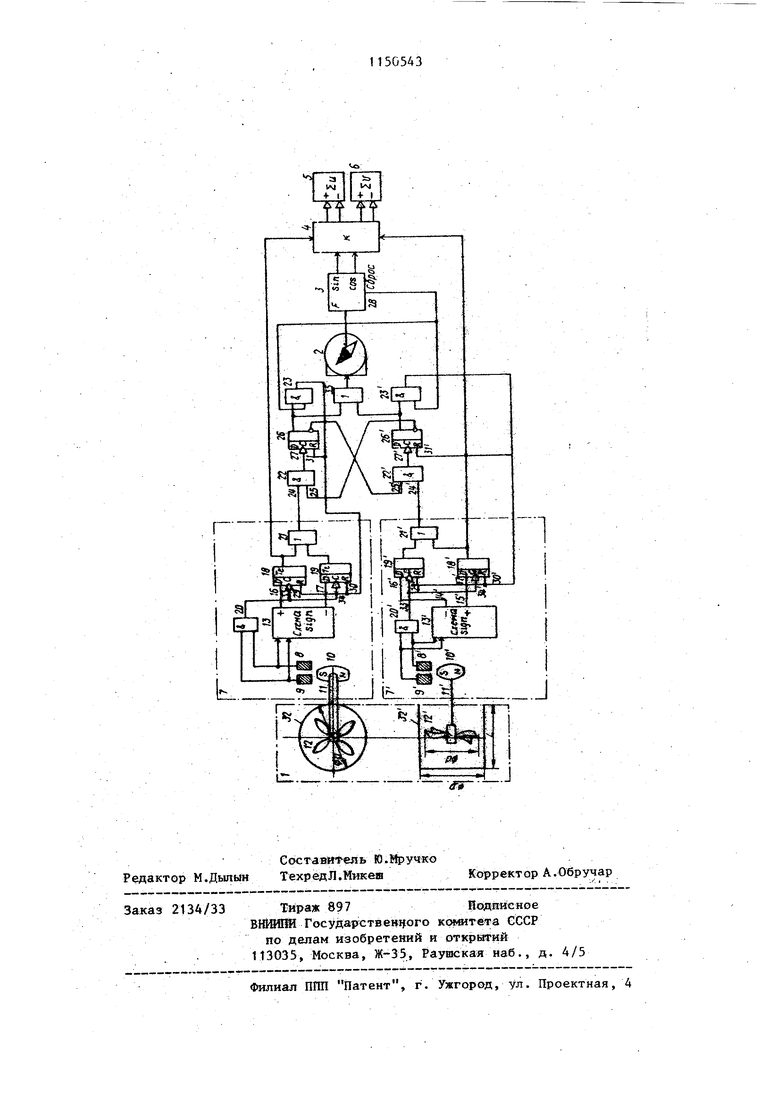
Изобретение относится к гидро-мепеоприборостроению и может быть использовано при создания средств измерения скорости океанического течения. Известно устройство, содержащее датчик скорости течения, выполненны в виде ротора Савониуса, датчик пол жения флюгарки и датчик частоты вращения ротора jjj , Недостатком данного устройства является то, что инерционность флю ки не позволяет точно измерять направление течения в турбулированных верхних слоях океана, Наиболее близким по технической сущности и достигаемому результату к изобретению является устройство двухкомпонентного импеллерного дат чика, содержащего два импеллерных датчика скорости течения, магнитного компаса, соединенного через синусно-косинусный формирователь и коммутатор с сумматорами, и двух блоков фиксирования оборота и направления вращения импеллеров, содержащего два магниточувтствительн элемента и магнит, закрепленный на оси вращения импеллера, и схему знака 2J , Недостатками известного устройства являются низкая точность изме рения скорости течения и неоднозна ность снимаемого сигнала. Цель изобретения - повышение точности измерения и упрощение кон струкции устройства, предназначенного для измерения скорости движения воды в океане с помощью систем буйковых станций. . Поставленная цель достигается тем, что в устройство для измерени скорости морских течений, состояще из двухкомпонентного импеллерного датчика скорости течения, магнитного компаса, соединенного через с нусно-косинусный формирователь и коммутатор с сумматорами, и двух блоков фиксирования оборотов и нап ления вращения импеллера, включающий два магниточувствительных элемента, магнит, закрепленный на оси вращения каждого импеллера, и схем знака, дополнительно введены два триггера памяти и две пары ключей каждая из коч-орььч по входу одного из ключей И подк.гп-)чоиа через элеме ШИ блока (liMKi-Mjuiii I.боротой и направления вращения импеллеров к пряMf iM выходам исполнительных триггеров, а другие входы этих ключей связаны с инверсными выходами триггеров памяти, через тактовые входы и прямые выходы KOTopt ix соединены между собой ключи из другой пары, при этом вторые ключи И каждой пары по входу связаны с шиной Сброс сину :но-косинусного формирователя, а по выходу - с R-входами исполнительных триггеров и триггеров Памяти, прямые выходы которых через элемент Ш1И поданы на включение магнитного компаса, при этом одновременно в каждый блок фиксирования оборотов и направления вращения импеллера введены по дополнительному ключу И, через которые выходы обоих магниточувствительных элементов каждого блока подключены на тактовые входы исполнительных: триггеров, а их D-входы соединены с различными выходами схемы знака, а выходы - с управляющими входами коммутатора, причем магниточувствительные элементы расположены вплотную друг к другу вдоль окружности вращения магнита, образуя единый магниточувствительный элемент с четырьмя состояниями . В результате обеспечения круговой диаграммы направленности определения знаков компонент скорости течения измерение каждой компоненты происходит без инструментальных погрешностей. Одновременное исключение указанных погрешностей и потерь информации об этих компонентах при их дальнейшей обработке согласно алгоритму векторного осреднения повышает точность измерения скорости движения воды. Наряду с этим отказ от измерения в датчике скорости течения сдвоенных импеллеров позволяет достигнуть более простой (по сравнению с прототипом) конструкции устройства в целом. На чертеже показана-функциональная схема предлагаемого устройства для измерения скорости морских течений. Данное устройство состоит из двухкомпонентного импеллерного датчика 1 