(54) УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ СТАБШШЗАЦИИ
ПОЛОЖЕНИЯ РАБОЧЕГО ОРГАНА ДОРОЖНО-СТРОИТЕЛЬНЫХ
I
Изобретение относится к эксплуатации дорожно-строительных машин, в частноати к автоматической стабилизации положения рабочего органа в поперечной плоскости.
Известно устройство стабилизации положения рабочего органа строит ьно-дорожной машины, содержащее датчик положения рабочего органа, задатчик, релейный блок сравнения, усилители и исполнительные механизмы, в котором, с целью повьппения динамических качеств, надежности и точности устройства, к элементам устройства подключены дифференцирующее звено, дополнительный релейный блок, логический блок сравнения, инверторы, блоки временных задержек 11J.
Недостатком известного устройства является его сложность и отсутствие в основном релейном блоке регулятора чувствительности, что не позволяет регулировать точность работы МАШИН
устройства в режиме автоматической стабилизации.
Известно также устройство для автоматической стабилизации углового положения рабочего органа дорожностроительных машин, содержащее датчик и задатчик положения рабочего органа, подключенные к релейному блоку, сравнения с элементом регулирования чувствительности, и усилители, подклюг
10 ченные к исполнительному механизму 2J,
Недостатком известного устройства является появление при его работе автоколетбаний рабочего органа, что снижает надежность, долговечность и
15 качество работы устройства. Для устранения автоколебаний необходимо или увеличить нечувствительность релейного регулятора, или уменьшить скорость перемещения рабочего -органа
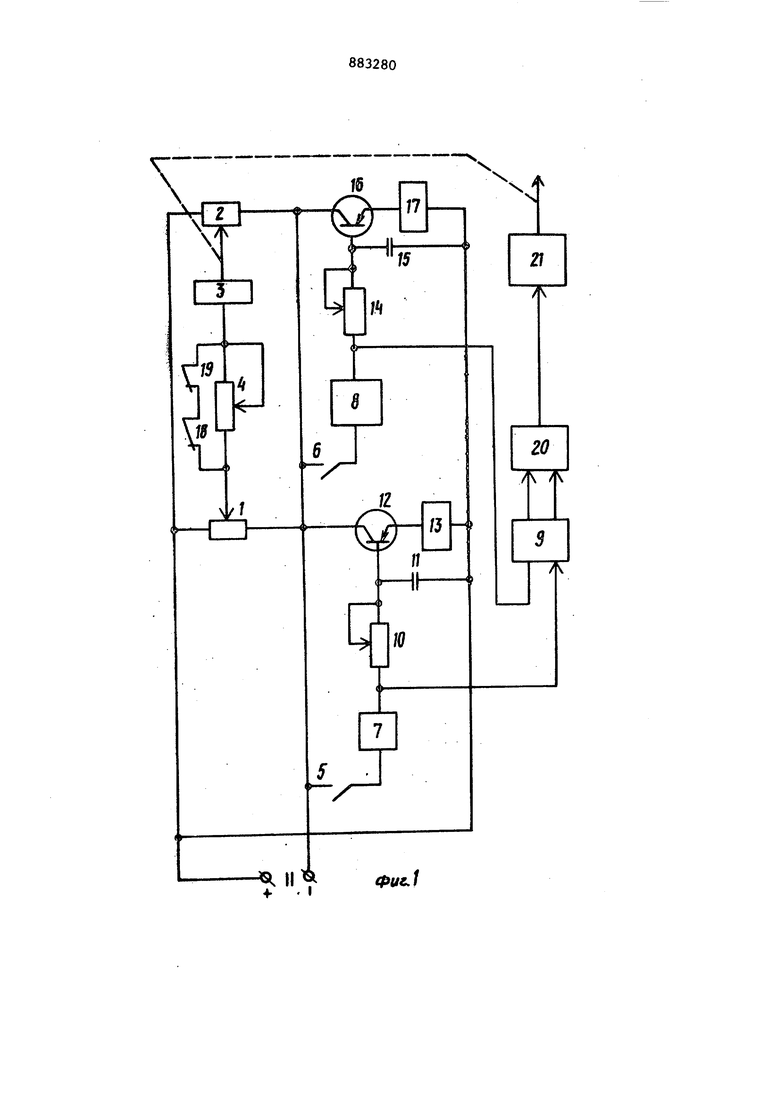
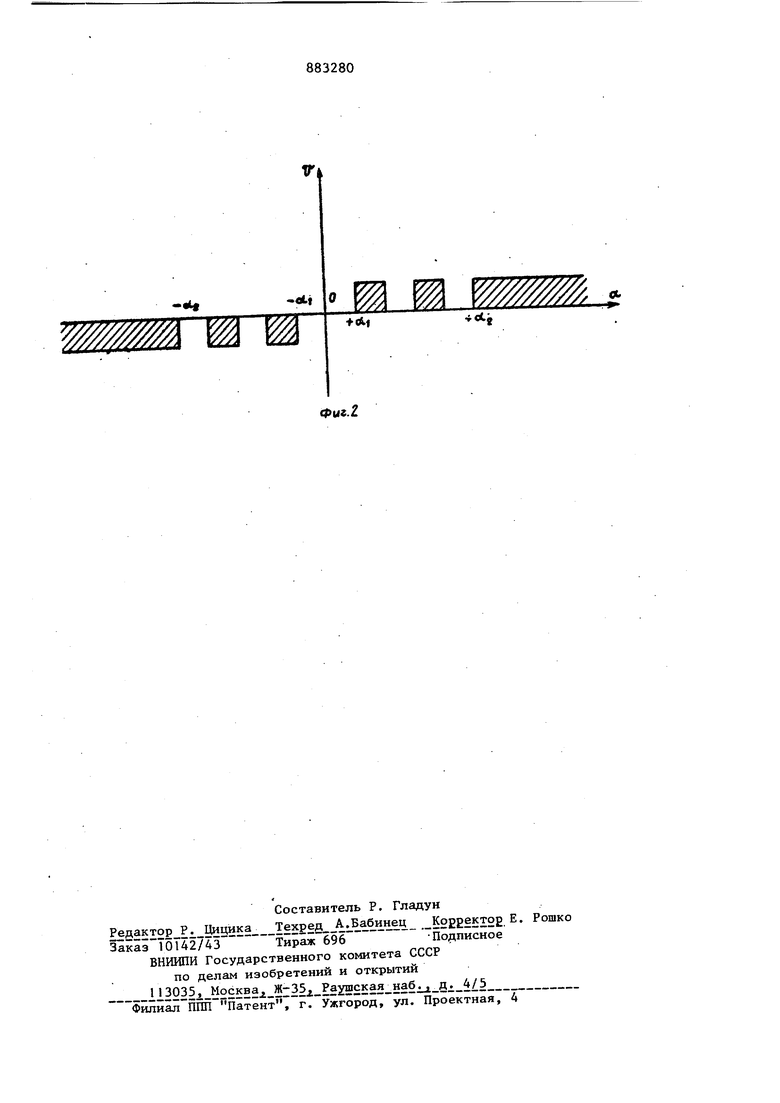
20 (например, отвала автогрейдера). Увеличение зоны нечувствительности репейного регулятора снижает точность стабилизации положения рабочего органа дорожно-строительной машины в п.опеpeMJHoft плоскости. Уменьшение скорости перемещения рабочего органа снижает производительность дорожно-стро ительной машины в режиме автоматичес кой стабилизации при заданной точности поперечного профиля планируемо поверхности. Цель изобретения - повышение устойчивости и быстродействия устройства автоматической стабилизации положения рабочего органа дорожно-стро ительных машин при сохранении максимальной точности его работы. Поставленная цель достигается тем что устройство снабжено двумя интегрируюпщми цепями, двумя транзисторами и двумя реле, причем интегрирующи цепи подключены параллельно входам исполнительного механизма, а параллельно конденсаторам интегрирующих цепей через транзисторы подключены реле, размыкающие контакты которых соединены последовательно и подключены параллельно элементу, регулирования чувствительности релейнрго бло ка Сравнения. Нафиг. 