Изобретение относится к области метеорологического приборостроения, в частности к устройствам для измерения величины (модуля) и направления вектора скорости ветра на борту вертолета на стоянке до запуска силовой установки, на стоянке при вращении несущего винта, при рулении и маневрировании по земной поверхности (стартовые режимы), при взлете, снижении, висении и посадке (взлетно-посадочные режимы). Достоверная информация о величине и направлении вектора скорости ветра относительно продольной оси вертолета необходима экипажу для предотвращения авиационных происшествий, связанных с опрокидыванием вертолета на бок и на хвостовой винт, соударением несущего винта с землей и с хвостовой балкой и т.п. (см. статью: Ерусалимский М.А., Егоров В.Н. Экипажам вертолетов - информационную поддержку. // Авиасоюз. - 2011. №2 - с. 24-26 - [1]) при превышении параметров вектора скорости ветра ограничений, регламентируемых Руководством по летной эксплуатации вертолета (см.: Руководство по летной эксплуатации вертолета Ми-8 (издание 4). - М.: Авторитет. - 1996. - 554 с. - [2]).
Известны устройства (датчики) для измерения скорости и направления вектора скорости ветра, реализующие тахометрический метод, которые содержат, реагирующие на скорость набегающего воздушного потока винтокрылые ветроприемные устройства (ветроприемники), реагирующие на скорость набегающего воздушного потока, жестко ориентируемые в пространстве относительно друг друга. Набегающий воздушный поток приводит во вращение ветроприемники. По частоте и направлению вращения ветроприемников, регистрируемых тахометрическими преобразователями, вычисляются скорость и направление вектора скорости ветра, (Патент РФ на изобретение №2030749. Датчик параметров ветра (Атрощенков В.Г., Блящев В.В., Павлов А.Л. - [3]).
Указанные устройства имеют вращающиеся элементы, сложную конструкцию и ограниченный диапазон измерения угла направления вектора скорости ветра. Кроме того, при установке таких устройств на фюзеляже вертолета на их работу будут оказывать существенное влияние индуктивные потоки несущего винта, ограничивающие возможность измерения параметров вектора скорости ветра на стоянке при вращении несущего винта, на стартовых и взлетно-посадочных режимах вертолета.
Известны устройства для измерения параметров вектора скорости ветра, реализующие флюгерно-тахометрический метод измерения, в которых вращающийся винтокрылый ветроприемник устанавливается на флюгере, свободно ориентируемом по направлению вектора скорости ветра. Регистрируя угловое положение флюгера, например с помощью синусно-косинусного трансформатора и частоту вращения винтокрылого ветроприемника в вычислительном устройстве определяются параметры вектора скорости ветра (см. книгу: Приборы и установки для метеорологических измерений на аэродромах / Под ред. Л.П. Афиногенова и Е.В. Романова. - Л.: Гидрометеоиздат. - 1981. - 296 с. - [4]).
Указанные устройства также имеют установленные в набегающем воздушном потоке вращающейся и подвижные элементы, снижающие надежность их работы в бортовых условиях. При установке таких устройств на фюзеляже вертолета на их работу также будут оказывать существенное влияние воздушные потоки вихревой колонны несущего винта, ограничивающие возможность измерения параметров вектора скорости ветра на стоянке при вращении несущего винта, на стартовых и взлетно-посадочных режимах вертолета.
Известны устройства для измерения скорости и направления набегающего воздушного потока, реализующие аэрометрический метод, в которых в набегающий воздушный поток устанавливается неподвижный или ориентируемый по потоку аэрометрический приемник, например в виде сферы, полусферы или цилиндра и регистрируются давления, воспринимаемые на поверхности приемника, по которым определяются величина и направление вектора скорости набегающего воздушного потока (см. книги: Петунии А.Н. Методы и техника измерения параметров газового потока (Приемники давления с коростного напора). - М.: Машиностроение. - 1972. - 332 с. - [5]; Солдаткин В.М. Методы и средства измерения аэродинамических углов летательных аппаратов. - Казань: Изд-во Казан. гос. техн. ун-та. 2001. - 448 с. [6]).
Указанные устройства могут быть использованы и для измерения параметров вектора скорости ветра. Однако при использовании в качестве ветроприемника неподвижного аэрометрического приемника в виде сферы, полусферы или цилиндра такие устройства имеют ограниченный диапазон измерения углов направления вектора скорости ветра. При использовании аэрометрического приемника, ориентируемого по направлению набегающего воздушного потока из-за наличия следящего привода усложняется конструкция и снижается надежность работы таких устройств для измерения параметров вектора скорости ветра. Кроме того, при установки неподвижного или ориентируемого по потоку аэрометрического приемника на фюзеляже вертолета на их работу существенное влияние будет оказывать вихревая колонна несущего винта, ограничивая возможность измерения параметров вектора скорости ветра на стоянке при вращении несущего винта, на стартовых и взлетно-посадочных режимах вертолета.
