1
Изобретение относится к технике радиоизмерений.
Известен преобразователь вектора Умова-Пойтинга, содержащий датчик электрической компоненты электромагнитного поля и датчик магнитной компоненты электромагнитного поля, усилитель и регистратор ilОднако известный преобразователь имеет низкую точность и чувствительность.
Цель изобретения - повышение точности и чувствительности.
Для этого в преобразователе вектора Умова-Пойтинга, содержащем датчик .электрической компоненты электромагнитного поля и датчик магнитной компоненты электромагнитного поля, усилитель и регистратор, датчик электрической компоненты состоит из двух соосных стержней-концентраторов электрического поля с последовательно соединенными приемными катушками, связанными между собой с помощью электрического модулятора, а датчик магнитной компоненты выполнен в виде соосных стержней-концентраторов магнитного поля с последовательно соединенными приемными катушками, и Связанных между собой с помощью
магнитного модулятора, при этом концы приемных -катушек датчика магнитной компоненты подключены к входам усилителя, выход которого соединен с электрическим модулятором, концы приемных катушек датчикаэлектрической компоненты подключены к входам регистратора, третий вход которого соединен с выходом введенного
10 возбуждающего генератора, другой выход которого соединен с магнитным модулятором, а оси датчиков электрический и магнитной компонент взаимно-перпендикулярны.
15
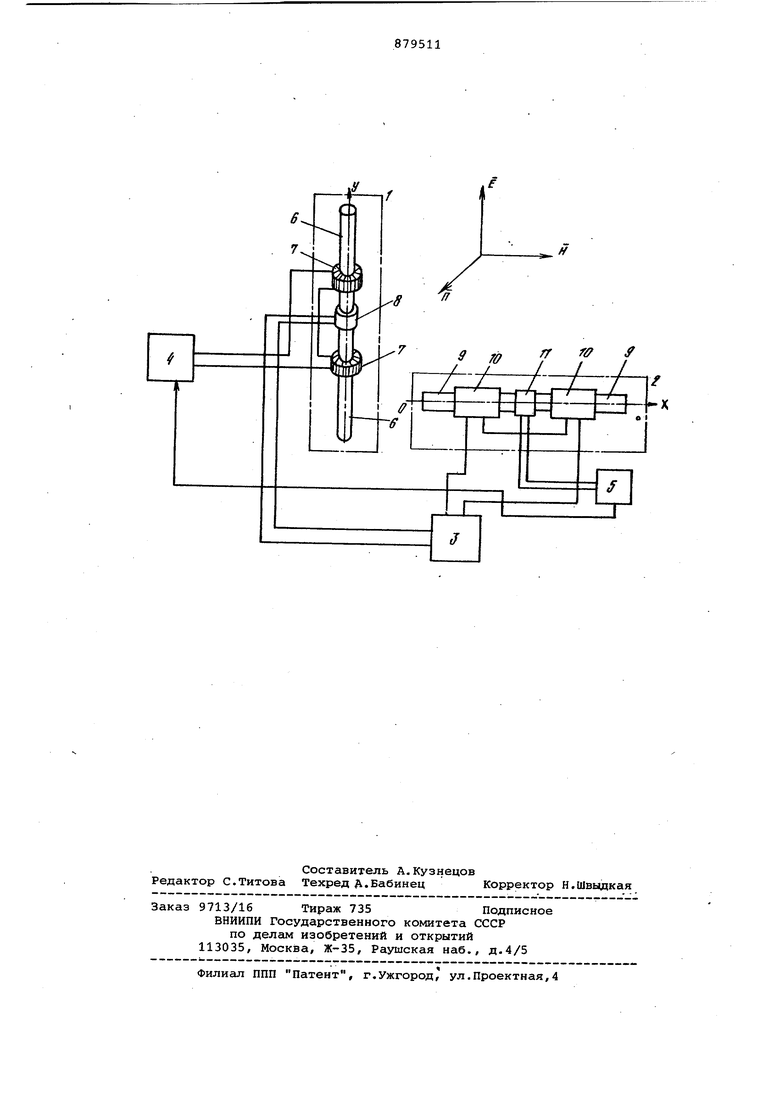
На чертеже приведена функциональная схема преобразователя.
