I
. Изобретение относится к области измерения параметров движения и может быть использовано при гидрологических исследованиях.
Известны измерители скорости и направления течения , содержащие герметичный корпус с заключенными в нем компасом и регистратором, хвостовым оперением снаружи корпуса для ориентации прибора в потоке и.ротором с вертикальной осью, который приводится во вращение движением потока воды. В этих измерителях направление течения измеряется по угловому положению корпуса с хвостовым стабилизатором относительно внутреннего магнитного компаса, а ско рость течения измеряется по средней угловой скорости вращения ротора (по числу оборотов в единицу времени) .
Приборы этого типа имеют два существенных недостатка, приводящих к недостаточно правильному и точному
измерению результирующих векторов как скорости, так и направления течения . Первый недостаток состоит в том,-ЧТО при малых скоростях течения (менее 10 см/с) хвостовое оперение не обеспечивает достаточно точной установки корпуса прибора вдоль потока из-за относительно большого веса прибора и обусловленного этим весом трения в вертлюге, на котором
10 подвешивается прибор, к тросу.
Второй недостаток состоит в том, что инерционность ротора, корпуса с хвостовым оперением и картушки магнитного компаса довольно сильно
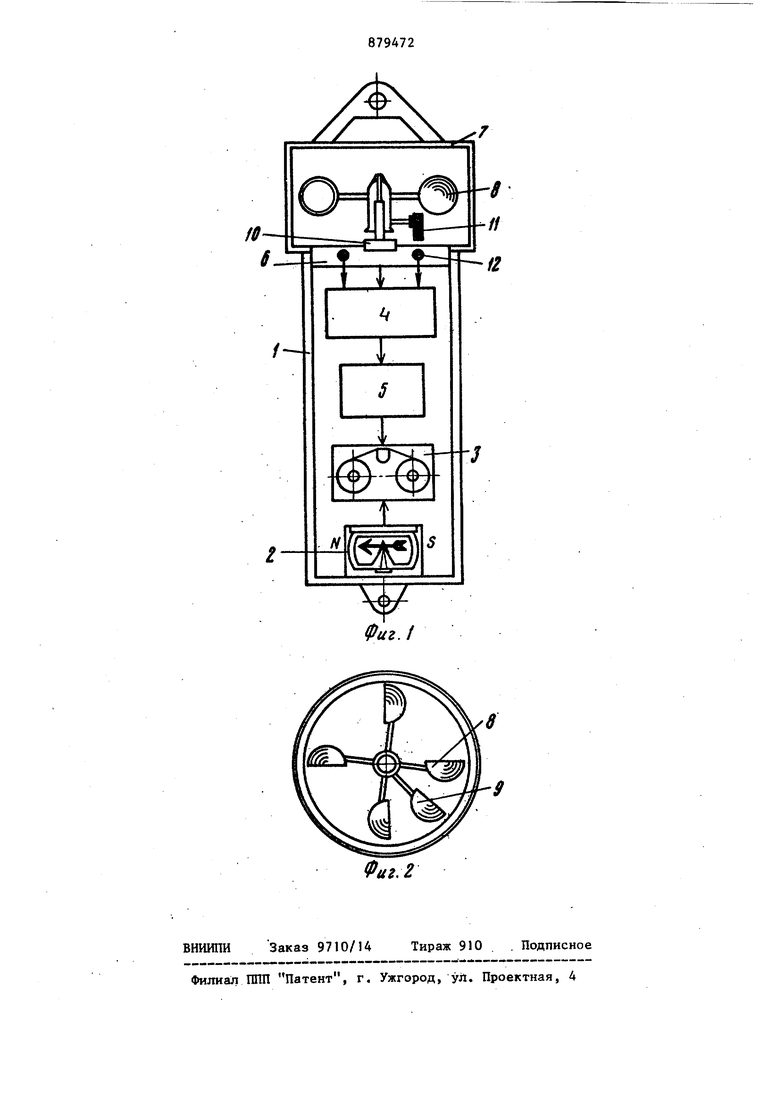
IS различаются. Это приводит к тому, что при наличии в водном потоке пульсирующей по величине и направлению составляющей, например от волнения , все три названных чувствитель20ных элемента совершают вынужденньш колебания около среднего положения с различными фазовыми сдвигами и амплитудами. При одновременной фиксации их мгновенного/положения, как это делается в существующих при борах, отсчеты получаются в значительной степени случайными и не отр жают с требуемой точностью среднего -значения измеряемых величин. Наиболее близким по технической сущности к предлагаемому изобретени является измеритель скорости и направления течения 2. Этот измеритель содержит герметичный корпус, расположенный на нем сбалансированньШ по весу ротор с вертикальной осью, преобразователь его вращения в электрический сипнал, вьшолнеиный в виде закрепленного на роторе магн та, и магниточувствительных элементо установленных внутри корпуса и соед ненных с электронной схемой, содержащей блоки определения скорости и направления, подключенной к регистратору, связанному с магнитным компасом. Недостатками и-звестного устройств являются низкие чувствительность и точность измерения направления и скорости течений в придонном слое, характеризующихся малыми абсолютными величинами и большими вертикальными градиентами. Цель изобретейия - устранение указанных недостатков. Для этого ротор измерителя снабжен элементом геометрической асимметрии, а электронная схема снабжен дополнительным Модулем вьщеления экстремума угловой скорости ротора, подключенным к выходу блока определения скорости и направления. На фиг. 1 приведена функциональн схема предлагаемого измерителя скорости и направления течения; на фиг. 2 - то же, вид сверху. Измеритель содержит герметичный корпус 1 и заключенные в нем магнит ный: компас 2, регистратор на магнит ной ленте 3 и электронную схему 4 с дополнительным модулем 5. Снаружи корпуса на верхней крышке 6 в защит ном ограждении 7 установлен ротор 8 с элементом асимметрии 9. Ротор подвешен на острие опоры 10. На роторе закреплен магнит 11, взаимодей ствующий с магниточувствительными диодами 12, установленными на крышке 6. Работа измерителя осуществляется Следующим образом. Прибор, подвешен ный на шарнире в придонном слое 24 воды, обтекается водным потоком со скоростью в диапазоне от 0,2 до 15 см/с. Корпус 1 сохраняет вертикальное положение за счет собственного веса и