Известна автоматическая метеостанция с неподвижным ветроприемным устройством, реализующая кинематический метод измерения, которое представляет собой сферу в виде двух ортогональных трубчатых колец, на которых закреплены восемь ультразвуковых пьезокерамических преобразователей, образующих четыре пары излучателей и приемников, которые располагаются в противоположных вершинах куба на одинаковом расстоянии друг от друга. По разности прохождения ультразвуковых акустических сигналов от излучателей до приемников, обусловленных геометрическим сложением скорости распространения звука и проекций вектора скорости ветра на линии распространения ультразвуковых колебаний в вычислительном устройстве определяются горизонтальная и вертикальная составляющие векторы скорости ветра, а также величина и направление горизонтального ветра (см. статью: Азбукин А.А., Богушевич А.Я., Кобзов А.А. и др. Автоматические метеостанции АМК-03 и их модификации // Датчики и системы. - 2012. - №3. - с. 42-52 - [7]).
Такая конструкция ветроприемного устройства (датчика скорости ветра) обладает повышенной механической жесткостью, что позволяет использовать ее как в стационарных, так и в мобильных (бортовых) модификациях приборов, к которым предъявляются требования по устойчивости к воздействию ударных и вибрационных нагрузок.
Однако при установке такого устройства (системы) измерения параметров вектора скорости ветра на фюзеляже вертолета на его (ее) работу также будут оказывать существенное влияние индуктивные потоки вихревой колонны несущего винта, ограничивающие возможность измерения параметров вектора скорости ветра на стоянке при вращении несущего винта и на стартовых и взлетно-посадочных режимах вертолета.
За прототип взят неподвижный панорамный меточный датчик аэродинамического угла и истинной воздушной скорости, который можно использовать для измерения величины и направления вектора скорости ветра в горизонтальной плоскости. В таком датчике реализуется кинематический метод измерения параметров вектора набегающего воздушного потока (вектора скорости ветра), при котором в набегающий воздушный поток с помощью искрового разрядника, подключенного к генератору ионных меток, вносится ионная метка с явно выраженным электростатическим зарядом, которая движется совместно с потоком и приобретает его параметры движения - скорость и направление. При перемещении ионной метки совместно с набегающим воздушным потоком ее скорость и направление регистрируется системой приемных электродов, расположенных на одинаковом расстоянии по окружности с центром в точке расположения искрового разрядника и генерации ионной метки. Приемные электроды подключены к блоку предварительных усилителей, выходные сигналы которого поступают на вход измерительной схемы. Измерительная схема выполнена в виде канала измерения истинной воздушной скорости, канала определения рабочего сектора измеряемого угла, являющегося каналом грубого отсчета, и канала точного измерения угла в рабочем секторе, подключенных к входу вычислительного устройства, выходы которого являются цифровыми кодами по измеряемому аэродинамическому углу и истинной воздушной скорости (углу направления и скорости горизонтального ветра) (Патент РФ на изобретение №2445634, МПК G01P 5/14. Меточный датчик аэродинамического угла и воздушной скорости / Танеев Ф.А., Солдаткин В.М., Уразбахтин И.Р. и др. Заявл. 05.05.2010. №201018253/28. Опубл. 20.03.2012. Бюл. №8 - [8].
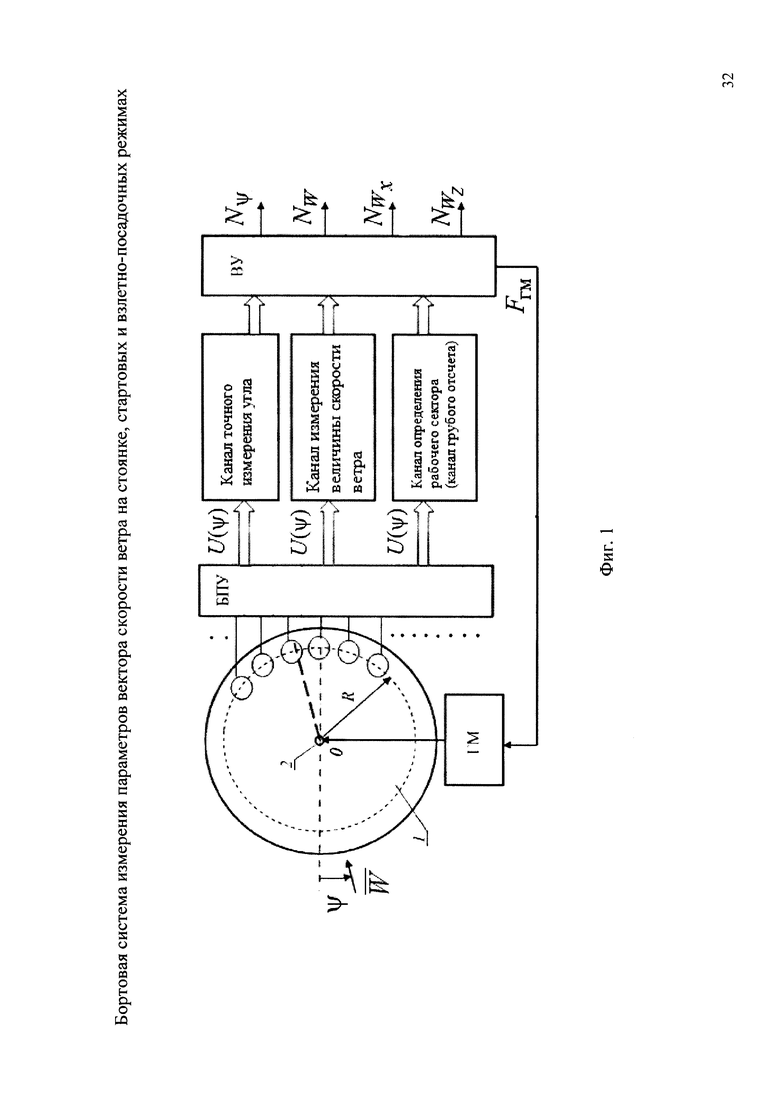
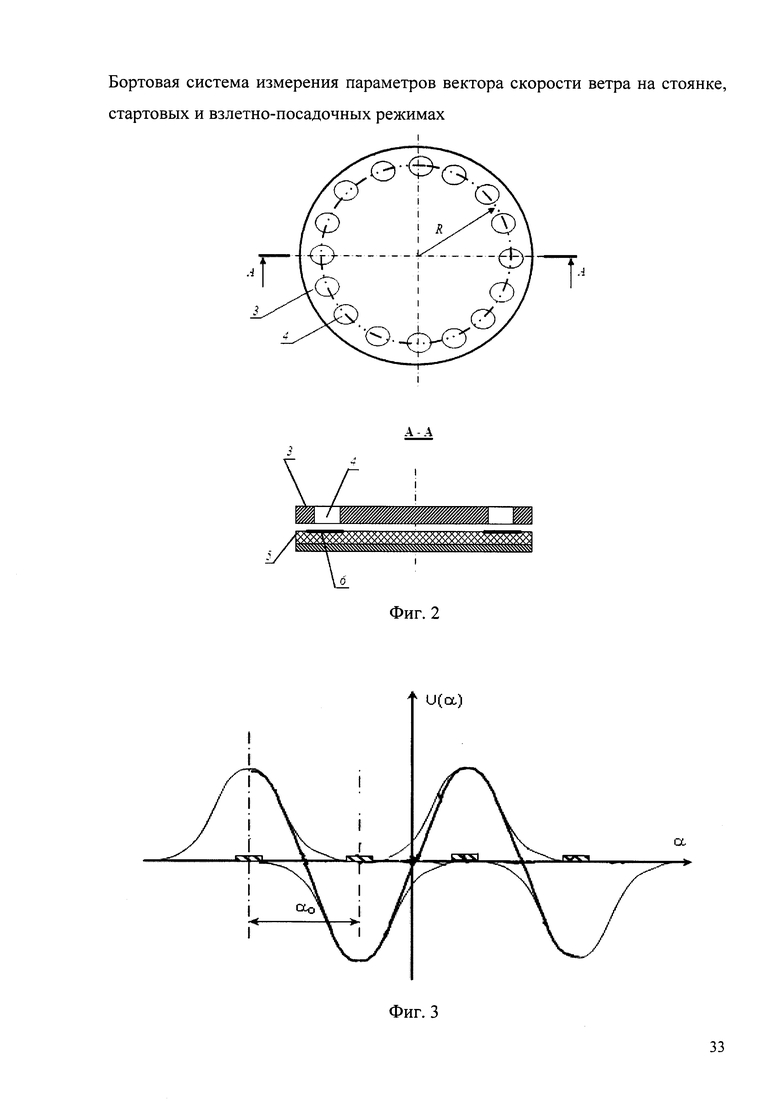
На фиг. 1 показана функциональная схема устройства-прототипа. На фиг. 2 показана конструктивная схема системы приемных электродов, на фиг. 3 показан принцип формирования синусоидального и косинусоидального информативных сигналов с помощью системы расположенных по окружности дискретных приемных электродов.
Функциональная схема устройства - прототипа (фиг. 1) содержит систему приемных электродов 1 в виде круглых металлических пластин, расположенных на одинаковом расстоянии по окружности с радиусом R с центром в точке 0 генерации ионной метки. Приемные электроды соединены с входами предварительных усилителей канала регистрации ионной метки, расположенных в блоке предварительных усилителей БПУ и образуют канал регистрации ионных меток. Выводы блока предварительных усилителей подключены к входу канала определения рабочего сектора измеряемого угла ψ направления горизонтального вектора скорости ветра 

