Изобретение относится к области приборостроения, в частности к устройствам для измерения величины (модуля) и угла направления вектора скорости подвижного объекта относительно окружающей воздушной среды и может быть использовано в датчике аэродинамического угла (угла атаки или скольжения) и истинной воздушной скорости летательного аппарата, в частности самолета.
Известны устройства для измерения величины и угла направления вектора скорости газового (воздушного) потока, реализующие аэродинамический метод измерения (Петунин А.Н. Методы и техника измерений параметров газового потока. Приемники давления и скоростного напора). М.: Машиностроение, 1972. 332 с.) - [1]; (Горлин С.М., Слезингер И.И. Аэромеханические измерения. Методы и приборы. М.: Наука, 1964. 636 с.) - [2].
В таких устройствах в контролируемый набегающий воздушный поток вносится приемник давлений, например, в виде сферического или цилиндрического тела, который воспринимает полное и статическое давления набегающего воздушного потока, по которым определяется величина (модуль) вектора скорости набегающего воздушного потока. Этот же приемник воспринимает давления, несущие информацию об угловом положении вектора скорости набегающего воздушного потока относительно оси приемника давлений, по которым определяются угол направления вектора скорости набегающего воздушного потока. Величина угла направления вектора скорости набегающего воздушного потока однозначно определяют аэродинамический угол и истинную воздушную скорость летательного аппарата, а частности самолета.
Применение таких устройств для измерения величины (модуля) и аэродинамического угла (угла атаки или скольжения) вектора воздушной скорости летательного аппарата, в частности самолета, связано с методическими и инструментальными погрешностями восприятия, передачи, преобразования и обработки амплитудных пневматических информативных сигналов (давлений, перепадов давлений, температуры), обусловленных изменением состояния окружающей воздушной среды (плотности, атмосферного давления и температуры, влажности, загрязнению и т.п.), а также с аддитивными и мультипликативными погрешностями амплитудных измерений используемых датчиков давлений, перепадов давлений, температуры, связанных с дрейфом нуля и изменением чувствительности датчиков первичной информации. Возможность засорения, замерзания, попадания пыли и влаги в отверстия приемников для забора статического и полного давлений и давлений, определяющих угол направления набегающего воздушного потока, снижают надежность работы аэрометрического датчика аэродинамического угла и истинной воздушной скорости.
Известно устройство для измерения угла направления и скорости набегающего воздушного потока, построенное на основе вихревого метода, в котором используется эффект образования и периодического срыва вихрей за плохообтекаемыми телами, например клиновидными (Патент РФ на изобретение №2506596, МПК G01P 5/00. Опубл. 10.02.2014. Бюл. №4) - [3].
В таком устройстве, предназначенном для одновременного измерения аэродинамического угла и истинной воздушной скорости, в набегающем воздушном потоке устанавливаются два клиновидных тела своими основаниями встречно набегающему воздушному потоку. При этом основания клиновидных тел имеют одинаковые размеры и расположены ортогонально друг другу. На тыльных поверхностях клиновидных тел расположены каналы регистрации частот вихреобразования за телами, включающие приемники пульсаций давлений на тыльных поверхностях, связанные со схемами регистрации частот, которые измеряют частоты вихреобразования за клиновидными телами. Схемы регистрации частот подключены ко входу вычислителя, на выходе которого формируются значения аэродинамического угла и истинной воздушной скорости в соответствии с разработанными алгоритмами.
Такой вихревой датчик аэродинамического угла и истинной воздушной скорости имеет один неподвижный приемник информации набегающего воздушного потока. В качестве первичных информативных сигналов используются частоты вихреобразования, выделение, преобразование и обработка которых осуществляется с малыми погрешностями. Однако устойчивое вихреобразование за телами, в том числе клиновидными, возникают в ограниченном диапазоне скоростей набегающего воздушного потока и в ограниченном диапазоне угла направления потока, что ограничивает диапазоны измерения аэродинамического угла значением ±20…25°, истинной воздушной скорости - в диапазоне от 50 до 600…800 км/ч.
Известны устройства для измерения аэродинамического угла и истинной воздушной скорости подвижного объекта, реализующие меточный метод измерения, при котором в набегающий воздушный поток вносится метка и с помощью регистраторов контролируется скорость и направление (траекторию) движения метки совместно с потоком (Патент США №2872609, кл 73-180. 1959) - [4]; (Заявка Японии №49 - 622, G01C 17/26, 1972) - [5], (Авторское свидетельство №735065 СССР, G01C 21/12. 1980) - [6].
За прототип взят меточный датчик аэродинамического угла и воздушной скорости (Патент РФ на изобретение №2445634, МПК G01P 5/00, G01P 5/18, G01C 21/12. Опубл. 20.03.2012. Бюл. №8) - [7].
Такое устройство-прототип содержит генератор ионных меток, систему приемных электродов (приемников параметров набегающего воздушного потока), канал регистрации ионных меток, измерительную схему, вычислительное устройство обработки и формирования выходных сигналов. Система приемных электродов выполнена в виде круглых металлических пластин, которые расположены на одинаковом расстоянии по окружности с центром в точке генерации ионной метки и установлены непосредственно под отверстием металлической пластины-маски, закрепленной на диэлектрической плате. Приемные электроды соединены со входами предварительных усилителей канала регистрации ионных меток. Выходы предварительных усилителей через аналоговые ключи (коммутаторы) и сумматоры подключены ко входам дифференциальных усилителей канала регистрации ионных меток.
В меточном датчике аэродинамического угла и истинной воздушной скорости измерительная схема выполнена в виде канала определения рабочего сектора измеряемого угла, являющегося каналом грубого отсчета, канала точного измерения угла и канал измерения воздушной скорости, подключенных ко входу вычислительного устройства, выходы которого являются цифровыми выходами по аэродинамическому углу и истинной воздушной скорости.
В меточном датчике аэродинамического угла и воздушной скорости канал определения рабочего сектора измеряемого угла (канала грубого отсчета) выполнен в виде четырех идентичных каналов, соответствующих одному из четырех рабочих секторов диапазона измерения аэродинамического угла, каждый из которых включает в себя два сумматора, на вход первого из которых подключены выходы нечетных модулей предварительных усилителей данного рабочего сектора, а на вход второго сумматора подключены выходы четных модулей предварительных усилителей данного рабочего сектора измеряемого угла, при этом выходы сумматоров каждого из четырех идентичных каналов подключены ко выходам дифференциальных усилителей, выходы которых через коммутаторы подключены ко входу вычислительного устройства.
В меточном датчике аэродинамического угла и воздушной скорости канал точного измерения угла выполнен в виде двух идентичных параллельных каналов преобразования, первый из которых подключен к выходам четных модулей предварительных усилителей этого канала, формирующих информативный сигнал, величина которого имеет синусоидальную зависимость от измеряемого угла, а второй канал преобразования подключен к выходам нечетных модулей предварительных усилителей, формирующих информативный сигнал, величина которого имеет косинусоидальную зависимость от измеряемого угла, при этом канал преобразования, формирующий синусоидальную зависимость от измеряемого угла включает два сумматора, входы первого из них подключены к выходам четных модулей предварительных усилителей, формирующих синусоидальную зависимость от измеряемого угла со знаком плюс, а входы второго сумматора подключены к выходам четных модулей предварительных усилителей, формирующих синусоидальную зависимость от измеряемого угла со знаком минус, а канал преобразования, формирующий косинусоидальную зависимость от измеряемого угла, включает два сумматора, входы первого из них подключены к выходам нечетных модулей предварительных усилителей, формирующих косинусоидальную зависимость от измеряемого угла со знаком плюс, а входы второго сумматора подключены к выходам нечетных модулей предварительных усилителей, формирующих косинусоидальную зависимость от измеряемого угла со знаком минус, причем выходы сумматоров каждого из идентичных параллельных каналов преобразования подключены ко входам дифференциальных усилителей, выходы которых подключены ко входам программируемых усилителей, управляющие входы которых подключены к вычислительному устройству, а выходы программируемых усилителей через интеграторы и аналого-цифровые преобразователи подключены ко входу вычислительного устройства, который также управляет запуском аналого-цифровых преобразователей, причем выходы программируемых усилителей через компараторы соединены с вычислительным устройством.