1 представлена схема устройства; на фиг. 2 -. график скорости перемещения рабочего органа в зависимости от изменения углов рассогласования , Устройство для автоматической ста билизации положения рабочего органа доролсно-строительной машины состоит из задатчика в виде потенциометра I, потенцио1 1етрического датчика 2, вклю ченного в диагональ мостовой схемы сравнения, состоящего из трехпозиционного поляризованного реле 3, пос ледовательно с которым соединен злемент регулирования чувствительности - потенциометр 4. Контакты 5 и 6 трехпозиционного реле 3 соединены с вход ми усилителей 7 и 8 соответственно, выходы которых соединены с первым и вторым входом злектрогидравлического золотника 9, исполнительного ме ханизма. Параллельно первому входу электрогидравлического золотника 9 подключена интегрирующая цепь в виде потенциометра 10, соединенного с кон денсатором 11, который соединен с ба зой транзистора 12, в эммитерную цеп которого включена обмотка реле 13. Параллельно второму входу электрогид равлического золотника 9 подключена вторая интегрирующая цепь в виде потентдиометра 14, соединенного с кон04денсатором 15, который соединен с базой транзистора 16, в эммитерную цепь которого включена обмотка реле 17. Нормально .закрытые контакты 18 и 19 реле 13 и 17 соединены последовательно и подключены параллельно потенциометру 4. Выходы электрогидравлического золотника 9 соединены с входами гидроцилиндра 20, перемещающего рабочий орган 21 (например, отвал автогрейдера) дорожно-строительной машины. Потенциометрический датчик обратной связи 2 жестко связан с рабочим органом 21 дорожно-строительной машины. Устройство для автоматической стабилизации рабочего органа дорожностроительной машины работает следующим образом. При отклонениях рабочего органа 21 дорожно-строительной машины от заданного, превыишющих зону нечувствительности t сСд (см. фиг. 2), которая определяется потенциометром 4, поляризованное реле 3 срабатывает и своим контактом 5 (6) включает усилитель 7 (8), с выхода которого сигнал подается на один из входов электрогидравлического золотника 9, который включает гидроцилиндр 20 в сторону уменьшения рассогласования мостовой схемы сравнения, скорость перемещения рабочего органа постоянна и равна ± У,. При отклонениях рабочего органа 21, превышающих зону нечувствительности оС-| поляризованного реле 3, но меньших зоны нечувствительности ± (/С, рабочий орган дорожно-строительной машины перемещается в сторону уменьшения рассогласования со скоростью tV;( дискретно, причем время включения гидроцилиндра 20, перемещающего рабочий орган 21, определяется постоянной времени интегрирующей цепи (потенциометров 10 и 14. конденсаторов 11 и 15 соответственно) Т RC, в течение которого контакт 18 (l9) реле 13 (.17)замкнут и чувствительность релейного регулятора максимальная. После заряда конденсатора II (|5) до напряжения, при котором транзистор 12 (16) открывается, реле 13 (.17) срабатывает, и контакт 18 (19) размыкается и последовательно с поляризованным реле 3 включается потенциометр 4, что увеличивает зону нечувствительности релейного регулятора до - j и поляризованное реле 3 размыкает контакт 5 (6), и гидроцилнндр 20 отключается, одновременно с выхода усилителя 7 на вход интегрирующей цепи 10и 11 15) подается сигнал О, происходит разряд конденсатора 11 (15), транзистор 12 (16) заг крывается, реле 13 (.17) обесточивается, контакт 18 (19) замыкается и. зона нечувствительности релейного регулятора устанавливается равной бС, т.