скорости течения, магнитного компаса 2, соединенного через синусно-косинусный формирователь 3 3 . и коммутатор 4 с cyMMaTopaNrn 5 и 6 В состав устройства также входят два блока 7 и У фиксирования оборота и направления вращения HNmejmepa Каждый из блоков 7 и 7 включает в себя соответственно по два магниточувствительных элемента 8, 9 и 8 , 9 по одному магниту 10 и 10 , установленные на осях вращения 11 и 11 импеллеров 12 и 12 , а также по схеме знака 13 и 13. Различные выходы 14, 15 и 14, 15 этих схем соединены соответственно с D-входами 16, 17 и 16 , 17 исполнительных триггеров 18, 19 и 18, 19, входягдах в эти блоки. Кроме того, в их состав входят по дополнительному ключу. И 20 или 20 , а выходы этих триггеров 18, 19 и 18, 19 объединены соответственно на элементах ИЛИ 21 и 21 . Одновременно выходы триггеров 18 и IB соединены с управляющими входами коммутатора 4. В состав устройства также входят две пары ключей И 22, 23 и 22 , 23 каждая из которых по входу 24 или 24 первого из ключей И 22 или 22 подключена к элементу ИЛИ 21 и 21 , а другие входы 25 и 25 этих ключей 22 и 22 связаны соответственно с инверсными выходами триггеров памяти 26 и 26. Тактовые входы 27 и 27 этих триггеров соединены соответстве но с выходами первых ключей 22 и 22 уже из другой пары. При этом вто рые ключи И 23 и 23 на каждой пары по входу связаны с шиной Сброс 28 синусно-косинусного формирователя 3 а по выходу - с R-входами 29, 30 и 29, 30 исполнительных триггеров, та, 19, 18, 19 и входами 31 и 31 триггеров памяти 26 и 26, прямые выходы которых поданы на другие входы соответственно ключей 23 и 23 , а также через элемент Ш1И на включение магнитного компаса 2. Одновременно магниточувствительные элементы 8, 9 и 8, 9 установлены попарно вплотную друг к другу вдоль окружности вращения магнитов 11 и 11 , образуя попарно единый магниточувствитепьньсй элемент с четырьмя состояниями. При этом каждый из импеллеров 12 и 12 двухкомпонентного датчика 1 скорости течения снабжен цилиндрическим обтекателем 32 и 32 соответственно, диаметр кот рого связан с диаметром импеллера 43Л формулой ci П i 1,1 d, а его длина L 5-0,9 d. При этом чмпеллпр 12 или 12 установлен соосно внутри обтекателя 32 и 32 на равном расстоянии от его обоих концов. Устройство работает следующим образом. При движении потоков воды через датчик 1 скорости происходит вращение его импеллеров 12 и 12. Одновременно совершают вращение магниты 10 и 10 , жестко закрепленные на их осях 11 и 11 вращения. В результате происходит срабатывание магнит.очувствительных элементов 8, 9 и 8 , 9 , расположенных в блоках 7 и 7 фиксирования оборота и направления вращения импеллеров. Ввиду того, что магниточувствительные элементы 8, 9 и 8 , 9 попарно расположены вплотную друг к другу вдоль окружности вращения магнитов 10 и 10,при определенном положении магнита 10 и 10 имеет место одновременное срабатывание обоих магниточувствительных элементов 8, 9 или 8, 9 . В итоге каждые два рядом расположение магниточувствительные элементы, представляют собой единый магниточувствительный элемент с четырьмя раздельными состояними. Это позволяет схеме знака 13 или 13 путем логического анализа сигналов, поступающих с 8, 9 или 8, 9 5 .