В вычислительном устройстве ВУ также формируется сигнал FГМ, который является управляющим сигналов входа генератора меток ГМ и задает частоту генерации ионных меток и начало цикла измерения.
Система приемных электродов выполнена на основе металлической маски (фиг. 2), которая представляет собой тонкую металлическую пластину 3, на которой имеются отверстия 4, расположенные на одинаковом расстоянии l по окружности радиусом R. Под маской 3 находится диэлектрическая плата 5 с приемными электродами 6. электроды 6 располагаются непосредственного под отверстиями 4 металлической маски 3.
Данная конструкция системы приемных электродов является достаточно простой для реализации и позволяет обеспечить высокую точность формирования синусоидальных и косинусоидальных угловых характеристик информативных сигналов приемных электродов (фиг. 3). Форма угловой характеристики многоэлементной электродной системы определяется формой характеристики отдельного дискретного приемного электрода, взаимным расположением электродов и схемой подключения их к предварительным усилителям канала регистрации ионных меток.
Меточный датчик аэродинамического угла и воздушной скорости работает следующим образом.
Меточный датчик аэродинамического угла и воздушной скорости устанавливается на вертолете таким образом, чтобы система приемных электродов 1 (фиг. 1) находилась в плоскости изменения измеряемого угла ψ вектора скорости ветра
За счет выбора конструктивных параметров системы приемных электродов (фиг. 2) с помощью четных приемных электродов формируются положительные и отрицательные полуволны синусоидальных угловых характеристик информативных сигналов U(ψ) (фиг. 3) на выходе четных предварительных усилителей.
С помощью нечетных приемных электродов формируются положительные и отрицательные полуволны косинусоидальных угловых характеристик информативных сигналов U(ψ) (фиг. 3) на выходе нечетных предварительных усилителей.
Выходные сигналы предварительных усилителей ПУ блока предварительных усилителей БПУ (фиг. 1) подаются на входы канала определения рабочего сектора (канал грубого отсчета) измеряемого угла ψ, канал точного измерения угла в рабочем секторе и канал измерения величины W скорости ветра. Выходные сигналы указанных каналов подаются на входы вычислительного устройства ВУ, который по результатам обработки входной информации выдает цифровые коды Nψ и NW по измеряемому направлению угла ψ и скорости ветра W.
С учетом попадания траектории ионной метки в i-й грубый канал текущее значение измеряемого угла ψ определяется как