В меточном датчике аэродинамического угла и воздушной скорости сигнал, поступающий от вычислительного устройства на управляющий вход программируемых усилителей канала точного измерения угла, формируется вычислительным устройством по сигналам, поступающим с выходов аналого-цифровых преобразователей двух идентичных параллельных каналов преобразования, в соответствии с алгоритмом
(Asinα)2+(Acosα)2=A2(sin2α+cos2α)=A2,
где А - величина (амплитуда) выходных сигналов предварительных усилителей, формирующих синусоидальную и косинусоидальную зависимости от измеряемого угла α.
В меточном датчике аэродинамического угла и воздушной скорости канал измерения воздушной скорости выполнен в виде двух компараторов, входы которых подключены к выходам программируемых усилителей канала точного измерения аэродинамического угла, а выходы, являющиеся выходом по времени пролета ионной метки расстояния от точки генерации ионной метки до окружности с приемными электродами, подключены к вычислительному устройству.
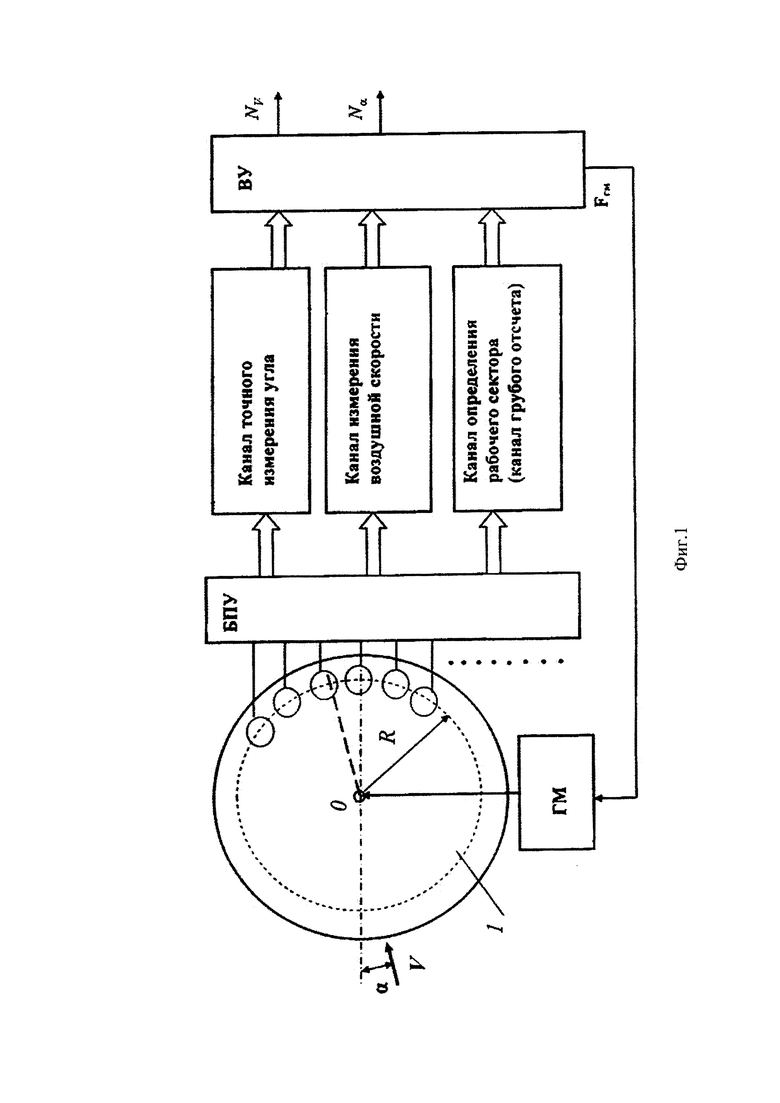
На фиг. 1 приведена функциональная схема меточного датчика аэродинамического угла и воздушной скорости. На фиг. 2 показана конструктивная схема системы приемных электродов. На фиг. 3 показан принцип формирования синусоидального и косинусоидального информативных сигналов с помощью дискретных приемных электродов. На фиг. 4 приведена структурно-функциональная схема канала определения рабочего сектора измеряемого аэродинамического угла (канала грубого отсчета). На фиг. 5 приведена структурно-функциональная схема канала точного измерения аэродинамического угла и канала воздушной скорости.
Функциональная схема меточного датчика аэродинамического угла и воздушной скорости (фиг. 1) содержит плату 1 с системой приемных электродов ПЭ в виде круглых металлических пластин, расположенных на одинаковом расстоянии по окружности радиусом R с центром в точке 0 генерации ионной метки. Приемные электроды соединены со входами предварительных усилителей ПУ канала регистрации ионных меток, расположенных в блоке предварительных усилителей БПУ. Приемные электроды выполнены совместно с предварительными усилителями в виде автономных модулей, имеющих экранирующий корпус, расположенных в БПУ. Выходы блока предварительных усилителей подключены ко входу канала точного измерения угла (канал точного измерения аэродинамического угла), ко входу канала измерения воздушной скорости и ко входу определения рабочего сектора измеряемого аэродинамического угла (канал грубого отсчета). Выходы всех указанных каналов подключены ко входу вычислительного устройства ВУ, выходы которого являются цифровыми кодами по аэродинамическому углу Nα и по воздушной скорости NV.
На выходе вычислительного устройства ВУ также формируется выходной сигнал Fгм, который является управляющим входом генератора меток ГМ и задает частоту генерации ионных меток и начало цикла измерения аэродинамического угла и воздушной скорости.
