Изобретение относится к измерительной технике и может быть использовано для определения скорости и направления течения жидкости и газа.
Известны измерители течений, способные ориентироваться по направлению течения и измерять его скорость и направление (пат. РФ №54435). Однако это крупногабаритные электромеханические конструкции, ориентирующиеся по течению только в горизонтальной плоскости. При этом вертикальная составляющая течения не учитывается и вносит ошибку измерения, не поддающуюся коррекции в известном устройстве вследствие того, что отклонение корпуса прибора от вертикали не измеряется и не учитывается. Кроме этого, в известном устройстве не учтены погрешности определения азимута за счет отклонения от вертикали и за счет вертикальной составляющей магнитного поля Земли.
Известен малогабаритный измеритель полного вектора скорости водного потока на основе электролитического метода измерения скорости течения (а.с. СССР №1638630). Измеритель содержит датчик скорости в виде вертушки и гидрофлюгер в виде обтекателя, направляющих пластин, уравновешивающих поплавков, карданного подвеса и корпуса, которые закреплены консольно на опоре с одной стороны вертикальной несущей штанги. Электролитическим способом снимают информацию о модуле вектора скорости потока и регистрируют направление вектора скорости. Однако этот прибор способен ориентироваться по направлению потока в узких пределах и не может быть использован без ручной ориентации по потоку в случаях, когда направление вектора потока изменяется на большие углы или совершает циркуляции. Кроме того, направление потока определяется относительно штанги, которая в свою очередь требует ручной ориентации и положение которой не фиксируется в сигналах измерителя. В приборе используется сложная система электродов, к качеству изготовления которых предъявляются высокие требования. Также необходимы дополнительные аппаратные и вычислительные затраты на обработку сигналов.
Известно устройство для определения скорости и направления течения жидкости (пат. РФ №2413232), выбранное в качестве прототипа. Устройство содержит блок записи и обработки информации, приемный блок, аппаратурный блок в виде герметичного корпуса с лопастями, уравновешивающим поплавком с регулировочным грузом, узел подвеса и датчик скорости. Аппаратурный блок снабжен цифровой системой обработки и передачи сигналов на базе микроконтроллера и содержит датчики ориентации: датчик отклонения от направления магнитного поля в виде трехосевого электронного компаса и датчик отклонения от вертикали в виде двухосевого инклинометра. Узел подвеса закреплен на снабженном кабельной линией жестком носителе и выполнен с возможностью вращения аппаратурного блока вокруг вертикальной оси и качания вокруг горизонтальной оси. За счет узла подвеса и датчиков ориентации устройство способно самоориентироваться в потоке морской воды по азимуту и углу места, измерять и учитывать вертикальную составляющую течения при определении его скорости и направления.
Однако для определения скорости течения прототип содержит отдельный датчик модуля скорости течения, что повышает сложность устройства и снижает его надежность. Кроме того, оборудование известного устройства отдельными блоками записи и обработки информации, приемным блоком, а также системами, обеспечивающими возможность передачи питания от приемного блока к аппаратурному и передачу результатов измерений от аппаратурного к приемному блоку под водой - герметичные разъемы, кабель и узел подвеса измерительного блока, усложняет схемы рабочих блоков прототипа и алгоритмы их работы, снижает надежность.
Задача изобретения состоит в упрощении устройства и повышении его надежности без потери качества измерений, в расширении области его применения, а также уменьшении его габаритов, веса и повышении удобства эксплуатации.
Поставленная задача решается устройством, состоящим из измерительно-регистрационного блока и узла подвеса, закрепленного на жестком носителе и обеспечивающего вращение измерительно-регистрационного блока вокруг двух ортогональных осей, при этом измерительно-регистрационный блок уравновешен относительно горизонтальной оси узла подвеса по собственному весу и плавучести и состоит из аппаратурного блока в виде герметичного корпуса, оборудованного винтовыми лопастями и установленного с возможностью вращения вокруг своей продольной оси в рамке с направляющими лопастями, при этом аппаратурный блок включает датчики ориентации в виде двухосевого датчика отклонения от вертикали и трехосевого электронного компаса, цифровую систему обработки и записи сигналов и автономный источник электропитания.