где α0 - угол, охватывающий рабочий сектор грубого канала отсчета (при imax=4, α0=90°); i - номер рабочего сектора 
Сигналы, пропорциональные синусу Asinαi и косинусу Acosαi, измеряемого угла в рабочем секторе грубого канала обрабатываются в вычислительном устройстве, на выходе которого выдается цифровой код Nαm, связанный со значение αp измеряемого угла в пределах рабочего сектора точного канала соотношением

где αi - текущее значение измеряемого угла в пределах i-го рабочего сектора.
При работе канала измерения величины (модуля) скорости вектора ветра W формируется интервал времени τW пролета ионной метки расстояния R от точки генерации ионной метки до окружности с приемными электродами. В соответствии с интервалом времени τW в вычислительном устройстве вырабатывается цифровой код NW пропорциональный величине скорости ветра

Цифровые коды Nψ и NW подаются на средства отображения информации к другим потребителям.
Таким образом, меточный датчик аэродинамического угла и истинной воздушной скорости позволяет измерять величину (модуль) и направление горизонтального вектора скорости ветра на стоянке до запуска силовой установки.
В меточном датчике аэродинамического угла и воздушной скорости реализуется кинематический метод измерения величины (модуля) и угла направления вектора скорости ветра, при котором точность измерения угла направления ψ и скорости ветра W не зависит от состояния окружающей среды (температуры, атмосферного давления, плотности, влажности и т.п.).
Выполнение системы приемных электродов в виде расположенных по окружности металлических пластин, установленных под отверстиями маски, позволяет сформировать логометрические информативные сигналы с синусоидальной и косинусоидальной угловыми характеристиками и обеспечить измерение угла направления вектора скорости ветра во всем диапазоне его измерения, т.е. от 0 до 360° или ±180° без увеличения габаритных размеров системы приемных электродов. При этом конструктивное выполнение приемных электродов совместно с предварительными усилителями канала регистрации в виде автономных модулейпозволяет существенно повысить помехоустойчивость канала регистрации ионных меток и увеличить разрешающую способность по измеряемому углу и скорости ветра при малых габаритах системы приемных электродов.
Выполнение измерительной схемы формирования выходных сигналов в виде канала определения рабочего сектора измеряемого угла, являющегося каналом грубого отсчета, и канала точного измерения угла в каждом из рабочих секторов, подключенных к вычислительному устройству, позволяет существенно повысить разрешающую способность по измеряемому углу направления вектора скорости ветра во всем диапазоне его изменения без увеличения числа приемных электродов и габаритных размеров системы приемных электродов.
Предложенное выполнение каналов определения рабочего сектора измеряемого угла и канала точного измерения угла внутри каждого рабочего сектора обеспечивает надежное определение рабочего сектора и точное измерение текущего значения угла внутри каждого рабочего сектора, что также позволяет повысить точность измерения в широком диапазоне изменения направления вектора скорости ветра при одновременном изменении величины скорости ветра.
Однако устройство-прототип при установке на фюзеляже вертолета обеспечивает устойчивое измерение параметров вектора скорости ветра только на стоянке до запуска силовой установки. На стоянке при вращении несущего винта, на стартовых и взлетно-посадочных режимах вертолета на его работу оказывают существенное влияние индуктивные потоки вихревой колонны несущего винта, ограничивая возможность измерения параметров вектора скорости ветра на стоянке при вращении несущего винта, при рулении и маневрировании по земной поверхности, при взлете, снижении, висении и посадке вертолета. Это ограничивает применение меточного датчика на вертолетах различного класса и назначения.
Технический результат, на достижение которого направлено заявляемое изобретение, заключается в измерении параметров вектора скорости ветра на стоянке, на стартовых и взлетно-посадочных режимах с помощью расположенного на фюзеляже неподвижного ветроприемного устройства, выполненного на основе панорамного меточного датчика аэродинамического угла и истинной воздушной скорости, в расширении функциональных возможностей и области применения бортовой системы измерения параметров вектора скорости ветра на вертолетах различного класса и назначения.
Технический результат достигается следующим, в бортовой системе измерения параметров вектора скорости ветра на стоянке, стартовых и взлетно-посадочных режимах вертолета, содержащей ветроприемное устройство в виде неподвижного панорамного меточного датчика аэродинамического угла и истинной воздушной скорости с системой приемных электродов, блоком предварительных усилителей, измерительной схемой и вычислительным устройством, неподвижный панорамный меточный датчик аэродинамического угла и истинной воздушной скорости установлен на фюзеляже в зоне действия вихревой колонны несущего винта и воспринимает параметры вектора скорости ветра на стоянке до запуска силовой установки, над системой приемных электродов неподвижного панорамного меточного датчика аэродинамического угла и истинной воздушной скорости установлен (на стойках) неподвижный осесимметричный аэрометрический приемник, например в виде полусферы, ось симметрии которого расположена перпендикулярно системе приемных электродов. На оси симметрии неподвижного осесимметричного, например полусферического аэрометрического приемника расположено отверстие, являющееся приемником полного давления результирующего воздушного потока вихревой колонны несущего винта. В плоскости, параллельной плоскости симметрии вертолета, под одинаковым углом к оси симметрии осесимметричного, например, полусферического аэрометрического приемника расположены отверстия, являющиеся приемниками давлений, определяющих угловое положение вихревой колонны несущего винта относительно плоскости симметрии вертолета. В плоскости, перпендикулярной плоскости симметрии вертолета, под одинаковым углом к оси симметрии осесимметричного, например полусферического аэрометрического приемника под одинаковым углом к его оси симметрии расположены отверстия, являющиеся приемниками давлений, определяющих угловое положение вихревой колонны несущего винта в плоскости симметрии вертолета. Все пневматические выходы неподвижного осесимметричного, например полусферического аэрометрического приемника соединены с входами пневмоэлектрических преобразователей, выходы которых через канал аналого-цифрового преобразования, включающий мультиплексор и аналого-цифровой преобразователи, подключены к входу вычислительного устройства, которое выполнено в виде вычислителя, реализующего как алгоритмы определения параметров вектора скорости ветра на стоянке до запуска силовой установки согласно выражениям (1)-(3), так и на стартовых и взлетно-посадочных режимах вертолета:
- на стоянке до запуска силовой установки;
- при рулении и маневрировании по земной поверхности;
- при взлете, снижении, висении и посадке вертолета.
Сущность изобретения поясняется на фиг. 4 и на фиг. 5.
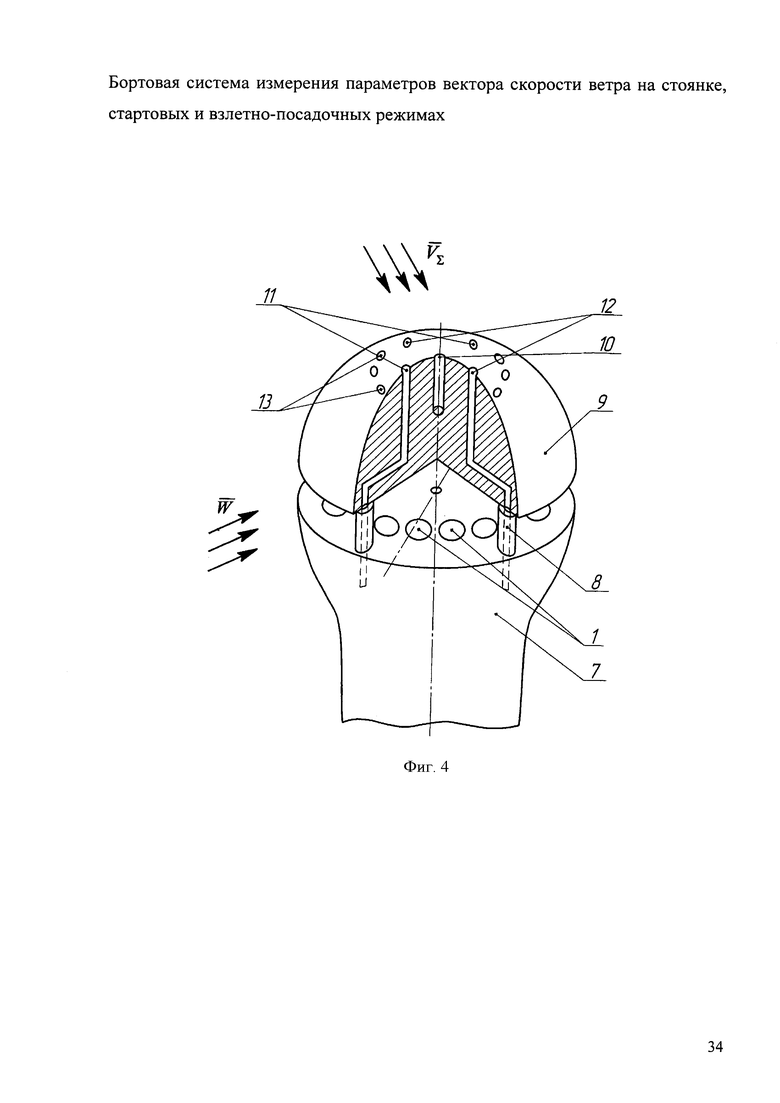
На фиг. 4 приведена конструктивная схема ветроприемного устройства бортовой системы измерения параметров вектора скорости ветра на стоянке, стартовых и взлетно-посадочных режимах вертолета.
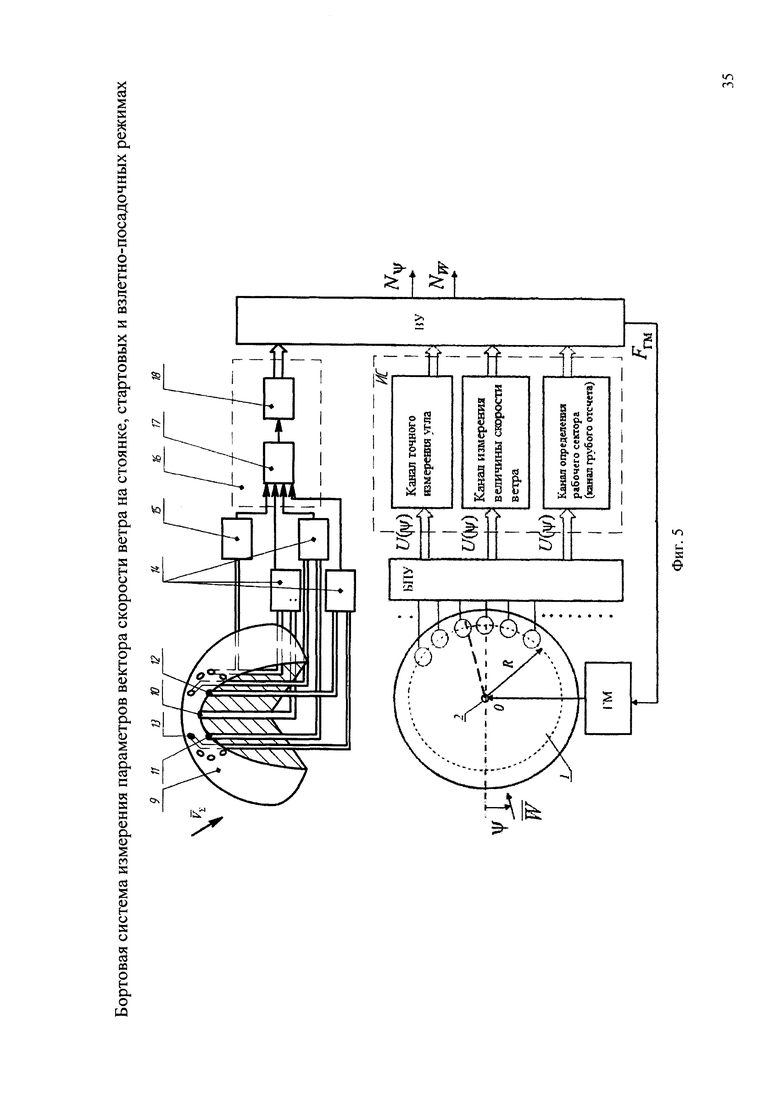
На фиг. 5 приведена структурно-функциональная схема бортовой системы измерения параметров вектора скорости ветра на стоянке, стартовых и взлетно-посадочных режимах вертолета.
Здесь: 1 - система приемных электродов панорамного меточного датчика аэродинамического угла и истинной воздушной скорости; 2 - искровой разрядник; ГМ - генератор ионных меток; БПУ - блок предварительных усилителей; ИС - измерительная схема; ВУ - вычислительное устройство; 7 - панорамный меточный датчик аэродинамического угла и истинной воздушной скорости; 8 - стойки; 9 - осесимметричный, например полусферический аэрометрический, приемник; 10 - отверстие-приемник полного давления вектора скорости 
Конструктивная схема ветроприемного устройства бортовой системы измерения параметров вектора скорости ветра на стоянке, стартовых и взлетно-посадочных режимах вертолета (фиг. 4) содержит панорамный меточный датчик аэродинамического угла и истинной воздушной скорости 7 с системой приемных электродов 1, установленная ось которой параллельна продольной оси вертолета. Перпендикулярно системе приемных электродов 1 на стойках 8 установлен неподвижный осесимметричный, например полусферический аэрометрический приемник 9. На оси симметрии осесимметричного, например полусферического аэрометрического приемника, расположено отверстие 10, являющееся приемником полного давления PПΣ результирующего воздушного потока вихревой колонны несущего винта вертолета. В плоскости, параллельной плоскости симметрии вертолета, под одинаковым углом φ01 к оси симметрии аэрометрического приемника расположены отверстия 11, являющиеся приемниками давлений P1 и P2, определяющих угловое положение вектора скорости 