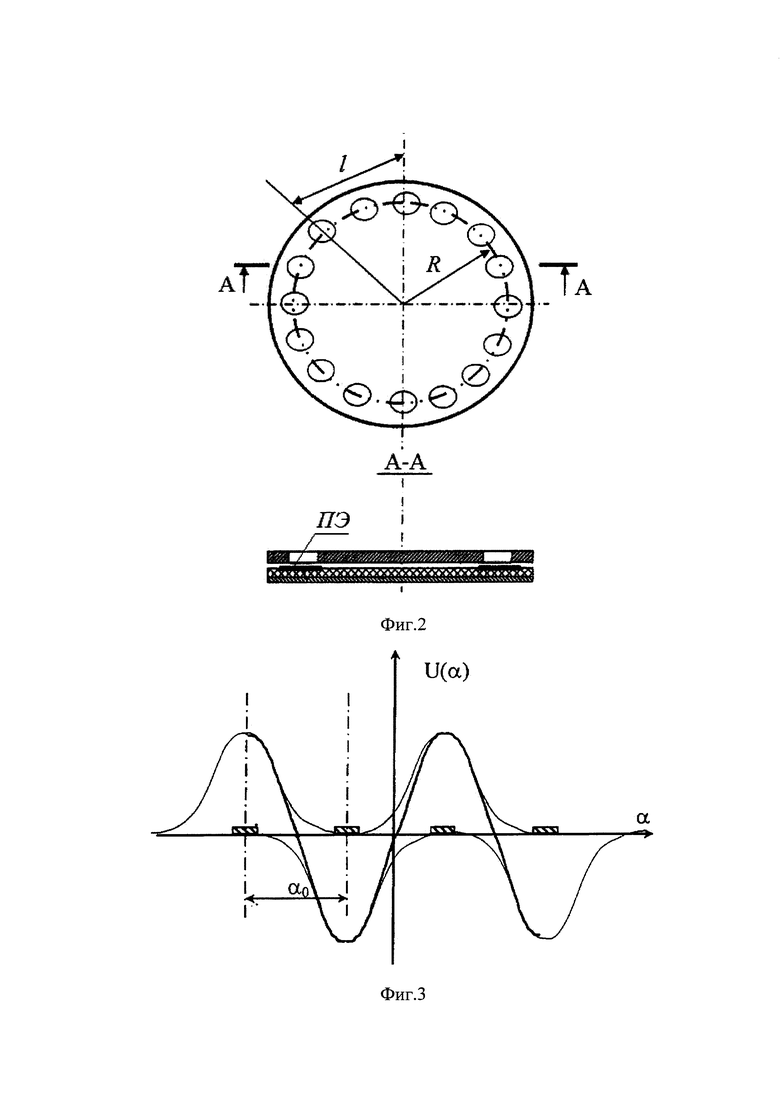
Конструктивно систему приемных электродов с точки зрения технологической воспроизводимости целесообразно выполнить на основе металлической маски (фиг. 2). Маска представляет собой тонкую металлическую пластину, на которой имеются отверстия, расположенные на одинаковом расстоянии l по окружности радиусом R. Под маской находится диэлектрическая плата с приемными электродами ПЭ, которые располагаются непосредственно под отверстиями металлической маски.
Данная конструкция системы приемных электродов является достаточно простой для реализации и позволяет обеспечить высокую точность формирования синусоидальных и косинусоидальных угловых характеристик информативных сигналов приемных электродов (фиг. 3). Форма угловой характеристики многоэлементной электродной системы определяется формой характеристики отдельного дискретного приемного электрода, взаимным расположением электродов и схемой подключения их к предварительным усилителям канала регистрации ионных меток (фиг. 3).
Задачей синтеза угловой характеристики приемных электродов является нахождение конструктивных параметров маски, обеспечивающих формирование синусоидальных и косинусоидальных угловых характеристик.
Предлагаемый меточный датчик аэродинамического угла и воздушной скорости включает два канала измерения аэродинамического угла - канал определения номера i рабочего сектора α0 измеряемого угла, являющийся каналом грубого отсчета, и канал точного измерения угла α0 в пределах i рабочего сектора.
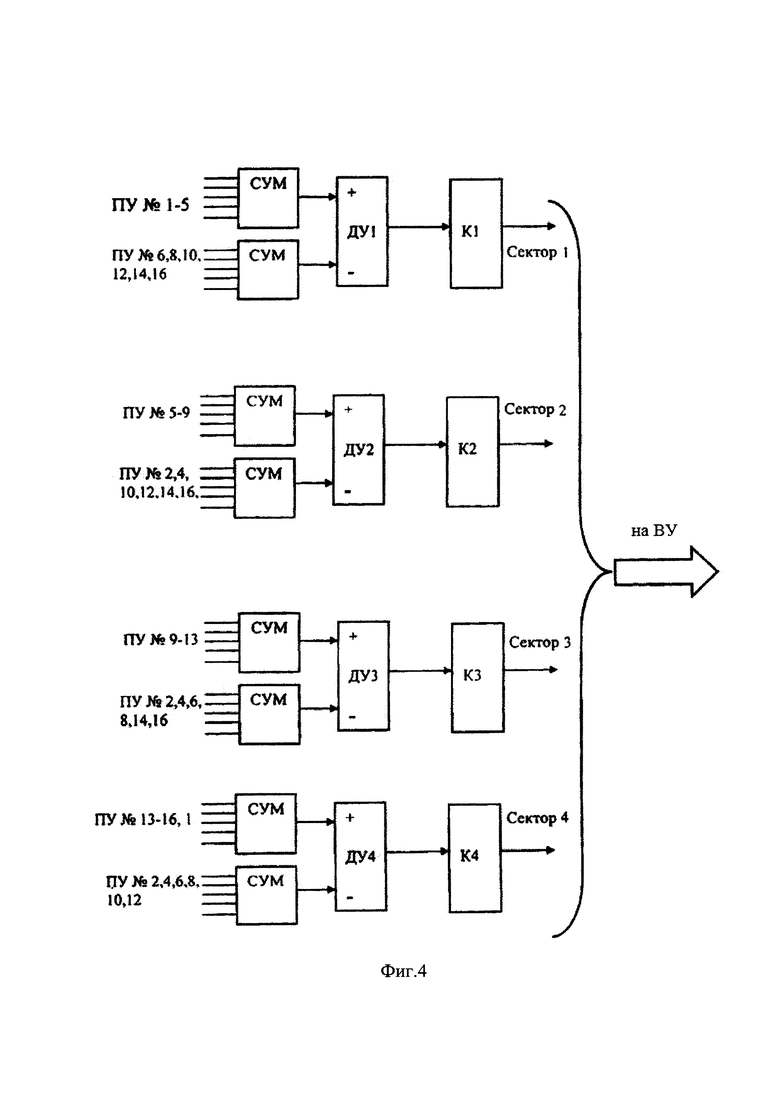
Канал определения рабочего сектора измеряемого угла (канал грубого отсчета) (фиг. 4) выполнен в виде четырех идентичных каналов, соответствующих одному из четырех рабочих секторов диапазона изменения измеряемого аэродинамического угла, каждый i-ый идентичный канал включает в себя два сумматора СУМ, входы которых подключены к выходам предварительных усилителей ПУ своего сектора (например, к выходам предварительных усилителей ПУ с номерами №, указанными на фиг. 4), выходы сумматоров СУМ подключены ко входу дифференциального усилителя ДУi, выход которого соединен со входом компаратора Ki, выход которого является выходом i-го рабочего сектора и свидетельствует о попадании (или отсутствии) траектории движения ионной метки в i-ый рабочий сектор и подключен к вычислительному устройству ВУ.