На Фигуре приведена схема одного из возможных вариантов реализации предлагаемого устройства, где 1 - аппаратурный блок, 2 - винтовые лопасти, 3 - источник электропитания, 4 - датчики ориентации, 5 - управляющий микроконтроллер, 6 - устройство памяти; 7 - рамка измерительно-регистрационного блока, 8 - направляющие лопасти рамки, 9 - промежуточная рама узла подвеса; 10 - внешняя рама узла подвеса; 11 - жесткий носитель.
Рамка (7) измерительно-регистрационного блока под действием набегающего потока при помощи установленных на ней направляющих лопастей (8) обеспечивает ориентацию продольной оси Х аппаратурного блока (1) по направлению течения жидкости и возможность вращения аппаратурного блока (1) вокруг оси Х под действием набегающего потока посредством винтовых лопастей (2).
Узел подвеса (9, 10), обеспечивающий свободное вращение измерительно-регистрационного блока (1-8) вокруг двух ортогональных осей Y и Z, может быть выполнен по любой приемлемой для этой цели схеме, например, с использованием схемы карданного подвеса или шарниров равных угловых скоростей. Узел подвеса (9, 10) механически обеспечивает возможность самоориентации измерительно-регистрационного блока (1-8) по потоку по двум пространственным координатам (по осям Y и Z). При этом измерительно-регистрационный блок уравновешен относительно горизонтальной оси узла подвеса по собственному весу и плавучести, например, при помощи уравновешивающих поплавка и груза, которые могут быть размещены как на аппаратурном корпусе (1), так и на рамке (7).
Винтовые лопасти (2) обеспечивают вращение аппаратурного блока (1) вокруг оси Х с угловой скоростью, пропорциональной скорости течения.
Все датчики (4) ориентации размещены в аппаратурном блоке (1) неподвижно по отношению друг к другу и корпусу и положение блока (1) и датчиков (4) измеряется непосредственно относительно магнитного и гравитационного полей в точке измерения.
Система (4-6) измерения, обработки и записи сигналов, обеспечивающая работу устройства, выполнена на базе управляющего микроконтроллера (5) и энергонезависимой памяти (6) и включает плату электроники с установленными электронными схемами, а также датчики ориентации (4): двухосевой датчик отклонения от вертикали и датчик отклонения от направления магнитного поля в виде трехосевого электронного компаса.
В качестве датчика отклонения от вертикали может быть применен двухосевой инклинометр, например SCA100T-D02 производства VTI Technologies, обеспечивающий точность измерения углов отклонения от вертикали 0,2º в диапазоне температур 0…+60ºС. Для измерения углов отклонения от вектора магнитного поля используют трехосевой электронный магнитный компас, выполненный, например, в виде пары компасных модулей Honeywell HMC 6352, обеспечивающих точность измерения 2,5º. Энергонезависимая память может быть реализована на основе SD или ММС card или в виде микросхемы памяти. Для электропитания всех схем может быть использован, например, батарейный источник питания типоразмера С (R14).
Устройство работает следующим образом.
Набегающий поток жидкости, воздействуя на направляющие лопасти (8) рамки (7), ориентирует измерительно-регистрационный блок (1-8) по направлению потока жидкости, то есть аппаратурный корпус (1) ориентируется строго по набегающему потоку жидкости и независимо от направления потока частота его вращения вокруг оси Х за счет винтовых лопастей (2) пропорциональна модулю скорости течения. Соответственно, скорости течения потока пропорциональна также и частота сигнала датчика отклонения от вертикали (2-осевого инклинометра) по оси Y. Управляющий микроконтроллер (5) цифровой системы измерения и записи сигналов производит опрос датчиков ориентации (4), предварительную обработку полученной информации и ее запись в память (6).
Заявляемое устройство основано на том, что для измерения модуля скорости течения использован импульсный сигнал с частотой следования импульсов, пропорциональной модулю скорости течения, который может быть получен с датчика отклонения от вертикали, если этот датчик вращается вместе с корпусом аппаратурного отсека. Поскольку для точного расчета азимута течения датчик отклонения от вертикали должен быть жестко связан с магнитным компасом и другими элементами схемы - вращаться должен весь аппаратурный блок. С этой целью аппаратурный корпус (1) со всеми датчиками и измерительной электроникой выполнен в виде корпуса-вертушки с винтовыми лопастями, вращающимся со скоростью, пропорциональной скорости течения, и установлен на рамке (7) с возможностью вращения вокруг своей продольной оси, при этом ось его вращения ориентируется вдоль течения при помощи направляющих лопастей (8) рамки (7).