шарнирной подвески. Под действием потока воды ротор 8 начинает вращаться, причем, благодаря элементу асимметрии 9, его вращение происходит неравномерно. Когда злемент 9 движется по потоку, скорости ротора увеличивается, а при встречном движении замедпяется. При вращении ротора 8 магнит 11 проходит над магниточувствительными диодами 12, вызывая изменение их проводимости. Импульсы тока, образовавшиеся в диодах 12, поступают в электрическую схему 4, в которой происходит подсчет числа импульсовв единицу времени, а также измерение длительности импульсов, характеризующей мгновенные скорости ротора при прохождении магнита над каждым диодом. По среднему числу импульсов в единицу времени схема 4 определяет скорость течения, а по моменту прохождения ротором точки с максимальной угловой скоростью определяется направление течения. Выявление максимальной угловой скорости, расчет угла направления по-тока и введение необходимых поправок на инерционность ротора при различных скоростях выполняется модулем 5. При этом показания магнитного компаса- 2, измеряющего ориентацию корпуса 1 относительно магнитного меридиана с учетом магнитного склонения, суммируются с результатом вычисления условного направления потока относительно корпуса и в итоге получается истинное направление течения относительно географического меридиана. После обработки электрических сигналов в модуле 5 результаты прямых измерений скорости и вычисленное значение направления записываются в цифровой форме на магнитную ленту регистратором 3. В электронной схеме прибора мгновенная скорость вращения ротора измеряется по длительности импульса, вызываемого прохождением магнита мимо магниточувствительного диода. Дополнительный модуль в электронной схеме служит для вычисления направления течения по измеренным величинам мгновенных скоростей вращения ротора в нескольких точках, а также
введение поправок к .направлению, .учитывающих инерционность ротора при различных скоростях вращения. Модуль представляет собой однокристальный микропроцессор, выполненный на экономичной по питанию интегральной серии микросхем.
6 предлагаемом изобретении повышение чувствительности и точности измерений направления и скорости течения достигается за счет следующих факторов.
Во-первых, благодаря подвеске ротора в одной точке на острие иглы, а не в двух, как в прототипе, исчезает тормозящий момент небаланса ротора, и резко снижается трение в опоре, в результате чего исчезают углы застоя и связанные с этим явлением погрешности измерения
Во-вторых, введение конструктивно го элемента асимметрии непосредствен но в ротор позволяет отказаться от использования отдельной поворотной лопасти и тем самым исключить все погрешности, связанные с последней.
В-третьих, исчезают также допол-.. нительные погрешности, обусловленные неодинаковостью момента инерции ротора и лопасти и их пространственным разносом.
Формула изобретения
Измеритель скорости и направления течения, содержащий герметичный кор794726
пус, расположенный на нем сбапанси рованный по весу ротор с вертикальной осью, преобразователь его вращения в электрический сигнал, выполненный в.виде закрепленного на роторе магнита и магниточувствительных элементов, установленных внутри корпуса и соединенных с электронной схемой, содержащей блоки определения скорости и направления, подключенной к регистратору, связанному с магнитным компасом, отличаю щ и и с я тем, что, с целью повышения чувствительности и точности -нз
15 мерения при малых абсолютных величинах и больших вертикальных градиентах, ротор снабжен элементом геометрической асимметрии, а электронная схема снабжена дополнительным модулем выделения зкстромуыа. угловой
20 скорости ротора, подключенным к выходу блока определения скорости и направления.