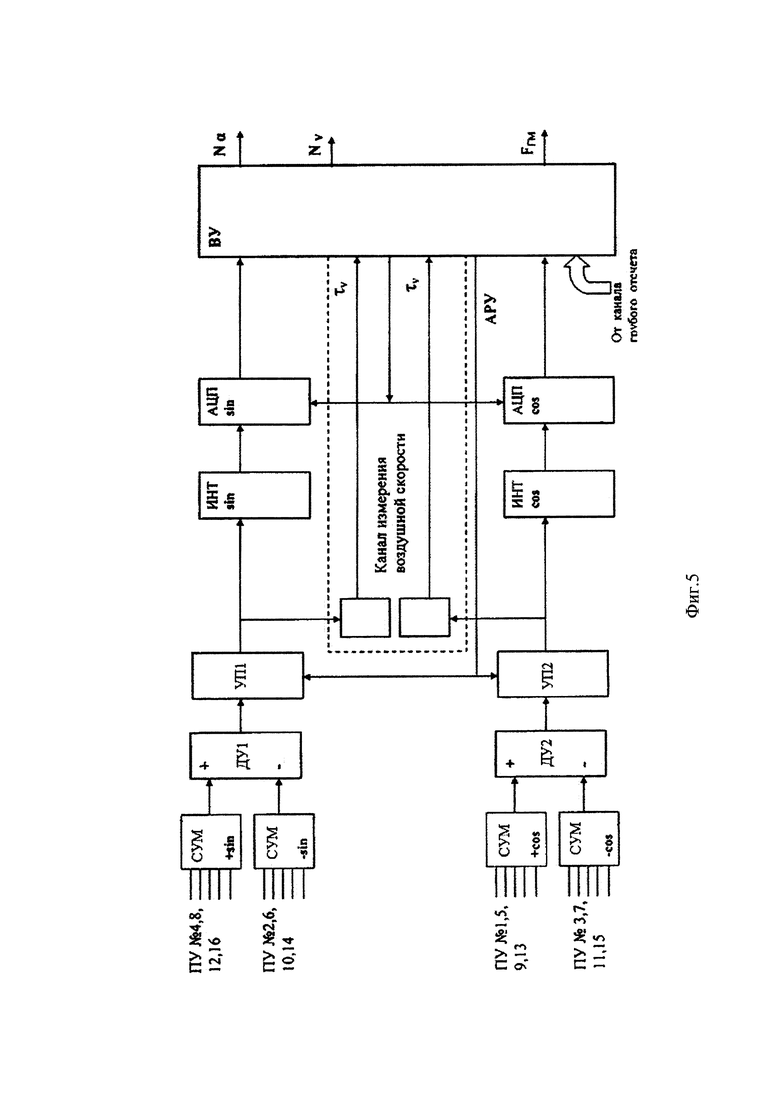
Канал точного измерения аэродинамического угла (фиг. 5) выполнен в виде двух идентичных параллельных каналов преобразования, первый из которых подключен к выходам четных модулей предварительных усилителей ПУ (например, к выходам предварительных усилителей ПУ с номерами, указанными на фиг. 5), формирующих информативный сигнал, величина которого имеет синусоидальную зависимость от измеряемого угла, а второй параллельный канал преобразования подключен к выходам нечетных модулей предварительных усилителей ПУ (например, к выходам предварительных усилителей ПУ с номерами №, указанными на фиг. 5), формирующих информативный сигнал, величина которого имеет косинусоидальную зависимость от измеряемого угла.
Канал преобразования, формирующий синусоидальную зависимость от измеряемого угла, включает два сумматора СУМ. Входы первого из них СУМ +sin подключены к выходам четных модулей предварительных усилителей ПУ, формирующих синусоидальную зависимость от измеряемого угла со знаком плюс (+sin) (например, к выходам предварительных усилителей ПУ с номерами №, указанными на фиг. 5). Входы второго сумматора СУМ -sin подключены к выходам четных модулей предварительных усилителей ПУ, формирующих синусоидальную зависимость от измеряемого угла со знаком минус (-sin) (например, к выходам предварительных усилителей ПУ с номерами №, показанными на фиг. 5).
Второй параллельный канал преобразования, формирующий косинусоидальную зависимость от измеряемого угла, включает два сумматора СУМ. Входы первого из них СУМ +cos подключены к выходам нечетных модулей предварительных усилителей ПУ, формирующих косинусоидальную зависимость от измеряемого угла со знаком плюс (+cos) (например, к выходам предварительных усилителей ПУ с номерами №, показанными на фиг. 5). Входы второго сумматора СУМ -cos подключены к выходам нечетных модулей предварительных усилителей ПУ, формирующих косинусоидальную зависимость от измеряемого угла со знаком минус (-cos) (например, к выходам предварительных усилителей ПУ с номерами №, показанными на фиг. 5).
Выходы сумматоров СУМ каждого из параллельных каналов преобразования подключены ко входам дифференциальных усилителей ДУ1 и ДУ2, выходы которых подключены ко входам программируемых усилителей УП1 и УП2, управляющие входы которых подключены к выходу АРУ (автоматическое регулирование усиления) вычислительного устройства ВУ. Выходы программируемых усилителей через интеграторы ИHTsin и ИHTcos и аналого-цифровые преобразователи АЦПsin и AЦПcos подключены ко входу вычислительного устройства ВУ, который также управляет запуском аналого-цифровых преобразователей АЦПsin и AЦПcos.
Сигнал АРУ (автоматическое регулирование усиления), поступающий от вычислительного устройства ВУ на управляющие входы программируемых усилителей УП1 и УП2 канала точного измерения аэродинамического угла, формируется вычислительным устройством ВУ по сигналам, поступающим с выходов аналого-цифровых преобразователей АЦПsin и AЦПcos идентичных параллельных каналов преобразования в соответствии с алгоритмом
(Asinα)2+(Acosα)2=A2(sin2α+cos2α)=A2,
где A - величина (амплитуда) выходных сигналов предварительных усилителей, формирующих синусоидальную и косинусоидальную зависимости от измеряемого угла а.
Канал измерения воздушной скорости (фиг. 5) выполнен в виде двух компараторов К1 и К2, входы которых подключены к выходам программируемых усилителей УП1 и УП2 канала точного измерения аэродинамического угла, выходы компараторов К1 и К2, являющиеся выходом по времени τх пролета ионной меткой расстояния R от точки генерации ионной метки до окружности с приемными электродами (фиг. 1), подключены к вычислительному устройству ВУ, выход которого NV пропорционален воздушной скорости 
Меточный датчик аэродинамического угла и воздушной скорости работает следующим образом.
Меточный датчик аэродинамических углов и воздушной скорости устанавливается на летательном аппарате таким образом, чтобы плата 1 с системой приемных электродов ПЭ (фиг. 1) находилась в плоскости изменения аэродинамического угла α вектора  воздушной скорости. Цикл измерения начинается с подачи с выхода вычислительного устройства ВУ сигнала Fгм. В соответствии с сигналом Fгм генератор метки ГМ выдает импульс высоковольтного напряжения на разрядник, установленный в точке 0 генерации ионной метки. За счет искрового разряда разрядника в точке 0 образуется ионизированная область - ионная метка с явно выраженным электростатическим зарядом qм. Заряженная ионная метка перемещается совместно с набегающим воздушным потоком и приобретает его параметры движения - скорость V и направление α относительно оси симметрии системы приемных электродов ПЭ. При перемещении ионной метки совместно с набегающим воздушным потоком заряженная ионная метка пролетает вблизи приемных электродов и наводит (индуцирует) на них электрические заряды, величина которых зависит от расстояния ионной метки от приемного электрода и углового положения а траектории движения ионной метки.
воздушной скорости. Цикл измерения начинается с подачи с выхода вычислительного устройства ВУ сигнала Fгм. В соответствии с сигналом Fгм генератор метки ГМ выдает импульс высоковольтного напряжения на разрядник, установленный в точке 0 генерации ионной метки. За счет искрового разряда разрядника в точке 0 образуется ионизированная область - ионная метка с явно выраженным электростатическим зарядом qм. Заряженная ионная метка перемещается совместно с набегающим воздушным потоком и приобретает его параметры движения - скорость V и направление α относительно оси симметрии системы приемных электродов ПЭ. При перемещении ионной метки совместно с набегающим воздушным потоком заряженная ионная метка пролетает вблизи приемных электродов и наводит (индуцирует) на них электрические заряды, величина которых зависит от расстояния ионной метки от приемного электрода и углового положения а траектории движения ионной метки.
За счет выбора конструктивных параметров системы приемных электродов (фиг. 2) с помощью четных приемных электродов, например №№4, 8, 12, 16, формируются положительные полуволны (+sinα) синусоидальных угловых характеристик информативных сигналов U(α) (фиг. 3) на выходе четных предварительных усилителей, например, ПУ №№4, 8, 12, 16 (фиг. 5). С помощью четных приемных электродов, например, №№2, 6, 10, 14, формируются отрицательные полуволны (-sinα) синусоидальных угловых характеристик информативных сигналов U(α) (фиг. 3) на выходе четных предварительных усилителей, например, ПУ №№2, 6, 10, 14 (фиг. 5).