Функциональная схема бортовой системы измерения параметров вектора скорости ветра на стоянке, стартовых и взлетно-посадочных режимах вертолета приведена на фиг. 5 и содержит неподвижный панорамный меточный датчик аэродинамического угла и истинной воздушной скорости с системой приемных электродов 1, блок предварительных усилителей БПУ, измерительную схему ИС, включающую канал определения рабочего сектора (канал грубого отсчета), канал точного измерения угла и канал измерения воздушной скорости, выходы которых подключены к входу вычислительного устройства ВУ. Позицией 9 на функциональной схеме обозначен установленный над системой приемных электродов 1 неподвижный осесимметричный, например полусферический аэрометрический, приемник 9, на поверхности которого расположены отверстия 10, 11, 12, 13 являющиеся приемниками давлений PПΣ, PCTΣ, P1, P2, P3 и P4. Воспринимаемые давления являются выходами неподвижного осесимметричного, например полусферического аэрометрического приемника и по пневмоканалам подаются на входы пневмоэлектрических преобразователей перепада давлений 14 и пневмоэлектрического преобразователя (датчика) абсолютного давления 15, выходы которых через канал аналого-цифрового преобразования 16, включающий мультиплексор 17 и аналого-цифровой преобразователь 18, подключены к вычислительному устройству ВУ. Вычислительное устройство выполнено в виде вычислителя, реализующего как алгоритмы определения параметров вектора скорости на стоянке до запуска силовой установки по информативным сигналам измерительной схемы неподвижного меточного датчика аэродинамического угла и истинной воздушной скорости, так и на стоянке при запуске силовой установки и вращении несущего винта, на стартовых и взлетно-посадочных режимах вертолета.
Ветроприемное устройство бортовой системы измерения параметров вектора скорости ветра на стоянке, стартовых и взлетно-посадочных режимах вертолета устанавливается на фюзеляже в зоне действия вихревой колонны несущего винта таким образом, чтобы установочная ось неподвижного панорамного меточного датчика аэродинамического угла и истинной воздушной скорости совпадала с направлением продольной оси вертолета.
На стоянке до запуска силовой установки измерение параметров вектора скорости ветра обеспечивается при работе неподвижного панорамного меточного датчика аэродинамического угла и истинной воздушной скорости. Вычислитель, реализуя алгоритмы (1)-(3) определяет угол направления ψ и величину W горизонтального вектора скорости ветра.
При запуске силовой установки и вращении несущего винта в качестве основных информативных параметров при определении величины и угла направления вектора скорости ветра используются параметры вектора скорости
На стоянке при вращении несущего винта вектор скорости


