(54) ЙЗНЕРИФВЯЬ ТБЧЕК(Ш
| название | год | авторы | номер документа |
|---|---|---|---|
| НАЗЕМНЫЙ ГРАВИМЕТРИЧЕСКИЙ ДАТЧИК ИСТИННЫХ АЗИМУТОВ И УГЛОВ ОТКЛОНЕНИЯ ЕГО СИСТЕМЫ КООРДИНАТ ОТНОСИТЕЛЬНО ВЕКТОРА СИЛЫ ТЯЖЕСТИ | 2004 |
|
RU2260176C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УСКОРЕНИЯ СИЛЫ ТЯЖЕСТИ НА ДВИЖУЩЕМСЯ ОБЪЕКТЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2550161C1 |
| Зондирующий комплекс профиля скоростей течения | 1979 |
|
SU792144A1 |
| ИЗМЕРИТЕЛЬ СКОРОСТИ ТЕЧЕНИЯ | 1991 |
|
RU2050547C1 |
| Устройство для измерения и регистрации скорости и направления течений | 1983 |
|
SU1164605A1 |
| СПОСОБ ДИСТАНЦИОННОГО ОПРЕДЕЛЕНИЯ КООРДИНАТ МЕСТОПОЛОЖЕНИЯ НАЗЕМНОГО (НАДВОДНОГО) ОБЪЕКТА | 2020 |
|
RU2749194C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ВЕТРА | 2001 |
|
RU2206112C1 |
| Способ прогнозирования сейсмического события и наблюдательная система для сейсмических исследований | 2016 |
|
RU2625100C1 |
| СПОСОБ ДИСТАНЦИОННОГО ОПРЕДЕЛЕНИЯ КООРДИНАТ МЕСТОПОЛОЖЕНИЯ НАЗЕМНОГО ОБЪЕКТА | 2000 |
|
RU2182713C2 |
| Устройство для ориентирования отклонителя в скважине | 1982 |
|
SU1046491A1 |
t
Изобретение относится к приборостроен «о и может быть использовано при измерении скорости и направления морских течений.с
Известны автонс«4ные приборы для Mp- мерения скорости и направления течения, построенные на принципах механичест кого преобразования гидродиналшческого давления потока в угловое перемещение оси первичного измерительного , преобразователя. Чувствительным элементов у этих приборов обычно является ротор (лопастной винт, К1зыльчатка) с гориэовтальйой или вертикальной осью вращения. Направление тбче- 5 ния определяется измерением угла между диаметральной плоскостью установившегося в потоке корпуса и магнитным меридианом {1J.
Недостатки этих приборов йакгаоча- ются в том, что они измеряют только горизонтгшьные составляющие тёчеиия, в результатеполучается искаженная информация о потоке, поскольку „ в нем присутствует еще и вертикальная составляющая, не рёгистрируе1 ая этимя приборами. Кроме того, в таких приборах отсутствуют устройства и узлы, обеспечивающие стабилизацию их в потоке.
Наиболее близким к предлагаемому ио технической сущности и достигаеMc fy результату является измеритель течений, содержащий измерительные элементы, поталисообщающийся с окружающе средой подвижный корпус, в котором расположены блок, определяющий положение корпуса относительно магнитного меридиана, успокоитель и ориентатор на земной центр, а также шарнирно соединенный с полым корпусом кронштейн, установленный на штанге с возможностью поворота вокруг нее, на котором закреплен съемный герметичньй корпус с установленными в нем регистратором и блоком питания 21.