С помощью нечетных приемных электродов, например, №№1, 5, 9, 13, формируются положительные полуволны (+cosα) косинусоидальных угловых характеристик информативных сигналов U(α) на выходе нечетных предварительных усилителей, например, ПУ №№1, 5, 9, 13 (фиг. 5). С помощью нечетных приемных электродов, например, №№3, 7, 11, 15, формируются отрицательные полуволны (-cosα) косинусоидальных угловых характеристик информативных сигналов U(α) на выходе нечетных предварительных усилителей, например, ПУ №№3, 7, 11, 15 (фиг. 5).
Выходные сигналы предварительных усилителей ПУ блока предварительных усилителей БПУ (фиг. 1) подаются на входы канала определения рабочего сектора (канал грубого отсчета) измеряемого аэродинамического угла, канал точного измерения аэродинамического угла и канал измерения воздушной скорости. Выходные сигналы указанных каналов подаются на входы вычислительного устройства ВУ, который по результатам обработки входной информации выдает цифровые коды Nα, NV по измеряемому аэродинамическому углу α и воздушной скорости VB.
При работе канала определения рабочего сектора измеряемого аэродинамического угла (фиг. 5) выходные сигналы предварительных усилителей ПУ подаются на четыре идентичных канала, соответствующих одному из четырех рабочих секторов диапазона изменения измеряемого аэродинамического угла. Каждый i-ый из четырех идентичных каналов включает в себя сумматоры СУМ, дифференциальные усилители ДУ и компараторы К. На входы сумматоров, подключенных к неинвертирующему (положительному) входу каждого i-го дифференциального усилителя ДУi подаются сигналы от предварительных усилителей ПУ, подключенных к приемным электродам, расположенным в пределах i-го рабочего сектора диапазона измерения аэродинамического угла. Остальные приемные электроды подключены к предварительным усилителям, выходы которых подаются на вход сумматора, выходные сигналы которого подключены к инвентирующему (отрицательному) входу дифференциального усилителя ДУi.
При движении ионной метки в пределах i-го рабочего сектора выходной сигнал i-го дифференциального усилителя ДУi будет положительным в пределах всего рабочего сектора. При выходе траектории движения ионной метки за пределы i-го рабочего сектора выходной сигнал i-го дифференциального усилителя ДУi изменяет знак на противоположный. Следовательно, положительный знак на выходе дифференциального усилителя ДУi свидетельствует о попадании траектории движения ионной метки в i-ый рабочий сектор.
При положительном знаке выходного сигнала дифференциального усилителя ДУi происходит срабатывание компаратора Ki, на выходе которого формируется сигнал (признак) попадания траектории ионной метки в сектор i, который подается на вход и фиксируется вычислительным устройством.
При выходе траектории движения ионной метки за пределы i-го рабочего сектора, она попадает в другой, например в (i+1) сектор, что приведет к пропаданию сигнала (признака) i-го рабочего сектора и появлению сигнала (признака) (i+1)-го рабочего сектора.
При работе точного канала измерения аэродинамического угла реализуется интерполяционный метод преобразования и обработки информативных сигналов U(α), формируемых на выходе предварительных усилителей блока предварительных усилителей БПУ (фиг. 1).
Выходные сигналы четных предварительных усилителей ПУ №№4, 8, 12, 16 (фиг. 5), формирующих положительную полуволну (+sinα) информативного сигнала U(α), и выходные сигналы четных предварительных усилителей ПУ №№2, 6, 10, 14, формирующих отрицательную полуволну (-sinα) информативного сигнала U(α), подаются на входы сумматоров СУМ+sin и СУМ-sin, выходы которых подаются на вход дифференциального усилителя ДУ1, на выходе которого формируются обе полуволны синусоидальной зависимости угловой характеристики i-го рабочего сектора диапазона измерения измеряемого аэродинамического угла, который поступает на вход программируемого усилителя УП1, в котором нормируется по амплитуде с помощью сигнала управления АРУ, поступающего от вычислительного устройства. Пронормированный по амплитуде сигнал Asinα через интегратор ИHTsin, выполняющий функции фильтра нижних частот, очищается от пульсационных помех и подается на вход аналого-цифрового преобразователя AЦПsin, выходной сигнал в виде цифрового кода Nsinα, пропорционального Asinα, подается на вычислительное устройство ВУ.
По другому идентичному параллельному каналу преобразования (фиг. 5) с помощью сумматоров СУМ+cos и СУМ-cos, подключенных к выходам нечетных предварительных усилителей ПУ №№1, 5, 9, 13 и ПУ №№3,7, 11, 15 и дифференциального усилителя ДУ2, программируемого усилителя УП2, интегратора ИHTcos и аналого-цифрового преобразователя AЦПcos формируется цифровой код Ncosα, пропорциональный Acosα, который подается на вычислительное устройство.
Цифровые сигналы, пропорциональные Asinα и Acosα, обрабатываются в вычислительном устройстве, на выходе которого выдается цифровой код Nαт, связанный значением αр измеряемого аэродинамического угла точного канала соотношением 
С учетом попадания траектории ионной метки в i-ый грубый канал текущее значение измеряемого аэродинамического угла определяется как
α=iαo+αр,
где αo - угол, охватывающий рабочий сектор грубого канала отсчета (при i=4, αo=90°); i - номер рабочего сектора (i=1,4).
При работе канала измерения воздушной скорости (фиг. 5) используются выходные сигналы программируемых усилителей УП1 и УП2 канала точного измерения аэродинамического угла, которые подаются на входы компараторов К1 и К2, порог срабатывания которых настроен на значение нормируемой амплитуды А синусоидальных и косинусоидальных угловых характеристик Asinα и Acosα. При достижении уровня А выходных сигналов программируемых усилителей УП1 и УП2, что соответствует моменту времени τх пролета ионной меткой расстояния R от точки генерации ионной метки до окружности с приемными электродами, происходит срабатывание компараторов К1 и К2 и формирование интервала времени τV вычислительном устройстве ВУ. В соответствии с интервалом времени τV в вычислительном устройстве вырабатывается цифровой код NV, пропорциональный величине воздушной скорости 
Цифровые коды Nα и NV подаются на средства отображения информации к другим потребителям.
Однако устройство-прототип, меточный датчик аэродинамического угла и воздушной скорости, имеет ряд недостатков, связанных с большим числом приемных электродов и сложностью измерительной схемы, осуществляющих регистрацию траектории и скорости движения ионной метки, формируемой генератором и искровым разрядником, выделение и преобразование электрических зарядов, наводимых ионной меткой на регистрирующих электродах, а также со сложными алгоритмами и программным обеспечением вычислительного устройства, осуществляющего обработку информации и формирование выходных цифровых сигналов по аэродинамическому углу и истинной воздушной скорости. Кроме того, многоканальная измерительная схема, осуществляющая регистрацию, преобразование и предварительную обработку амплитудных измерительных сигналов обусловливает жесткие требования к идентичности и стабильности измерительных каналов, являются причиной аддитивных и мультипликативных погрешностей измерения. Их снижение приводит к необходимости тщательного подбора элементов измерительных каналов, введения корректирующих звеньев, что усложняет производство и увеличивает стоимость датчика. Все это сдерживает широкое применение меточного датчика аэродинамического угла и истинной воздушной скорости на самолетах и других летательных аппаратах.