Источники информации,
25 принятые во внимание при экспертизе
1.Самописец течения типа БПВ-2. Руководство по гидрологическим работам в океанах и морях, Л., Гидрометеоиздат, 1977.
2.Патент США 3330155, кл. 73-89, 1967 (прототип).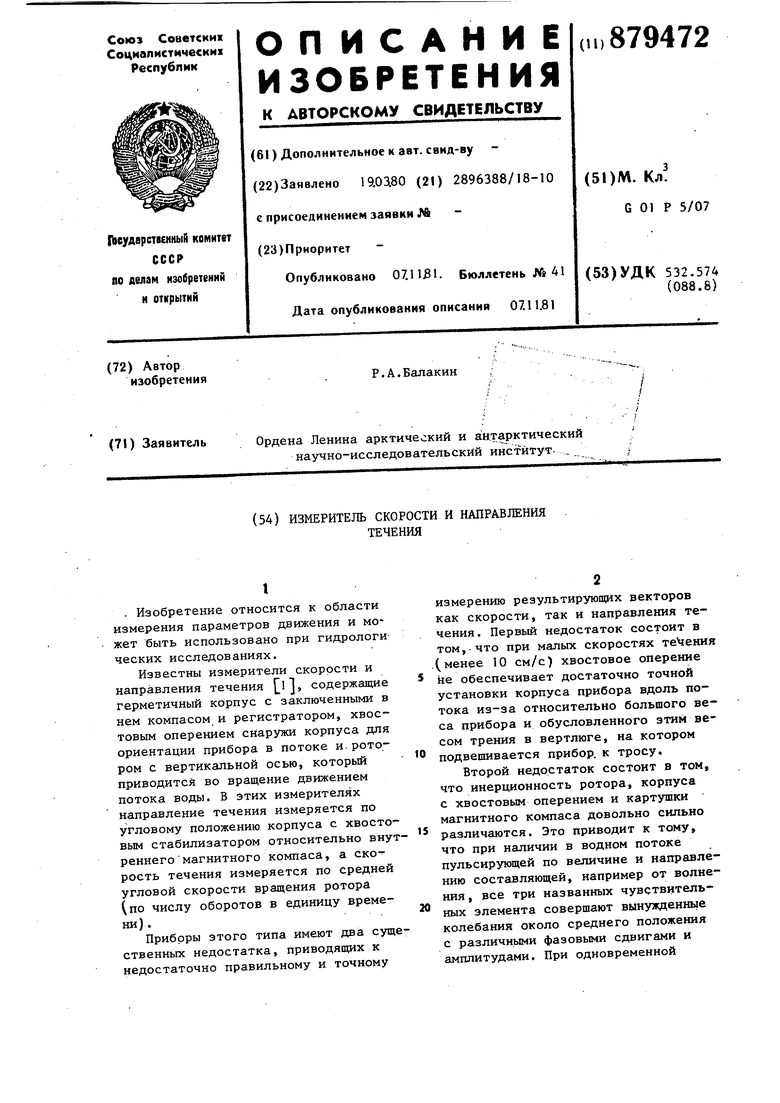
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОНОМНОЕ УСТРОЙСТВО ДЛЯ РЕГИСТРАЦИИ СКОРОСТИ И НАПРАВЛЕНИЯ ТЕЧЕНИЯ ЖИДКОСТИ И ГАЗА | 2012 |
|
RU2503962C1 |
| Автономный измеритель течения | 1974 |
|
SU581433A1 |
| Устройство для измерения скорости морских течений | 1983 |
|
SU1150543A1 |
| Устройство для автоматической передачи на расстояние показаний об изменении скорости и направления морских течений | 1947 |
|
SU77773A1 |
| ИНТЕГРАЛЬНЫЙ ТОКОМАГНИТНЫЙ ДАТЧИК СО СВЕТОДИОДНЫМ ИНДИКАТОРОМ | 2005 |
|
RU2300824C1 |
| Измеритель течений | 1979 |
|
SU851266A1 |
| Ультразвуковой анемометр портативной метеостанции | 2021 |
|
RU2779615C2 |
| Устройство для измерения и регистрации скорости и направления ветра | 1960 |
|
SU134494A1 |
| БЕСКОНТАКТНЫЙ ДАТЧИК СКОРОСТИ АВТОМОБИЛЯ | 2004 |
|
RU2270452C2 |
| МАГНИТНЫЙ КОМПАС | 1994 |
|
RU2089855C1 |