение, пропорциональное скорости вращения сельсина 1 при его обратном направлении вращения. Аналогично описанному при пространственном положении сельсина 1, со ответствующем четному сектору управляющего сигнала, отрицательным или положительным значениям напряжения с выхода дифференциатора блока преоб разования 2 производится управление состоянием триггера 14 через логические элементы И 11 и ИЛИ 12 или И 10 и ИЛИ 13. При этом бесконтактный датчик скорости вращения на свое выходе будет иметь напряжение, пропорциональное скорости вращения Датчика 1, в зависимости от направле иня его вращения. 86 Предлагаемая конструкция датчика скорости вращения позволит его использовать в комбинированных следящих системах, в которых необходима информация о направлении вращения контролируемого объекта. Формула изобретения Датчик скорости вращения по авт. св. №481835, отл.и чающийся тем, что, с целью получения информа-. ции о направлении вращения контролируемого объекта, в него дополнительно введены блок реверса и логический блок, содержащий четыре логических элемента ИЛИ, четыре логических элемента И, логический элемент НЕ и триггер, при этом первый вход блока реверса соединен с вьпсодом блока преобразования, а второй вход блока реверса соединен с выходом триггера, выходы нечетных и четных секторов блока преобразования соединены соответственно через первую и вторую схемы ИЛИ с первыми входами схем И, причем выход первой хемы ИЛИ соединен со входами первой и второй схем И, выход второй схемы ИЛИ соединен со входами третьей и четвертой схем И, вторые входы первой и третьей схем И соединены со входом схемы НЕ и с выходом дифференциатора блока преобразования, вторые входы второй и четвертой схем И соединены с выходом схемы НЕ, выход первой схемы И соединен с первым входом третьей схемы ИЛИ, второй вход которой соединен с выходом четвертой схемы И, выход третьей схемы И соединен с первым входом четвертой схемы ИЛИ, второй вход которой соединен с выходом второй схемы И, а выходы третьей и четвертой схем ИЛИ соединены, соответственно с первым и вторым входами триггера.. Источники информации, принятые во внимание при экспертизе I. Авторское свидетельство СССР №481835, кл. С, 01 Р 3/46, 1973.
V
фие.г