Технический результат, на достижение которого направлено заявляемое изобретение, заключается в упрощении конструкции, снижении стоимости и повышении точности измерения за счет существенного сокращения числа приемников для регистрации параметров набегающего воздушного потока, уменьшения числа измерительных каналов и упрощения измерительной схемы и вычислительного устройства обработки информации и формирования выходных сигналов и, как следствие, обеспечение конкурентоспособности применения на летательных аппаратах, в том числе на самолетах различного класса и назначения кинематического датчика аэродинамического угла и истинной воздушной скорости, реализующего кинематический метод измерения, в котором для измерения кинематических параметров движения летательного аппарата (аэродинамического угла и истинной воздушной скорости) контролируются и определяются непосредственно кинематические параметры набегающего воздушного потока.
Технический результат достигается следующим.
В кинематическом датчике аэродинамического угла и истинной воздушной скорости, содержащем плату с приемниками, регистрирующими параметры набегающего воздушного потока, измерительную схему, устройство обработки и формирования выходных сигналов, новым является то, что приемники выполнены в виде двух совмещенных пар пьезоэлектрических излучателей-приемников ультразвуковых колебаний по направлению набегающего воздушного потока и против него, установленных ортогонально друг к другу под углом Θ0=45° к оси платы, относительно которой отсчитывается значение измеряемого аэродинамического угла, при этом выходы пьезоэлектрических излучателей через элементы измерительной схемы - модуляторы подключены к генератору синусоидальных колебаний высокой частоты, а пьезоэлектрические приемники - через усилители и детекторы измерительной схемы подключены ко входам двух схем вычитания частот, на выходе которых формируются разности частот пар приемников, воспринимающих ультразвуковые колебания в противоположных направлениях, выходы схем вычитания подключены ко входу устройства обработки и формирования выходных сигналов, выполненного в виде вычислителя, выходы которого являются цифровыми выходами по аэродинамическому углу α и истинной воздушной скорости VB, определяемые в соответствии с алгоритмами

где L - расстояние между пьезоэлектрическими излучателями и приемниками ультразвуковых колебаний;  и
и 
 - частоты ультразвуковых колебаний, воспринимаемые парами приемников в противоположных направлениях.
- частоты ультразвуковых колебаний, воспринимаемые парами приемников в противоположных направлениях.
Сущность изобретения поясняется на фиг. 6.
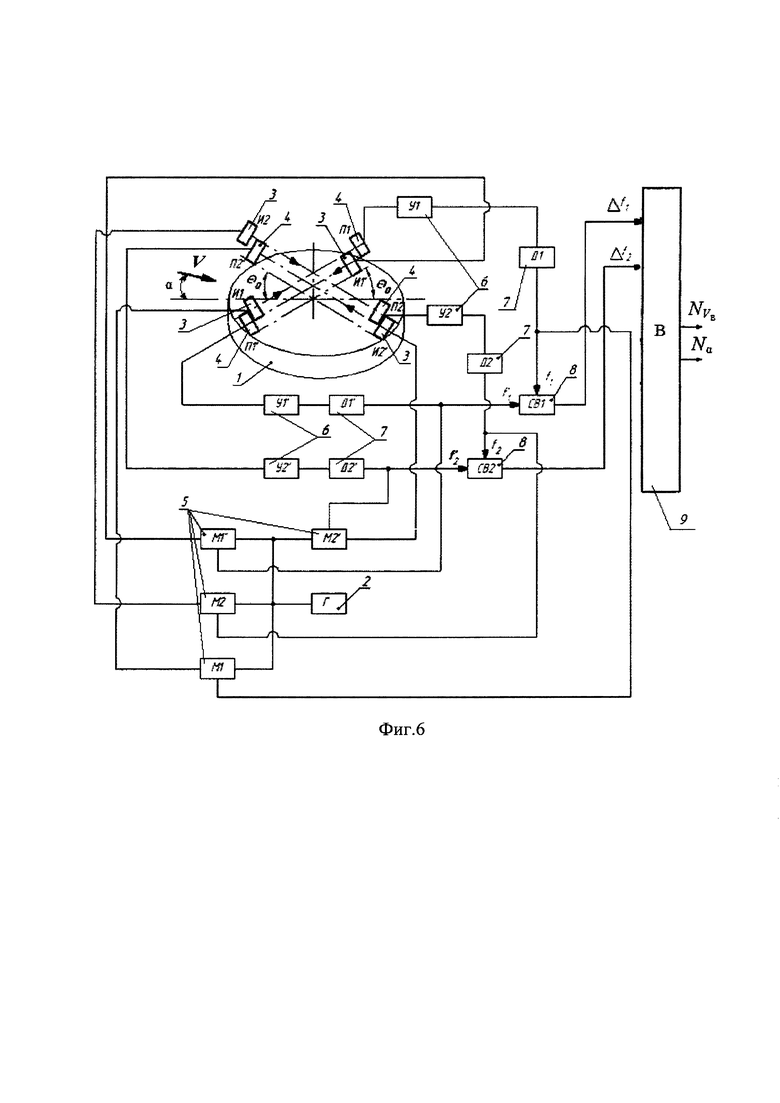
На фиг. 6 приведена функциональная схема кинематического датчика аэродинамического угла и истинной воздушной скорости.
Здесь 1 - плата с приемниками, регистрирующими параметры набегающего воздушного потока; 2 - генератор синусоидальных колебаний высокой частоты; 3 и 4 - две пары совмещенных пьезоэлектрических излучателей-приемников ультразвуковых колебаний И1-П1, И1'-П1' и И2-П2, И2'-П2'; 5 - модуляторы; 6 - усилители; 7 - детекторы; 8 - схемы вычитания частот; 9 - вычислитель.
Функциональная схема кинематического датчика аэродинамического угла и истинной воздушной скорости (фиг. 6) содержит плату с элементами регистрации параметров набегающего воздушного потока 1. На внешней поверхности платы обтекаемой набегающим воздушным потоком, установлены две совмещенные пары пьезоэлектрических излучателей-приемников 3 и 4 ультразвуковых колебаний, установленных ортогонально друг к другу под углом Θ0=45° к оси платы 1, относительно которой отсчитывается значение аэродинамического угла. Излучатели И1 и И2 обеспечивают излучение ультразвуковых колебаний по направлению набегающего воздушного потока, а излучатели И1' и И2' - против направления потока. Приемники П1 и П2 воспринимают ультразвуковые колебания, распространяющиеся по направлению набегающего воздушного потока, а приемники П1' и П2' - против направления потока.
Выходы пьезоэлектрических излучателей И1, И2 и И1' и И2', через установленные на стойках на внутренней стороне платы 1, элементы измерительной схемы - модуляторы M1, М2 и M1' и М2' подключены к генератору 2 (Г) синусоидальных колебаний высокой частоты и к выходам детекторов Д1, Д2 и Д1' и Д2'. Пьезоэлектрические приемники П1 и П1' через усилители У1 и У1', детекторы Д1 и Д1' подключены к схеме вычитания частот СВ1, на выходе которой формируется разность  частот ƒ1 и
частот ƒ1 и  ультразвуковых колебаний, воспринимаемые приемниками П1 и П1' по направлению набегающего воздушного потока. Аналогично пьезоэлектрические приемники П2 и П2' через усилители У2 и У2', детекторы Д2 и Д2' подключены к схеме вычитания частот СВ2, на выходе которой формируется разность
ультразвуковых колебаний, воспринимаемые приемниками П1 и П1' по направлению набегающего воздушного потока. Аналогично пьезоэлектрические приемники П2 и П2' через усилители У2 и У2', детекторы Д2 и Д2' подключены к схеме вычитания частот СВ2, на выходе которой формируется разность  частот ƒ2 и
частот ƒ2 и  ультразвуковых колебаний, воспринимаемые приемниками П2 и П2' против направления набегающего воздушного потока.
