(54) ДАТЧИК АЭРОДИНАМИЧЕСКИХ УГЛОВ
| название | год | авторы | номер документа |
|---|---|---|---|
| ДАТЧИК АЭРОДИНАМИЧЕСКИХ УГЛОВ | 1978 |
|
SU702795A1 |
| ДАТЧИК АЭРОДИНАМИЧЕСКИХ УГЛОВ ЛЕТАТЕЛЬНОГО АППАРАТА | 1973 |
|
SU466786A1 |
| ПРЕОБРАЗОВАТЕЛЬ АЭРОДИНАМИЧЕСКИХ УГЛОВ | 1974 |
|
SU490339A1 |
| Кинематический датчик аэродинамического угла и истинной воздушной скорости | 2019 |
|
RU2737518C1 |
| МЕТОЧНЫЙ ДАТЧИК АЭРОДИНАМИЧЕСКОГО УГЛА И ИСТИННОЙ ВОЗДУШНОЙ СКОРОСТИ | 2014 |
|
RU2580208C1 |
| БОРТОВАЯ СИСТЕМА ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВЕКТОРА СКОРОСТИ ВЕТРА НА СТОЯНКЕ, СТАРТОВЫХ И ВЗЛЕТНО-ПОСАДОЧНЫХ РЕЖИМАХ ВЕРТОЛЕТА | 2014 |
|
RU2587389C1 |
| МЕТОЧНЫЙ ДАТЧИК АЭРОДИНАМИЧЕСКОГО УГЛА И ВОЗДУШНОЙ СКОРОСТИ | 2010 |
|
RU2445634C2 |
| Система воздушных сигналов вертолета | 2018 |
|
RU2695964C1 |
| ИЗМЕРИТЕЛЬ АЭРОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ЛЕТАТЕЛЬНОГО АППАРАТА | 1987 |
|
SU1559894A1 |
| СИСТЕМА ИЗМЕРЕНИЯ МАЛЫХ ВОЗДУШНЫХ СКОРОСТЕЙ ВЕРТОЛЕТА | 2009 |
|
RU2426995C1 |
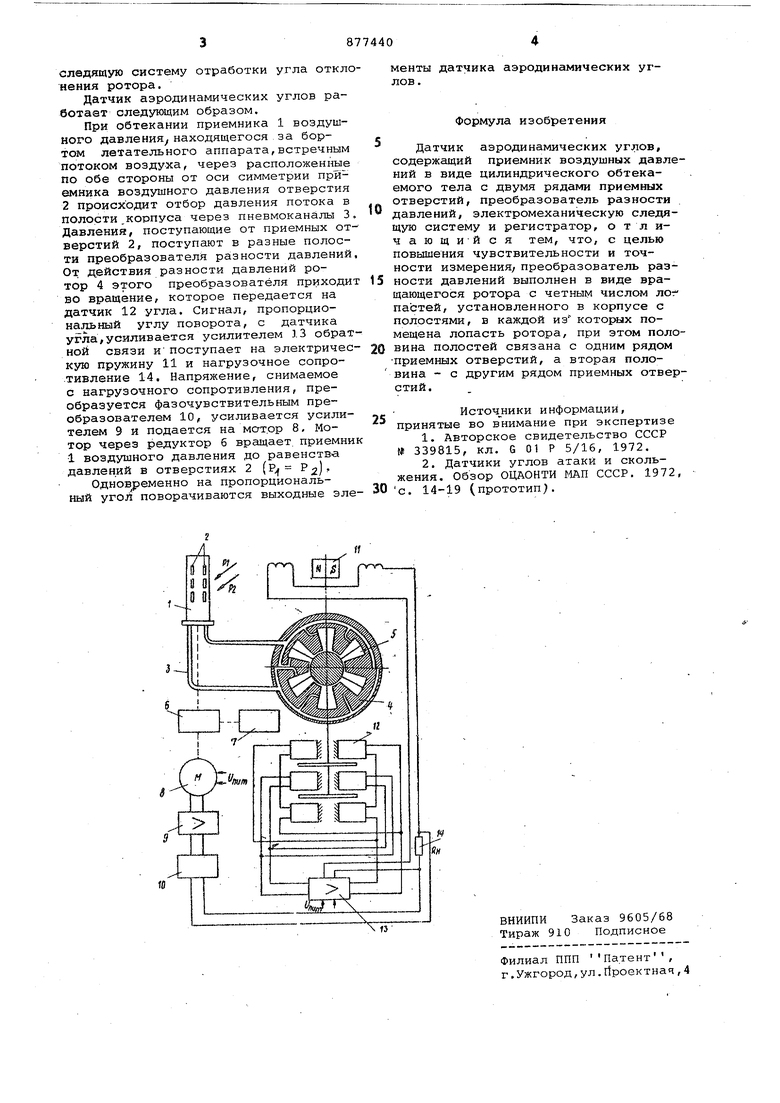
Изобретение относится к авиаприборостроению и может быть использова но при измерении аэродинамических уг лов во время полета летательных аппаратов . Известны устройства для измерени аэродинамических углов, содержащие диск со штуцерами и тремя приемными отверстиями,аэродинамический компенсатор в виде обтекаемого тела, связанный со штуцерами через полости, выполненные в диске Cl Недостатками этих устройств являются малая точность и чувствительность измерений, низкая надежность конструкции. Наиболее близким к предлагаемому является датчик аэродинамических углов, содержащий приемник воздушных давлений в виде цилиндрического обте каемого тела с двумя рядами приемных отверстий, преобразователь разности давлений, электромеханическую следящую систему и регистратор L2J. Недостатками известного устройств являются невысокая точность и чувствительность измерений. Цель изобретения - повышение чувс вительности и точности измерения. Поставленная цель достигается тем, что преобразователь разности давлений выполнен в виде легкого вращающегося ротора с четным числом лопастей, установленного в корпусе с полостями , в каждой из которых помещена лопасть ротора, при этом половина полостей связана с одним рядом приёмных отверстий, а вторая половина полостей - с другим рядом приемных отверстий. На чертеже приведена принципиальная схема датчика