Вектор скорости Vi индуктивного потока несущего винта можно представить в виде стационарной составляющей 



Тогда в качестве информативного параметра вихревой колонны несущего винта можно использовать вектор скорости 



Для конкретного типа вертолета и места установки неподвижного пространственно распределенного комбинированного аэрометрического приемника на фюзеляже вертолета составляющие Vix, Viy, Viz вектора 

где 

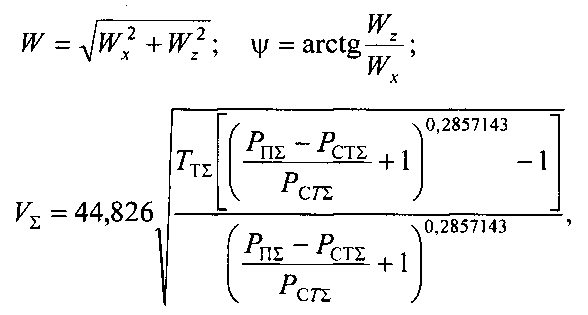
Величину (модуль) вектора скорости 
где параметры, входящие в формулу (7) имеют размерности в единицах системы СИ.
Проекции вектора 

где φ1 и φ2 - углы, определяющие положение вектора скорости
Используя соотношения для определения давления на поверхности полусферического аэрометрического приемника, приведенные в (см. книгу: Петунин А.Н. Методы и техника измерения параметров газового потока (Приемники давления и скоростного напора). - М. Машиностроение.: - 1972. - 332 с. - [11]), углы φ1 и φ2, определяющие положение вектора скорости

где φ10 и φ20 - углы расположения отверстий для забора давлений P1, P2 и P3, P4.
Тогда в соответствии с выражениями (6)-(9) продольная Wx, боковая Wz составляющие и модуль (величина) Wг горизонтального ветра 
Таким образом, по давлениям P1, P2 и P3, P4, PПΣ и PCTΣ, воспринимаемым на поверхности осесимметричного, например полусферического аэрометрического приемника, и температуре TTΣ торможения результирующего воздушного потока вихревой колонны несущего, используя соотношения (10) можно определить параметры вектора скорости ветра на стоянке при запуске силовой установки и вращении несущего винта.
На режиме руления и маневрирования вертолета по земной поверхности в качестве исходного уравнения для определения параметров вектора скорости ветра вместо выражения (5) необходимо использовать соотношение

где 
Тогда, используя соотношения (6)-(11), выражения для определения продольной Wx и боковой Wz составляющих и величина (модуль) Wг горизонтального ветра 
На взлетно-посадочных режимах вертолета в качестве исходного уравнения для определения параметров вектора скорости ветра вместо выражения (5) необходимо использовать соотношения вида

где 


Поскольку неподвижный панорамный меточный датчик аэродинамического угла и истинной воздушной скорости с установленным над его системой приемных электродов осесимметричного, например полусферического приемника расположен на фюзеляже на определенном радиус-векторе 


где 
Проекции вектора скорости
где Vx, Vy, Vz - проекции вектора истинной воздушной скорости VB на оси связанной системы координат.
Составляющие Vx, Vz и величина (модуль) вектора истинной воздушной скорости 