ультразвуковых колебаний, воспринимаемые приемниками П2 и П2' против направления набегающего воздушного потока.
Выходы схем вычитания частот СВ1 и СВ2 подключены ко входу вычислителя, осуществляющего обработку сигналов Δƒ1 и Δƒ2 определение аэродинамического угла α и истинной воздушной скорости VB, в соответствии с алгоритмами

где L - расстояние между пьезоэлектрическими излучателями и приемниками ультразвуковых колебаний. На выходе вычислителя 9 формируются цифровые (кодовые) выходные сигналы Nα и  кинематического датчика аэродинамического угла и истинной воздушной скорости.
кинематического датчика аэродинамического угла и истинной воздушной скорости.
Кинематический датчик аэродинамического угла и истинной воздушной скорости устанавливается на летательном аппарате, в частности, на самолете таким образом, чтобы ось платы 1 с приемниками, регистрирующими вектор скорости V набегающего воздушного потока, была параллельна продольной оси летательного аппарата (самолета), а обтекаемая поверхность платы находилась в плоскости изменения измеряемого аэродинамического угла α. При необходимости, за счет установочного угла, изменяющего положение оси платы 1 относительно продольной оси летательного аппарата, можно изменять верхнюю и нижнюю границы диапазона измерения аэродинамического угла.
При работе кинематического датчика аэродинамического угла и истинной воздушной скорости генератор 2 создает синусоидальные колебания высокой частоты, которые через модуляторы 5 поступают на пьезоэлементы излучателей 3. Излучатели 3 посылают ультразвуковые колебания пьезоэлектрическим приемникам 4 под углом Θ0 к направлению вектора скорости V набегающего воздушного потока, а излучатели И1' и И2' - против направления набегающего воздушного потока.
Работа измерительных каналов кинематического датчика аэродинамического угла и истинной воздушной скорости основана на различии времени прохождения ультразвуковых колебаний от излучателей до приемников по направлению набегающего воздушного потока и против направления потока.
Применительно к совмещенным парам излучатели-приемники И1-П1, И1'-П1' и И2-П2, И2'-П2' интервалы времени t1,  и t2,
и t2,  прохождения ультразвуковых колебаний от излучателей до приемников будут определяться соотношениями
прохождения ультразвуковых колебаний от излучателей до приемников будут определяться соотношениями

где L - расстояние между излучателями И1, И1' и приемниками П1, П1' ультразвуковых колебаний; а - скорость распространения звука в воздухе.
Как только первые электрические колебания, создаваемые на выходах пьезоэлектрических приемников П1, П1' и П2, П2', пройдя через усилители У1, У1' и У2, У2' и детекторы Д1, Д1' и Д2, Д2' поступают на модуляторы M1, M1' и М2, М2', работающие в триггерном режиме, модуляторы 5 закрывают проход колебаний от генератора 2 к пьезоэлектрическим элементам излучателей И1, И1' и И2, И2' и посылка ультразвуковых колебаний от излучателей 3 прекратится. Модуляторы M1, M1' и М2, М2' вновь открываются после того как последние ультразвуковые колебания первых пакетов достигнут пьезоэлектрических приемников П1, П1' и П2, П2'.
В результате между пьезоэлементами пары И1-П1 и И1'-П1' и пары И2-П2 и И2'-П2' будут проходить пакеты ультразвуковых колебаний с периодами следования 2Т1,  и 2Т2,
и 2Т2,  . На входы схемы вычитания СВ1 и схемы вычитания СВ2 будут поступать процессы с частотами ƒ1,
. На входы схемы вычитания СВ1 и схемы вычитания СВ2 будут поступать процессы с частотами ƒ1,  и ƒ2,
и ƒ2,  , определяемых соотношениями
, определяемых соотношениями

На выходах схем вычитания СВ1 и СВ2 формируются информативные сигналы измерительных каналов в виде разности  и
и  определяемые соотношениями вида
определяемые соотношениями вида

Представляя косинусы суммы и разности в виде
cos(Θ0+α)=cosΘ0 cosα+sinΘ0 sinα;
cos(Θ0-α)=cosΘ0 cosα-sinΘ0 sinα,
и принимая Θ0=45°, cos45°=sin45°= , получим
, получим

Сумма (Δƒ1+Δƒ2) и разность (Δƒ1-Δƒ2) будут определяться как

Тогда аналитическое выражение для определения аэродинамического угла α в измерительных каналах кинематического датчика аэродинамического угла и истинной воздушной скорости будет иметь вид

Сумма квадратов Δƒ12+Δƒ22 будет определяться соотношением

Тогда аналитическое выражение для определения величины истинной воздушной скорости VB=V в измерительных каналах кинематического датчика аэродинамического угла и истинной воздушной скорости будет иметь вид

Полученные соотношения (5) и (6) определяют алгоритмы обработки информативных сигналов Δƒ1 и Δƒ2, которые подаются с выходов схем вычитания СВ1 и СВ2 на вход вычислителя 9. На выходе вычислителя 9 формируются выходные цифровые (кодовые) выходные сигналы  и Nα кинематического датчика аэродинамического угла и истинной воздушной скорости, которые подаются на средства отображения информации в систему автоматического управления и другим потребителям.
и Nα кинематического датчика аэродинамического угла и истинной воздушной скорости, которые подаются на средства отображения информации в систему автоматического управления и другим потребителям.
Таким образом, кинематический датчик аэродинамического угла и истинной воздушной скорости для регистрации параметров набегающего воздушного потока использует только два приемника, выполненных в виде совмещенных пьезоэлектрических излучателей-приемников ультразвуковых колебаний. Измерительная схема кинематического датчика включает только два измерительных канала с частотными информативными сигналами, выделение, преобразование и обработка которых обеспечивается с меньшими погрешностями, чем аналоговые сигналы, что существенно упрощает ее реализацию. Весьма простые алгоритмы определения измеряемого аэродинамического угла и истинной воздушной скорости упрощают реализацию вычислителя, формирующего цифровые (кодовые) выходные сигналы кинематического датчика по аэродинамическому углу и истинной воздушной скорости. Все это упрощает конструкцию, снижает стоимость, повышает точность измерения и обеспечивает конкурентоспособность применения кинематического датчика аэродинамического угла и истинной воздушной скорости на летательных аппаратах, в том числе самолетах различного класса и назначения.