однозначно определять направление вращения того или иного импеллера 12 или 12 при любых вариациях скорости и направления движения. Допустим, один из импеллеров 12 или 12 совершил поворот на фиксированную величину угла, в данном случае равную 2 , и занял положение, при котором происходит одновременное срабатывание обоих магниточувствительных элементов 8, 9 или 8, 9. Тогда на выходе 14 или 15, либо 14 или 15 схемы знака 13 или 13 в зависимости от направления вращения импеллера 12 или 12 появляется сигнал 1, который далее поступает на входы 16, 16 или 17,17 исполнительных триггеров 18,18 или 19, 19. В результате по сигналам с выхода ключа И20 или 20происходит установка по тактовым входам 33 или 33% либо 34 или 34 соответствующего исполнительного триггера 18 или 18, либо 19 или 19, С выходов этих исполнительных триггеров сигналы поступают далее через элементы ИЛИ 21 и 21: на выходе 24 и 24 ключей 22 и 22 . Дальнейшее прохождение этих сигна лов осуществляется только в том случае, если обработка ранее поступившей информации о совершении импеллером поворота на фиксированную величину угла уже закончилась. Тогда ключи 22 и 22 по своим вторым входам 25 и 25 открыты и триггеры памяти 26 и 26 по своим тактовым вхо дам 29 и 29 устанавливаются в сост яние Q 1. При этом установка в это состояние конкретного триггера 26-или 26 зависит от того, какой из импеллеров 12 или 12 соверишт оборот на фиксированную величину угла. Далее сигнал с выхода триг гера памяти 26 или 26 поступает через элемент ИЛИ 35 на включение магнитного компаса 2, В результате измеряется компасный угол и тем самым определяется положение датчика скорости течения относительно магнитного меридиана. По сигналу с выхода магнитного компаса 2 синуснокосинусный формирователь 3 вырабаты вает дне серии импульсов с числом ИМПУЛЬСОВ в каждой из них, пропорци налькым синусу и косинусу компасног угла. Далее эти импульсы поступают на коммутатор 4, распределяющий их по сумматорам 5 и 6 широтной и меридиональной составляющих среднего вектора скорости течения в соответствии с алгоритмом векторного осреднения, описанным в 2J , При этом сигналы, управляющие работой коммутатора 4, поступают на его управляющие входы с выходов соответствующих исполнительных триггеров 18. или IB. Тем самым осуществляетс приведение единичных отрезков пути пройденных потоком воды мимо датчика 1 , к географическим координатам. По окончании этих серий импульс синусно-косинусный формирователь 3 на своем выходе 28 Сброс вырабат вает сигнал, который, проходя чере ключ И 23 или 23, срабатывает три гер памяти 26 или 26 по его R-BXO ду 31 или. 31, а также исполнитель ные триггеры 18, 19 или IS, 19- , по их R-входам 29, 30 или 29, ЗП В противном случае, если поворот импеллера на фиксированную величину угла будет совершен до окончания обработки информации с другого импечлера, ключи 22 или 22 будут закрыты по своим входам 25 и 25 сигналами с инверсных выходов соответствующих триггеров памяти 26 и 26 до окончания формирования серий импульсов на выходах формирователя 3. Только после появления сигнала Сброс на выходе 28 ключ 22 или 22 откроется и переключится соответствующий триггер 26 или 26. Затем уже происходит включение компаса 2 и дальнейшая работа всего устройства по приведению единичных отрезков пути, пройденных частицами воды, к географическим координатам согласно указанной последовательности. Таким образом, информация о совершении импеллером поворота на фиксированную величину угла не теряется, вне зависимости от момента ее появления. Это позволяет фиксировать все перемещения потока воды на единичный отрезок пути, В результате исключаются потери точности измерения при одновременном повороте обоих импеллеров 12 и 12 на фиксированную величину угла. За счет этого при |синхронном вращении импеллеров при расположении вектора скорости течения под углом I /4 к их осям вращения погрешность измерения модуля вектора скорости будет уменьшена на 40%, а аргумента на 45 . В процессе проведения измерений движение воды может быть направлено под углом к осям вращения импеллеров 12 и 12 двухкомпонентного датчика 1 скорости течения. Наличие боковой составляющей скорости оказывает на импеллер тормозящее действие, ухудшающее его компонентные свойства. Для их улучшения каждый из импеллеров 12 и 12 устанавливается симметричным образом внутри цилиндрического обтекателя 32 и 32 , снижающего тор- мозящее действие боковой составляющей скорости. Экспериментально установлено, что наилучшее приближение диаграммы направленности двухкомпонентного датчика 1 к круговой при требуемом объеме пространственного осреднения скорости течения достигается при следующих соотношениях диаметра D и длины L обтекателя 32