где Р0=101325 Па и T0=288,15 K - абсолютное давление и абсолютная температура воздуха на высоте H=0 стандартной атмосферы; R - удельная газовая постоянная воздуха (R=287,05287 Дж/кг·K); τ - температурный градиент (τ=0,0065 К/м); Kp - безразмерный коэффициент, определяющий связь PCTΣ и PH, который определяется при летных испытаниях для конкретного типа вертолета и места установки на фюзеляже неподвижного панорамного меточного датчика аэродинамического угла и истинной воздушной скорости с установленным на нем осесимметричным, например полусферическим аэрометрическим, приемником; Kiy - безразмерный коэффициент, определяемый аналогично Kix и Kiz.
Используя информацию о величине Vп и угле сноса ψс вектора путевой скорости Vп от доплеровского измерителя скорости и угла сноса и составляющих вектора истинной воздушной скорости 


Таким образом, используя информацию, воспринимаемую неподвижным ветроприемным устройством, выполненным в виде неподвижного панорамного меточного датчика аэродинамического угла и истинной воздушной скорости с установленным над его системой приемных электродов осесимметричным, например полусферическим, приемником, в вычислительном устройстве, выполненном в виде вычислителя, реализующего алгоритмы (7), (10), (12), (16), определяются параметры вектора скорости ветра на стоянке до запуска силовой установки, на стоянке при запуске силовой установки и вращении несущего винта, при рулении и маневрировании по земной поверхности, при взлете, снижении, висении и посадке вертолета. Созданная на его основе бортовая система измерения параметров вектора ветра обладает расширенными функциональными возможностями и областью применения на вертолетах различного класса и назначения.
Применение бортовой системы измерения параметров вектора ветра на вертолетах позволяет повысить безопасность эксплуатации вертолета на стоянке, стартовых и взлетно-посадочных режимах, что имеет существенное значение для авиации.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система воздушных сигналов вертолета | 2018 |
|
RU2695964C1 |
| БОРТОВАЯ СИСТЕМА ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВЕКТОРА СКОРОСТИ ВЕТРА НА СТОЯНКЕ, СТАРТОВЫХ И ВЗЛЕТНО-ПОСАДОЧНЫХ РЕЖИМАХ ВЕРТОЛЕТА | 2014 |
|
RU2592705C2 |
| СПОСОБ ИНТЕЛЛЕКТУАЛЬНОЙ ИНФОРМАЦИОННОЙ ПОДДЕРЖКИ ЭКИПАЖА ВЕРТОЛЕТА ПО ВЫСОТНО-СКОРОСТНЫМ ПАРАМЕТРАМ И ПАРАМЕТРАМ ВОЗДУШНОЙ СРЕДЫ, ОКРУЖАЮЩЕЙ ВЕРТОЛЕТ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2730814C2 |
| СТАРТОВАЯ СИСТЕМА ПРЕДУПРЕЖДЕНИЯ КРИТИЧЕСКИХ РЕЖИМОВ ОДНОВИНТОВОГО ВЕРТОЛЕТА | 2012 |
|
RU2497718C1 |
| СИСТЕМА ВОЗДУШНЫХ СИГНАЛОВ ВЕРТОЛЕТА | 2010 |
|
RU2427844C1 |
| СИСТЕМА ИЗМЕРЕНИЯ МАЛЫХ ВОЗДУШНЫХ СКОРОСТЕЙ ВЕРТОЛЕТА | 2009 |
|
RU2426995C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВОЗДУШНЫХ СИГНАЛОВ ВЕРТОЛЕТА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2307357C1 |
| СИСТЕМА ВОЗДУШНЫХ СИГНАЛОВ ВЕРТОЛЕТА | 2016 |
|
RU2651315C1 |
| Кинематический датчик аэродинамического угла и истинной воздушной скорости | 2019 |
|
RU2737518C1 |
| СИСТЕМА ВОЗДУШНЫХ СИГНАЛОВ ВЕРТОЛЕТА | 2005 |
|
RU2307358C1 |
Бортовая система измерения параметров вектора скорости ветра содержит ветроприемное устройство в виде неподвижного панорамного меточного датчика аэродинамического угла и истинной воздушной скорости с системой приемных электродов, неподвижный осесимметричный полусферический аэрометрический приемник с отверстиями, блок предварительных усилителей, измерительную схему, вычислительное устройство. Обеспечивается безопасность эксплуатации вертолета за счет определения параметров скорости ветра на стоянке, стартовых и взлетно-посадочных режимах вертолета. 5 ил.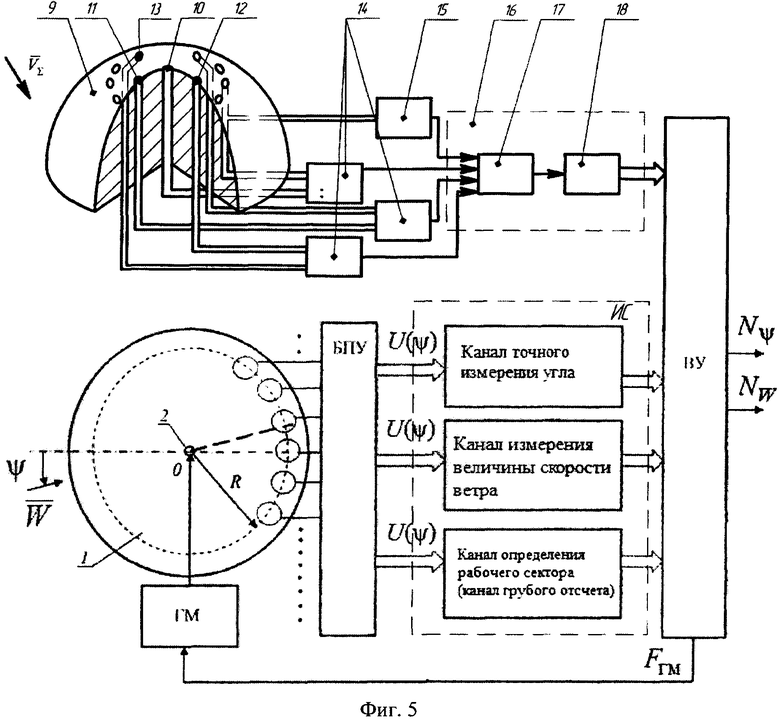
Бортовая система измерения параметров вектора скорости ветра на стоянке, стартовых и взлетно-посадочных режимах вертолета, содержащая ветроприемное устройство в виде неподвижного панорамного меточного датчика аэродинамического угла и истинной воздушной скорости с системой приемных электродов, блоком предварительных усилителей, измерительной схемой и вычислительным устройством, отличающаяся тем, что неподвижный панорамный меточный датчик аэродинамического угла и истинной воздушной скорости установлен на фюзеляже в зоне действия вихревой колонны несущего винта и воспринимает параметры вектора скорости ветра на стоянке до запуска силовой установки, над системой приемных электродов неподвижного панорамного меточного датчика аэродинамического угла и истинной воздушной скорости установлен (на стойках) неподвижный осесимметричный, например полусферический аэрометрический, приемник, ось симметрии которого перпендикулярна системе приемных электродов, на оси симметрии неподвижного осесимметричного, например полусферического аэрометрического, приемника расположено отверстие, являющееся приемником полного давления результирующего воздушного потока вихревой колонны несущего винта, в плоскости, параллельной плоскости симметрии вертолета, под одинаковым углом к оси симметрии осесимметричного, например полусферического аэрометрического, приемника расположены отверстия, являющиеся приемниками давлений, определяющих угловое положение вектора скорости результирующего воздушного потока вихревой колонны несущего винта относительно оси симметрии аэрометрического приемника в плоскости симметрии вертолета, в плоскости, перпендикулярной плоскости симметрии вертолета, под одинаковым углом к оси симметрии осесимметричного, например полусферического аэрометрического, приемника расположены отверстия, являющиеся приемниками давлений, определяющих угловое положение вектора скорости результирующего воздушного потока вихревой колонны несущего винта относительно оси симметрии аэрометрического приемника в плоскости, перпендикулярной плоскости симметрии вертолета, при этом пневматические выходы неподвижного осесимметричного, например полусферического аэрометрического, приемника соединены с входами пневмоэлектрических преобразователей, выходы которых через канал аналого-цифрового преобразования подключены к входу вычислительного устройства, которое выполнено в виде вычислителя, реализующего как алгоритмы определения параметров вектора скорости ветра на стоянке до запуска силовой установки, так и на стоянке при вращении несущего винта, на стартовых и взлетно-посадочных режимах вертолета согласно уравнениям:
1) на режиме стоянки при запуске силовой установки и вращении несущего винта:
где W и ψ - величина (модуль) и направление вектора скорости ветра; R - расстояние от точки генерации ионной метки до окружности с системой приемных электродов; τW - интервал времени пролета ионной метки расстояния R; i - номер рабочего сектора, в котором находится траектория движения ионной метки; α0 - угол, охватывающий рабочий сектор; αi - текущее значение аэродинамического угла в i-м рабочем секторе канала точного измерения угла неподвижного панорамного меточного датчика аэродинамического угла и истинной воздушной скорости.
2) на режиме руления и маневрирования по земной поверхности (стартовые режимы):
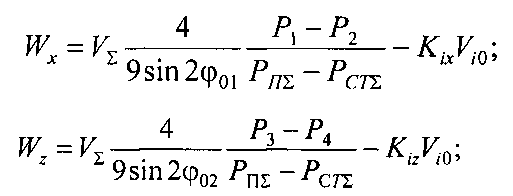
где Р1, Р2, Р3, Р4, РПΣ и PCTΣ - давления, воспринимаемые неподвижным осесимметричным, например полусферическим аэрометрическим, приемником, установленным над системой приемных электродов неподвижного панорамного меточного датчика аэродинамического угла и истинной воздушной скорости; φ01 и φ02 - углы расположения отверстий - приемников давлений Р1, Р2, и Р3, Р4; VΣ и TTΣ - величина (модуль) вектора скорости и температура торможения результирующего воздушного потока вихревой колонны несущего винта; Kix, Kiz - безразмерные коэффициенты, определяемые при летных испытаниях данного типа вертолета; Vi0 - модуль вектора скорости индуктивного потока несущего винта на режиме висения; Wx, Wz - продольная и боковая составляющие вектора скорости ветра.
3) на режиме взлета и набора высоты, снижения, висения и посадки (взлетно-посадочные режимы):