Применение кинематического датчика аэродинамического угла и истинной воздушной скорости на летательных аппаратах, в том числе самолетах позволит повысить точность измерения аэродинамического угла и истинной воздушной скорости, что позволит повысить уровень безопасности полета, особенно на предельных режимах, улучшить качество пилотирования и обеспечить эффективность решения тактико-технических задач полета.
| название | год | авторы | номер документа |
|---|---|---|---|
| БОРТОВАЯ СИСТЕМА ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВЕКТОРА СКОРОСТИ ВЕТРА НА СТОЯНКЕ, СТАРТОВЫХ И ВЗЛЕТНО-ПОСАДОЧНЫХ РЕЖИМАХ ВЕРТОЛЕТА | 2014 |
|
RU2587389C1 |
| МЕТОЧНЫЙ ДАТЧИК АЭРОДИНАМИЧЕСКОГО УГЛА И ВОЗДУШНОЙ СКОРОСТИ | 2010 |
|
RU2445634C2 |
| Система воздушных сигналов вертолета | 2018 |
|
RU2695964C1 |
| МЕТОЧНЫЙ ДАТЧИК АЭРОДИНАМИЧЕСКОГО УГЛА И ИСТИННОЙ ВОЗДУШНОЙ СКОРОСТИ | 2014 |
|
RU2580208C1 |
| МЕТОЧНЫЙ ДАТЧИК АЭРОДИНАМИЧЕСКОГО УГЛА И ИСТИННОЙ ВОЗДУШНОЙ СКОРОСТИ | 2014 |
|
RU2585126C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ВОЗДУШНОГО ПОТОКА | 1982 |
|
SU1190731A1 |
| СИСТЕМА ИЗМЕРЕНИЯ ВЫСОТНО-СКОРОСТНЫХ ПАРАМЕТРОВ ЛЕТАТЕЛЬНОГО АППАРАТА | 2011 |
|
RU2477862C1 |
| БОРТОВАЯ СИСТЕМА ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВЕКТОРА СКОРОСТИ ВЕТРА НА СТОЯНКЕ, СТАРТОВЫХ И ВЗЛЕТНО-ПОСАДОЧНЫХ РЕЖИМАХ ВЕРТОЛЕТА | 2014 |
|
RU2592705C2 |
| СИСТЕМА ИЗМЕРЕНИЯ МАЛЫХ ВОЗДУШНЫХ СКОРОСТЕЙ ВЕРТОЛЕТА | 2009 |
|
RU2426995C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КИНЕМАТИЧЕСКИХ ПАРАМЕТРОВ ВОЗДУШНОГО ПОТОКА | 1982 |
|
SU1048922A1 |
Использование: для измерения величины (модуля) и угла направления (аэродинамического угла) вектора истинной воздушной скорости летательного аппарата. Сущность изобретения заключается в том, что кинематический датчик аэродинамического угла и истинной воздушной скорости содержит плату с приемниками, регистрирующими параметры набегающего воздушного потока, измерительную схему, вычислительное устройство обработки и формирования выходных сигналов, при этом приемники выполнены в виде двух совмещенных пар пьезоэлектрических излучателей-приемников ультразвуковых колебаний по направлению набегающего воздушного потока и против него, установленных ортогонально друг к другу под углом Θ0=45° к оси платы, относительно которой отсчитывается значение аэродинамического угла, при этом входы пьезоэлектрических излучателей через элементы измерительной схемы - модуляторы подключены к генератору синусоидальных колебаний высокой частоты, а пьезоэлектрические приемники через усилители и детекторы измерительной схемы подключены к входам двух схем вычитания частот, на выходе которых формируются разности частот пар приемников, воспринимающих ультразвуковые колебания в противоположных направлениях, выходы схем вычитания частот подключены к входу вычислительного устройства обработки и формирования выходных сигналов, выполненного в виде вычислителя, выходы которого являются цифровыми выходами по аэродинамическому углу α и истинной воздушной скорости VB, определяемые в соответствии с заданными алгоритмами. Технический результат: упрощение конструкции, повышение точности измерения, уменьшение числа измерительных каналов и упрощение измерительной схемы и устройства обработки информации и формирования выходных сигналов. 6 ил.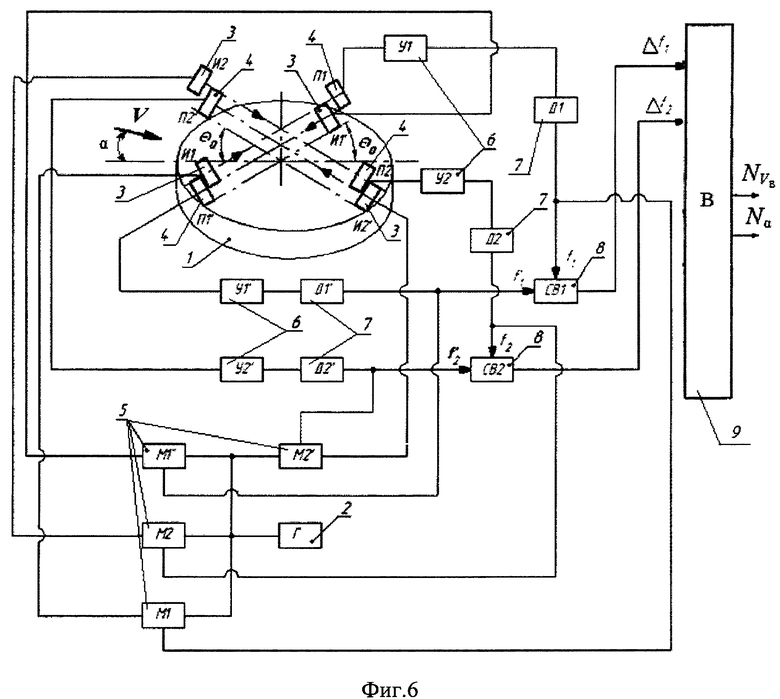
Кинематический датчик аэродинамического угла и истинной воздушной скорости, содержащий плату с приемниками, регистрирующими параметры набегающего воздушного потока, измерительную схему, вычислительное устройство обработки и формирования выходных сигналов, отличающийся тем, что приемники выполнены в виде двух совмещенных пар пьезоэлектрических излучателей-приемников ультразвуковых колебаний по направлению набегающего воздушного потока и против него, установленных ортогонально друг к другу под углом Θ0=45° к оси платы, относительно которой отсчитывается значение аэродинамического угла, при этом входы пьезоэлектрических излучателей через элементы измерительной схемы - модуляторы подключены к генератору синусоидальных колебаний высокой частоты, а пьезоэлектрические приемники, через усилители и детекторы измерительной схемы подключены к входам двух схем вычитания частот, на выходе которых формируются разности частот пар приемников, воспринимающих ультразвуковые колебания в противоположных направлениях, выходы схем вычитания частот подключены к входу вычислительного устройства обработки и формирования выходных сигналов, выполненного в виде вычислителя, выходы которого являются цифровыми выходами по аэродинамическому углу α и истинной воздушной скорости VB, определяемые в соответствии с алгоритмами

где L - расстояние между пьезоэлектрическими излучателями и приемниками ультразвуковых колебаний; Δƒ1=ƒ1-ƒ1' и Δƒ2=ƒ2-ƒ2', ƒ1, ƒ1' и ƒ2, ƒ2' - частоты ультразвуковых колебаний, воспринимаемых парами приемников в противоположных направлениях.
| МЕТОЧНЫЙ ДАТЧИК АЭРОДИНАМИЧЕСКОГО УГЛА И ВОЗДУШНОЙ СКОРОСТИ | 2010 |
|
RU2445634C2 |
| 0 |
|
SU155826A1 | |
| Статья: "СТРУКТУРЫ И ХАРАКТЕРИСТИКИ ИОННО-МЕТОЧНЫХ ДАТЧИКОВ АЭРОДИНАМИЧЕСКИХ УГЛОВ И ВОЗДУШНОЙ СКОРОСТИ", ЧУМАРОВ А.Р., Ж | |||
| ИЗВЕСТИЯ ВЫСШИХ УЧЕБНЫХ ЗАВЕДЕНИЙ | |||
| АВИАЦИОННАЯ ТЕХНИКА, номер 3, 2001, стр | |||
| Нивелир для отсчетов без перемещения наблюдателя при нивелировании из средины | 1921 |
|
SU34A1 |
| Прибор для автоматического определения содержания свинца в рудах и концентратах | 1959 |
|
SU127473A1 |
| WO 2016164624 A1, 13.10.2016 | |||
| US 10118696 B1, 06.11.2018. | |||