е. время выключения гидроцилиндра 20 определяется временем разряда конденсатора 11 (5) интегрирующей цепи. Процесс включения и отключения гидроцилиндра повторяется пока угол отклонения рабочего органа 21 не уменьшится до величины - (С зоны нечувствительности поляризованного реле 3, т.е. максимальной чувствительности и точности релейного регулятора. Следовательно, при углах рассогласования больших зон нечувствительности сС, скорость перемещения рабочего органа постоянная и равна ± , при углах рассогласования больишх ± СХ//) , но меньших i сСа средняя скорость перемещения рабочего органа равнэ
г
1 ./г 1
где Т - время отключения гидроцилиндра;
Т„ - время включения гидроцилиндра.
Средняя скорость U при этом устанавливается потенциометрами 10 и 14, которые изменяют время Т включения гидроцилиндра. Таким образом обеспечивается максимальная точность релейного регулятора tc,) и сохраняется его устойчивость при максимальной скорости перемещения // рабочего Ьргана, соответствующей зоны нечувствительности i оСэ
83280 6
Применение устройства позволит повысить точность положения рабочего органа дорожно-строительных машин в поперечной плоскости в эксплуатационных условиях при различных скоростях его перемещения путем подбора оптимальной средней скорости при малых углах рассогласования, сохраняя ус- тойчивость релейного регулятора при 10 эксплуатационной скорости перемещения исполнительного механизма при больших углах рассогласования.
Формула изобретения
15
Устройство для автоматической ста.билизации положения рабочего органа дорожно-строительных машин, включающее датчик и задатчик положения
рабочего органа, подключенные к релейному блоку сравнения с элементом регулирования чувствительности, и усилители, подключенные к исполнительному механизму, отличающ е е с я тем, что, с целью повышения устойчивости и быстродействия устройства, оно снабжено двумя интегрирующими цепями, двумя транзисторами и двумя реле, причем интегрирующие цепи подключены параллельно входам исполнительного механизма, а параллельно конденсаторам интегрирующих цепей через транзисторы подклю чены реле, размыкающие контакты которых соединены последовательно и подключены параллельно элементу регулирования чувствительности, релейного блока сравнения.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 420737, кл. Е 02 F 9/20, 1972.
2.Скловскйй А.А. Автоматизация землеройно-планировочных машин. Рига, Лиесма. 1975 (прототип).
X
u
Ч
N
17
Hf
/5
21
/
/2 г-,
Qn
п
ч
/(/
| название | год | авторы | номер документа |
|---|---|---|---|
| Импульсный регулятор | 1977 |
|
SU737918A1 |
| Система управления рабочим органом планировочной машины | 1981 |
|
SU977621A1 |
| Управляющее устройство к землеройным машинам | 1978 |
|
SU754001A1 |
| Устройство управления рабочим органом землеройной машины | 1979 |
|
SU901415A1 |
| ЗЛЕКТРОГИДРАВЛИЧЕСКАЯ РЕЛЕЙНО-ИМПУЛЬСНА.Я СЛЕДЯЩАЯ СИСТЕМА | 1971 |
|
SU292140A1 |
| Многоканальный регулятор | 1988 |
|
SU1564586A1 |
| Устройство для автоматического вождения трактора | 1959 |
|
SU127085A1 |
| Импульсный регулятор | 1976 |
|
SU640251A1 |
| Устройство управления рабочим органом землеройно-транспортной машины | 1985 |
|
SU1342981A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1966 |
|
SU185484A1 |
./
-ett
-It
«.,