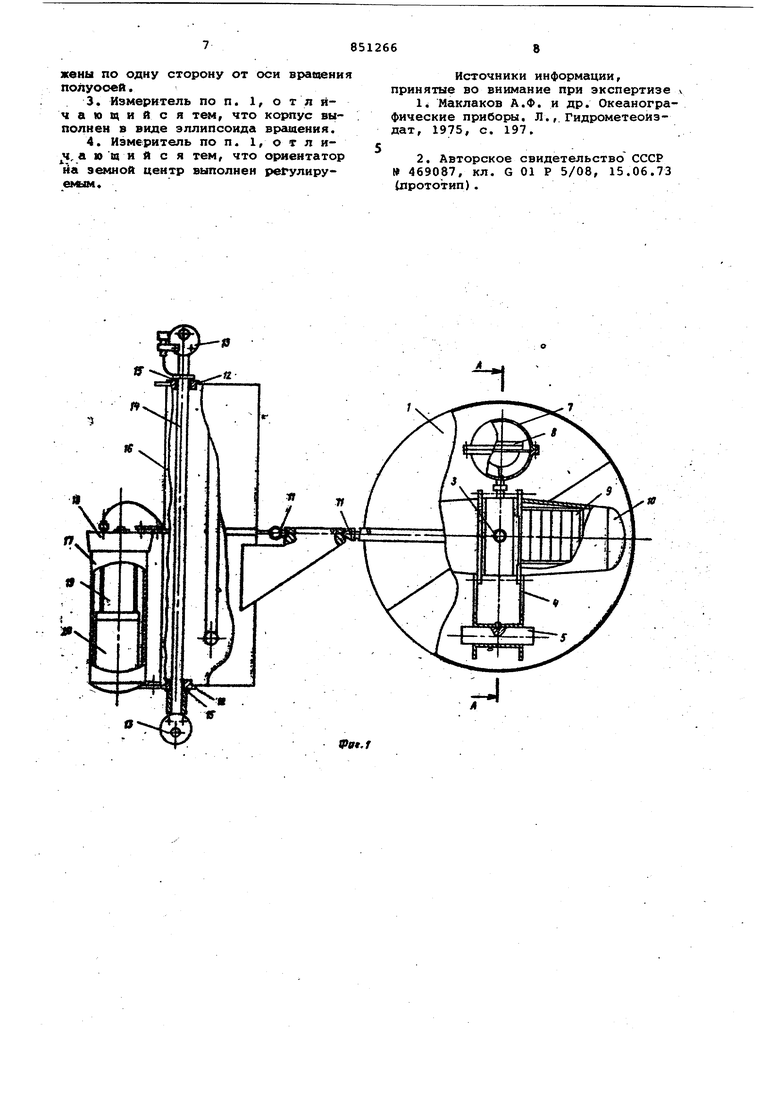
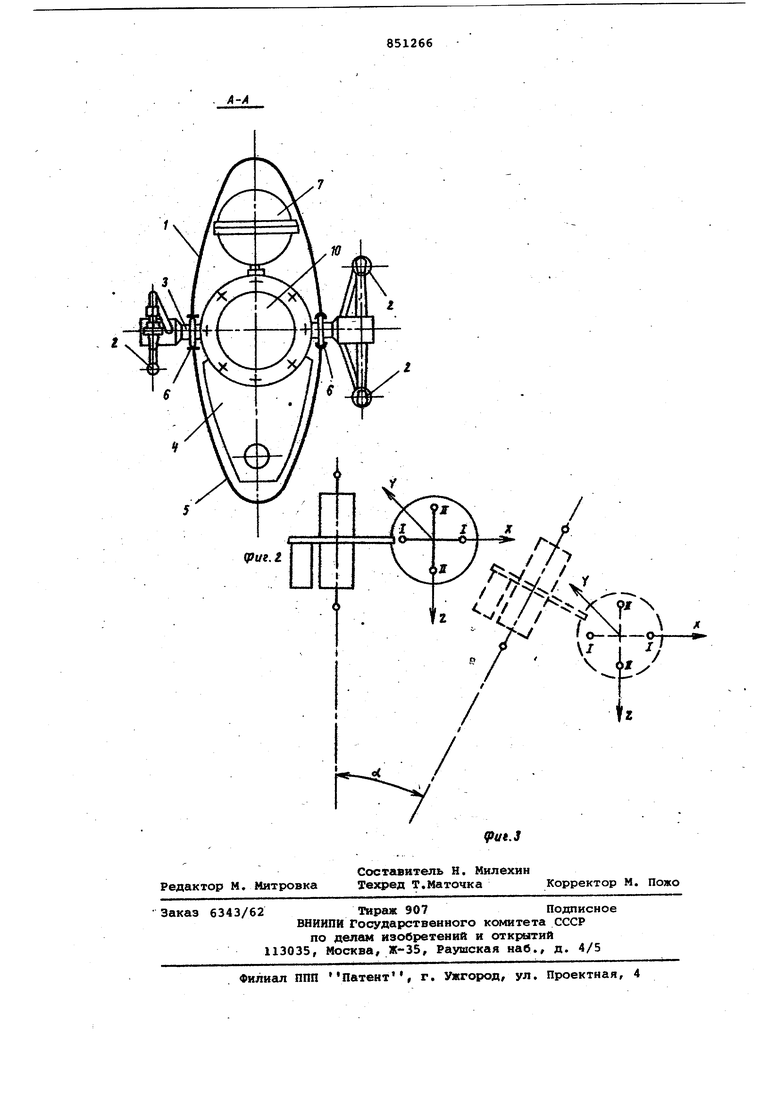
Существенным недостатком известного измерителя является ннзкая точность получаемых результатов из-за неэффективности действия стабилизирувяцих и ориентирукяцих устройств, поскольку они жестко связань с корпусом измерителя, а корпус - с измерительными элементами. Это особенно сказывается при измерениях течений в больших акваториях, когда на . результаты измерений отражается не- стационарность и турбулентность потоков, стремящихся вывести измеритель ИЗ занимаемого им положения. Кроме того, на чувствительные элементы вместе с потоком воздействует гидростатическое давление, поскольку это давление на разных горизонтах разное, так как при измерении на них течений появляются дополнительные ошибки, то это приводит к необходимости корректировки полученной информации и усложняет обработку данных. Цель изобретения повышение точн сти измерения. Указанная цель достигается тем, что известный измеритель снабжен установленным в полом корпусе по его поперечной оси с возможностью вращения двумя полуосями, на которых жест ко закреплены измерительные элементы расположенные снаружи подвижного корпуса, блок определения положения корпуса относительно магнитного мери диана, успокоитель и ориентатор на земной центр. Кроме того, корпус выполнен в виде эллипсоида вращения, а успокоитель и ориентатор на земной центр, выполненный регулируемым, расположены по одну сторону от оси вращения полуосей. Наличие в измерителе дисбалансного устройства (успокоителя с о.риентатором),самоориентирующегося по отношению к земному центру, и его защи щенность от внешних неблагоприятных факторов при помощи корпуса обеспечивает невосприимчивость измерителя к пульсациям и турбулентности потоков , что в целом в работе измерител создает благоприятные условия,°при которых возможно получить наибольшую точность и достоверность получаемой информации. Этому способствует также взаимная жесткая связь между составными частями дисбалансного устройства и измерительными элементами. Выполнение корпуса в виде эллип соида вращения обеспечивает постоян ную непреривную самоориёнтацию измерителя по потоку, что повькиает точность определения направления те чения. Расположение успокоителя и ориентатора по одну сторону от полу осей обеспечивает ускоренное затухание колебаний дисбалансного устро ства и придает стабильность ориенти рованному положению измерительных элементов, что также повышает точность измерений. Возможность регули рования ориентатора позволяет установить и отрегулировать дисбалаисно устройство в положение, при котором достигается наибольшая стабильность его работы, что также способствует повшиению точности измерений. На фиг. 1 изображен предлагаемый измеритель, общий вид; на фиг. 2 разрез А-А на фиг. 1; на фиг. 3 схема ориентации измерительных элементов, например, при воздействии на измеритель сильных подводных течений. Измеритель течений содержит корпус 1, выполненный в виде полого эллипсоида вращения, способного заполняться водой, например, через