Такая конструкция не требует внешних электрических соединений, настройки отдельного датчика модуля скорости течения под характеристики электропроводности жидкости - заявляемое устройство может работать в потоке любой жидкости или газа. Отсутствие сложных механических узлов и электронных схем передачи питания и данных через герметичные вращающиеся соединения упрощают устройство, повышают его надежность и снижают потребляемую им мощность, что актуально для автономных устройств.
Заявляемое устройство за счет узла подвеса и наличия датчиков ориентации: датчика отклонения от направления магнитного поля в виде трехосевого электронного компаса и датчика отклонения от вертикали, способно самоориентироваться в водном потоке по азимуту и углу места, измерять и учитывать вертикальную составляющую течения при определении скорости и направления течения жидкости.
Измерение положения корпуса измерительно-регистрационного блока производится непосредственно относительно магнитного и гравитационного полей в точке расположения заявляемого устройства.
Измерение модуля скорости течения производится путем обработки сигнала инклинометра (датчика отклонения от вертикали), соответствующего оси Y инклинометра, перпендикулярной продольной оси измерительно-регистрационного блока X.
Предлагаемое устройство может быть использовано для более глубокого и детального изучения процессов в водном слое, так как дает непосредственную информацию о перемещениях водных масс, обеспечивает измерение как горизонтальных, так и вертикальных составляющих скорости течения, в том числе параметров приливных течений и орбитального движения частиц воды во внутренних волнах, а также смещение водных масс в приповерхностном слое под воздействием поверхностных волн, что также позволяет расширить функциональные возможности заявляемого устройства.
Таким образом, предлагаемая конструкция устройства за счет того, что измерение модуля скорости течения производится не за счет установки отдельного датчика скорости, а с использованием нового подхода к измерению скорости потока, основанного на использовании для измерения модуля скорости сигнала датчика отклонения от вертикали, соответствующего оси инклинометра, перпендикулярной продольной оси аппаратурного блока, позволила добиться упрощения устройства и повышение его надежности без потери качества измерений, расширить область его применения, уменьшить габариты, вес и повысить удобство эксплуатации.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ СКОРОСТИ И НАПРАВЛЕНИЯ ТЕЧЕНИЯ ЖИДКОСТИ | 2009 |
|
RU2413232C2 |
| Система для мониторинга искусственных сооружений высокоскоростной магистрали | 2018 |
|
RU2698419C1 |
| СПОСОБ КАЛИБРОВКИ ТРЁХОСЕВОГО ЭЛЕКТРОННОГО МАГНИТНОГО КОМПАСА | 2022 |
|
RU2788825C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ СКВАЖИННОГО ПРИБОРА В БУРОВОЙ СКВАЖИНЕ | 2011 |
|
RU2482270C1 |
| СПОСОБ И УСТАНОВКА ДЛЯ НАЗЕМНОЙ РЕГИСТРАЦИИ СЕЙСМИЧЕСКИХ ДАННЫХ | 2004 |