аэродинамических углов. Датчик аэродинамических углов состоит из приемника 1 воздушных давлений с двумя рядами приемных отверстий 2, связанных пневмоканалами 3 с полостями корпуса, в котором размещен преобразователь разности давлений в виде ротора 4 с четным числом лопастей 5, редуктора б с выходным элементом 7, мотора 8, связанного с усилителем 9 и фазочувствительным преобразователем 10, электрической пружины 11, вьадающей сигнал на датчик 12угла, усилителя 13 и нагрузочного сопротивления 14, образующими в совокупности электромеханическую
следящую систему отработки угла отклонения ротора.
Датчик аэродинамических углов работает следующим образом.
При обтекании приемника 1 воздушного давления, находящегося за бортом летательного аппарата,встречным потоком воздуха, через расположенные по обе стороны от оси симметрии приемника воздушного давления отверстия 2 происходит отбор давления потока в полости,корпуса через пневмоканалы 3, Давления, поступающие от приемных от-верстий 2, поступают в разные полости преобразователя разности давлений, От действия разности давлений ротор 4 этого преобразователя приходит во вращение, которое передается на датчик 12 угла. Сигнал, пропорциональный углу поворота, с датчика угла,усиливается усилителем 13 обратной связи Ипоступает на электрическую пружину 11 и нагрузочное сопротивление 14. Напряжение, снимаемое с нагрузочного сопротивления, преобразуется фазочувствительным преобразователем 10, усиливается усилителем 9 и подается на мотор 8, Мотор через редуктор б вращает, приемник 1 воздушного давления до равенства давлений в отверстиях 2 (Р
Одновременно на пропорциональный угол поворачиваются выходные элементы датчика аэродинамических углов .
Формула изобретения
Датчик аэродинамических углов, содержащий приемник воздушных давлений в виде цилиндрического обтекаемого тела с двумя рядами приемных отверстий, преобразователь разности давлений, электромеханическую следящую систему и регистратор, о т л ич ающий ся тем, что, с целью повышения чувствительности и точности измерения/ преобразователь разности давлений выполнен в виде вращающегося ротора с четным числом лотпастей, установленного в корпусе с полостями, в каждой из которых помещена лопасть ротора, при этом полоQ вина полостей связана с одним рядом
приемных отверстий, а вторая половина - с другим рядом приемных отверстий.
Источ ники информации, принятые во внимание при экспертизе
30 с. 14-19 (прототип.