отверстия, расположенные по периметру корпуса не показаны, измерительные элементы 2 в виде двух пар взаимно перпендикулярных ультразвуковых излучающих и приемных антенн 1-1 и 1111, ориентированных по ортогональньи осям системы прямоугольных координат в пространстве, размещенных по обеим сторонам корпуса 1 и закрепленных на полуосях 3, расположенных по поперечной оси корпуса 1 и жестко связанных с успокоителем 4 и ориентаторсян 5 на земной центр. При этом полуоси 3, успокоитель 4 и ориентатор 5 на земной центр совместно образуют защищенное корпусом от возмущения водных масс дисбалансное устройство, самоориентирующееся на земной центр. С иентатор 5 на земной центр в виде регулируемого груза закреплен в успокоителе 4. Легкий ход полуосей 3 обеспечивают подшипники 6. Внутри корпуса 1 размещены также загерметизированный в кожухе 7 блок 8, определяющий положение корпуса 1 относительно магнитного меридиана и представляющий собой, например, магнитный компас авиашюнного типа, и электрюнный блок 9 в герметическом кожухе 10. Корпус 1 имеет две степени свободы перемещения, благодаря узлам 11 и 12 вращения, обеспечивающим его свободное вращение в вертикальной и горизонтальной плоскостях. Подвески 13 обеспечивают применение измерителя как в заякоренном положении,когда он крепится к буйрепу (не показан), так и при измерениях с борта судна. Верг тйкальная штанга 14 в виде оси, посаженная на подшипниках 15 кронштейна 16, обеспечивает свободное горизонтальное перемещение корпуса 1 и связанных с ним измерительных элементов 2. К кронштейну 16, который слу,жит несущим з лементом измерителя, крепитсялегко съемный герметичный корпус 17 с крышкой 18, внутри которого размещены регистрирующее устройство 19 и блок 20 питания. Конструкция предлагаемого измерителя позволяет крепить его, например, к буйрепу при псмощи стандартных рам (не показаны), применяемых в океанографии в качестве несущего элемента для приборов. Измеритель работает следующим образом.. ., С Судна опускают на буйрепе закрепленный измеритель течений на ту глубину, на которой н§обходимо проводить измерения. Нижний конец буйрепа закрепляется к грунту люёым известным способом. При непрерывном
измерении на разных горизонтах, например, с борта судна нижний конец буйрепа и соответственно его креплеиие к грунту HJ производится. Под действием морских течений на корпус 1. благодаря его эллипсридау вращения и возможности сдободшого перемещения в узлах 11 и 12 вращения измеритель занимает ориентированное положение в потоке, при этом дисбалансное устройство в составе успокоителя 4 и ориентатора 5 на земной центр при затухающем колебательном вращении полуосей 3 в подшипниках б занимает положение,при котором измертельные элементы 2 устанавливаются доответственно в стабильном вертикальном и горизонтальном положениях. Затуханию колебаний полуосей 3 способствует связанный- с ним успокоител 4, принимающий своими плоскими поверностями-лопастями противодавление воды, находящейся внутри корпуса 1, При отклонении буйрепа, а также измерителя от вертикального положения, например, на угол оС (фиг. 3) , что при измерениях течений в больших акваториях неизбежно, поскольку зто определяется как дрейфом судна, так .и воздействиемсильного течения и особенно турбулентности потока, измерительные элементы 2 и их антенны I-I и II-II остаются в первоначальном, ориентированном в пространстве положении соответственно координатным осям Х,У и Z, чем объясняется повышенная точность измерения.