|
RU2352960C2 |
| ИНКЛИНОМЕТР (ВАРИАНТЫ) | 1998 |
|
RU2134427C1 |
| СПОСОБ НАЧАЛЬНОЙ АЗИМУТАЛЬНОЙ ВЫСТАВКИ СКВАЖИННОГО ПРИБОРА ГИРОСКОПИЧЕСКОГО ИНКЛИНОМЕТРА И АЗИМУТАЛЬНЫЙ МОДУЛЬ | 2012 |
|
RU2501946C2 |
| ПОДВИЖНЫЙ МОРСКОЙ АППАРАТ ДЛЯ ПОДВОДНЫХ ИССЛЕДОВАНИЙ | 2011 |
|
RU2478059C1 |
| ГИРОИНЕРЦИАЛЬНЫЙ МОДУЛЬ ГИРОСКОПИЧЕСКОГО ИНКЛИНОМЕТРА | 2012 |
|
RU2528105C2 |
| Электронный компас для подвижного объекта | 2024 |
|
RU2829808C1 |
Устройство предназначено для определения скорости и направления течения жидкости и газа и может быть использовано как для проводящих, так и для непроводящих сред. Устройство состоит из измерительно-регистрационного блока и узла подвеса, закрепленного на жестком носителе и обеспечивающего вращение измерительно-регистрационного блока вокруг двух ортогональных осей. Измерительно-регистрационный блок уравновешен относительно горизонтальной оси узла подвеса по собственному весу и плавучести и состоит из снабженного винтовыми лопастями аппаратурного блока и рамки с направляющими лопастями. Аппаратурный блок установлен в рамке с возможностью вращения вокруг своей продольной оси и включает датчики ориентации в виде двухосевого датчика отклонения от вертикали и трехосевого электронного компаса, цифровую систему обработки сигналов и автономный источник электропитания. Технический результат - упрощение устройства и повышение его надежности без потери качества измерений, расширение области его применения, уменьшение габаритов, веса и повышение удобства эксплуатации. 1 ил.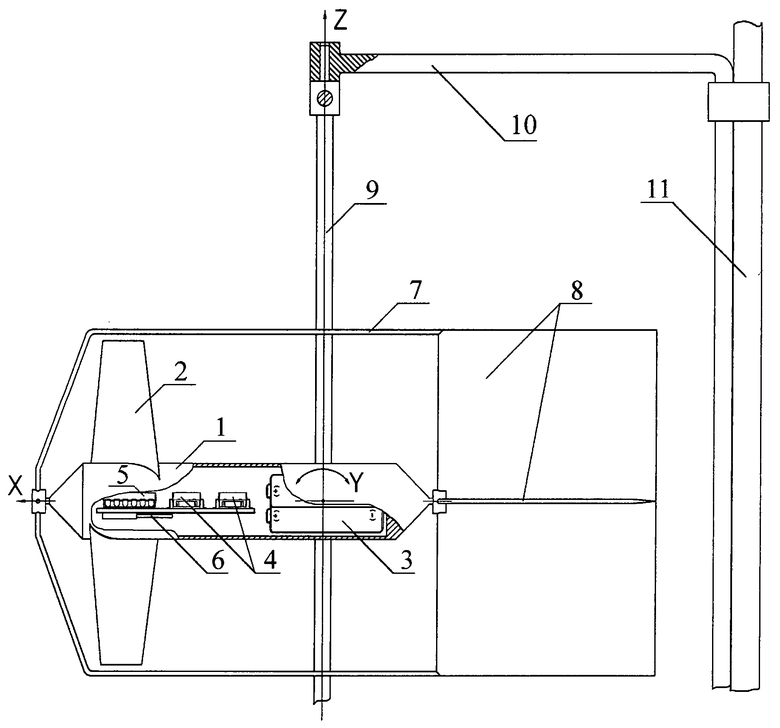
Устройство для регистрации скорости и направления течения жидкости и газа, включающее блок записи информации, узел подвеса, закрепленный на жестком носителе, направляющие лопасти и аппаратурный блок в виде герметичного корпуса, выполненного с возможностью вращения вокруг продольной оси и включающего систему измерения и обработки сигналов, состоящую из датчиков направления в виде двухосевого датчика отклонения от вертикали и трехосевого электронного компаса и цифровой системы обработки сигналов, отличающееся тем, что корпус дополнительно оборудован винтовыми лопастями и установлен в рамке, снабженной направляющими лопастями, образуя измерительно-регистрационный блок, установленный в узле подвеса, обеспечивающем вращение измерительно-регистрационного блока вокруг двух ортогональных осей, при этом измерительно-регистрационный блок уравновешен относительно горизонтальной оси узла подвеса по собственному весу и плавучести, а блок записи информации установлен в аппаратурном блоке, дополнительно снабженном автономным источником электропитания.
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ СКОРОСТИ И НАПРАВЛЕНИЯ ТЕЧЕНИЯ ЖИДКОСТИ | 2009 |
|
RU2413232C2 |
| Устройство для измерения и регистрации скорости и направления течений | 1983 |
|
SU1164605A1 |
| CN 101187672 A, 28.05.2008 | |||
| СВЕТОДИОДНЫЙ СТРОИТЕЛЬНЫЙ ЭЛЕМЕНТ | 2020 |
|
RU2751309C1 |