Преобразователь вектора УмоваПойтинга содержит датчик 1 электрической компоненты электромагнитного
20 поля и датчик 2 магнитной компоненты электромагнитного поля, усилитель 3, регистратор 4 и возбуждающий генератор 5, причем датчик 1 электрической компоненты состоит из соосных стерж25 ней-концентраторов б электрического поля с,последовательно соединенными приемными катушками 7, связанными между собой с помощью электрического модулятора 8, а датчик 2 магнитной
30 компоненты выполнен в виде соосных стержней-концентраторов 9 магнитного поля с доследовательно соединенными приемными катушками 10 и связанных между собой с помощью магнитного г дулятЪра 11 г при этом конщл прием ных катушек 10 датчика 2 магнитной компоненты подключены к входам усилителя 3, выход которого соединен с электрическим модулятором 8, концы приемных катушек 7 датчика 1 электрической компоненты подключены к входам регистратора 4, третий вход которого соединен с выходом возбужд ющего генератора 5, другой выход ко торого соединен с магнитным модулят ром 11, а оси датчиков 1 и 2 электрической и магнитной компонент вза имно-перпендикулярны, Преобразователь работает следующим образом. Распространяющаяся электромагнит ная волна имеет две компоненты:электрическую tCt) (i)5inS}iH магнитную H(-fc) Н (wi) Sin5lt. При возбуждении магнитного модул тора 11 датчика 2 переменным током, генерируемым возбуждающим генератором 5 с частотой tw, причем на выходе приемных катушек 10 датчи ка 2 появляется сигнал .Bi S t inceji) где Ни. проекция вектора магнитног поля на продольную ось X датчика 2 ; 1 - коэффициент пропорциональности. Это напряжение, усиливаясь в уси лителе 3, поступает на вход электри ческого модулятора 8. Выходное напряжение датчика 1 равно ,)l, где и ,.„(4;)- напряжение модуляции эл трического модулятора - проекция вектора электрического ПОЛЯ на про дольную ось датчика 1. С учетом выражения для Уд и того, ч ty./ получаем , Е,, Sin Slices cut. В регистраторе 4 при использова нии синхронного детектирования, пр меняя напряжение от возбуждающего генератора 5 в качестве опорного, исключается составляющая с частотой U) , и выходной сигнал имеет вид . Таким образом, выходной сигнал И пропорционален мгновенному значению вектора Умова-Пойтинга п в соответствующей проекции. Преобразователь по сравнению с . прототипом имеет более высокую точность и чувствительность. Формула изобретения Преобразователь вектора Умова-Пойтинга, содержащий датчик электрической компоненты электромагнитного поля и датчик магнитной компоненты электромагнитного поля, усилитель и регистратор, отличающий с я тем, что, с целью повышения точности и чувствительности, датчик электрической компоненты состоит из двух соосных стержней-концентраторов .электрического поля с последовательно соединенными приемными катушками, связанными между собой с помощью электрического модулятора, а датчик магнитной компоненты выполнен в виде соосных стержнейконцентраторов магнитного поля с последовательно соединенными приемными катушками, и связанными между собой с помощью магнитного модулятора, при этом концы приемных катушек датчика магнитной компоненты подключены к- входам усилителя, выход которого соединен с электрическим модулятором, концы приемных катушек датчика электрической компоненты подключены к -входам регистратора, третий вход которого соединен с выходом введенного возбуждающе го генератора, другой выход которого соединен с магнитным модулятором, а оси датчиков Электрической- и магнитной компонент взаимно-перпендикулярны. Источники информации, принятые во внимание при экспертизе 1.: Авторское свидетельство СССР № 574683, кл. G01R 29/08, 1977 (прототип ).

| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматические весы с электромагнитным уравновешиванием | 1987 |
|
SU1446483A1 |
| УСТРОЙСТВО ДЛЯ КАРОТАЖНЫХ ЭЛЕКТРОМАГНИТНЫХ СКАНИРУЮЩИХ ЗОНДИРОВАНИЙ | 2010 |
|
RU2421760C1 |
| Автоматические весы с электромагнитным уравновешиванием | 1986 |
|
SU1388728A1 |
| УСТРОЙСТВО ДЛЯ ЭЛЕКТРОМАГНИТНОГО КАРОТАЖА СКВАЖИН | 2001 |
|
RU2199135C1 |
| Устройство для электромагнитного каротажа | 1981 |
|
SU998995A1 |
| УЧЕБНЫЙ ПРИБОР ДЛЯ ДЕМОНСТРАЦИИ ПЕРВОГО УРАВНЕНИЯ МАКСВЕЛЛА | 2006 |
|
RU2313831C1 |
| Устройство для электромагнитного каротажа скважин | 1981 |
|
SU960701A1 |
| Трансформаторный датчик отклонения для весов с электромагнитным уравновешиванием | 1982 |
|
SU1040342A1 |
| Весы с электромагнитным уравновешиванием | 1988 |
|
SU1515065A1 |
| УСТРОЙСТВО ДЛЯ ОПЕРАТИВНОГО ОПРОБОВАНИЯ МАГНЕТИТОВЫХ РУД | 2016 |
|
RU2632265C2 |