Процесс измерения течений, включающий .измерение величин их горизонтальной и вертикальной составляющих относительно земного центра и магнитного .меридиана, производится общеизвестным способом, например,по следующей схеме. Измеритель течений регистрирует величину горизонтальной составляющей скорости течения и ее угол отклонения от магнитного меридиана, а также величину его вертикальной составляющей, в результате представляется возможность при обработке данных получить скалярную величину, выраженную в м/с, вектора скорости течения и его пространственное положекие относительно прямоугольной .координатной системы в пространстве, ориентированный осью Z на центр Земли, а осями X и У - соответственно на широка и долготы координатной сетки «ашей ,
В основу измерения скорости течения положен частотный способ измерения с помощью ультразвука. Информация о скорости потока получается как разность частот автоциркуляции акустического синхрокольца измерительных антенн I-I и II-II, расположенных по соответствующим с тогональным осям, при циркуляции акустического синхрокольца в обоих направлениях относительно потока путем подсчета разности числа импульсов за определенный интервал времени изме рения. Интервал измерений выбирает ся таким образом, чтобы число импульсов соответствовало физической величине измеряемого параметра, напоавления течения сводится X измерению угла поворота корпуса 1 по отношению к магнитному меридиану, осуществляемое блоком 8, определяющим положение корпуса относительно магнитного меридиана, включающим, например, компас.авиационного типа, который непосредственно связан со следящей системой отработки угла поворота относительно магнитного меридиана земли с ВЫХОДСЛ1 на8-разрядный преобразователь угол-код- . Информаци«Г-р физических величинах в виде двоимого кода по кабелю-тросу (не показан) передается на буйковую станцию .или записывается регистрирующим устройством 19, например, на магнитную ленту. Питание измерителя осуществляется блоком 20 питания.
Таким образом, предлагаемый измеритель течений представляет собой дисбала сную систему в потоке, занимающую бриентированное положение относительно потока и земного центра независимо от действующих на измеритель внешних факторов, и обеспечивает оп| еделение истинной скорости и направления течения в больших зкваториях, например в морях и океанах.
Формула изобретения
на земной центр, и расположенные снаружи корпуса измерительные элементы.
на земной центр выполнен регулиру6МЫМ«
Источники информации, принятые во внимание при экспертизе v li Маклаков А.Ф. и др. Океанографические приборы, Л.,. Гидрометеоиздат, 1975, с. 197.