Wx=|Vx|-Vпcosψ; Wz=|Vz|-Vпsinψ; ψ=β+ψc; 
где ωx, ωz - угловые скорости вращения вертолета относительно осей х и z связанной системы координат; PH - абсолютное давление на высоте полета Н; ρΣ - плотность результирующего воздушного потока вихревой колонны несущего винта; Kiy - безразмерный коэффициент, определяемый аналогично Kix и Kiz, Кр - безразмерный коэффициент, определяющий связь PCTΣ и PH, который определяется при летных испытаниях для конкретного типа вертолета и места установки на фюзеляже неподвижного панорамного меточного датчика аэродинамического угла и истинной воздушной скорости с установленным на нем неподвижным осесимметричным, например полусферическим аэрометрическим, приемником; Р0=101325 Па и T0=288,15 К - абсолютное давление и абсолютная температура воздуха на высоте H=0 стандартной атмосферы; R - удельная газовая постоянная воздуха (R=287,05287 Дж/кг·К); τ - температурный градиент (τ=0,0065 К/м); VП и ψc - путевая скорость и угол сноса вертолета от доплеровского измерителя скорости и угла сноса; β - угол скольжения вертолета.
| СИСТЕМА ВОЗДУШНЫХ СИГНАЛОВ ВЕРТОЛЕТА | 2010 |
|
RU2427844C1 |
| Поршневой манометр с неуплотненным поршнем | 1952 |
|
SU99180A1 |
| US 4843880 A1, 04.07.1989 | |||
| US 4920808 A1, 01.05.1990. | |||