711505АЗ8
и 32 и диаметра d импеллера 12ности измерения в результате исклю-
или 12:чения потерь информащ н об обоих
i 1,1 L 0,9 d.новременном упрощении коиструкщ1И
Таким образом, в предложенном уст-каза от применения в нем сдвоенных
ройстве достигается повышение точ-импеллеров.
компонентах скорости течения при од5датчика этого устройства за счет от

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения скорости и направления течения | 1987 |
|
SU1520451A1 |
| Система для проведения испытаний турбины | 1989 |
|
SU1636706A1 |
| Способ измерения магнитного курса подвижного объекта и устройство для его осуществления | 2017 |
|
RU2653599C1 |
| Самонастраивающееся устройство управления | 1983 |
|
SU1130830A1 |
| Устройство для управления рабочими органами рыборазделочной машины | 1978 |
|
SU736932A1 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ВРАЩЕНИЯ ВАЛА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2017156C1 |
| Способ измерения параметров скорости течения и устройство для его осуществления | 1990 |
|
SU1793380A1 |
| НАКЛОННО-ПОВОРОТНЫЙ СТЕНД | 2004 |
|
RU2277697C1 |
| Задающее устройство следящего электропривода | 1982 |
|
SU1056129A1 |
| Феррозондовый компас | 1987 |
|
SU1569547A1 |
УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СКОРОСТИ МОРСКИХ ТЕЧЕНИЙ, состоя.щее . из двухкомпонентного импеллерного датчика скорости течения, магнитного компаса, соединенного через синуснокосинусный формирователь и коммутатор с сумматорами, и двух блоков фиксирования оборотов и направления вращения импеллера, включающий два . магниточувствительных элемента, магнит, закрепленный на оси вращения каждого импеллера, и схему знака, отличающееся тем, что, с целью повышения точности измерения и упрощения устройства в него дополнительно введены два триггера памяти и две пары ключей И, каждая из которых по входу одного из ключей И подключена через элемент ИЛИ блока фиксации оборотов и направления вращения импеллеров к прямым выходам исполнительных триггеров, а другие входы этих ключей связаны с инверсными выходами триггеров памяти, через тактовые входы и прямые выходы которых соединены между собой Ю1ЮЧИ из другой пары, при этом вторые ключи И каждой пары по входу связаны с шиной Сброс синуснокосинусного формирователя, а по выходу - с R-входами исполнительных триггеров и триггеров памяти канала соответствующего импеллера, прямые выходы триггеров памяти через элемент ИЛИ подключены на вход вклкг(О чения магнитного компаса, при этом С одновременно в каждый блок фиксиро- вания оборотов и направления вращения импеллера введены по дополнительному ключу И, через которые выходы обоих магниточувствительных элементов каждого блока рдключены на тактовые входы исполнительных триггеров, а их D-входы соединены с различными выходами схемы знака, а выходы - с ел .управляющими входами коммутатора, j: шричем магниточувствительные элементы расположены вплотную друг к другу э - вдоль окружности вращения магнита.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для автоматического измерения параметров морских течений | 1973 |
|
SU468153A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Патент США № 4152934, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
