В основном авт. св. № 178965 описан электрогидравлический следящий привод для изменения полол ения пил в обрезных станках, содержащий исполнительный гидроцилиндр, управляемый реверсивным гидрораспределителеы с электромагнитами, задающее и измерительное устройства. С целью повышения точности установки и надежности действия, привод выполнен двухскоростным с бесконтактными работающими в трансформаторном режиме сельсинами и несколькими реле, одни из которых управляют положением пил, а другие - переключением скорости перемещения.
Описываемый привод является модификацией привода по авт. св. № 178965 и позволяет повысить быстродействие и увеличить точность установки рабочих органов. Для этого он снабжен дополнительным усилителем, нагрузкой которого служит реле, переключающее привод на замедленную скорость. Вход усилителя подключен к потенциометру, включенному параллельно вторичной обмотке сельсина-трансформатора.
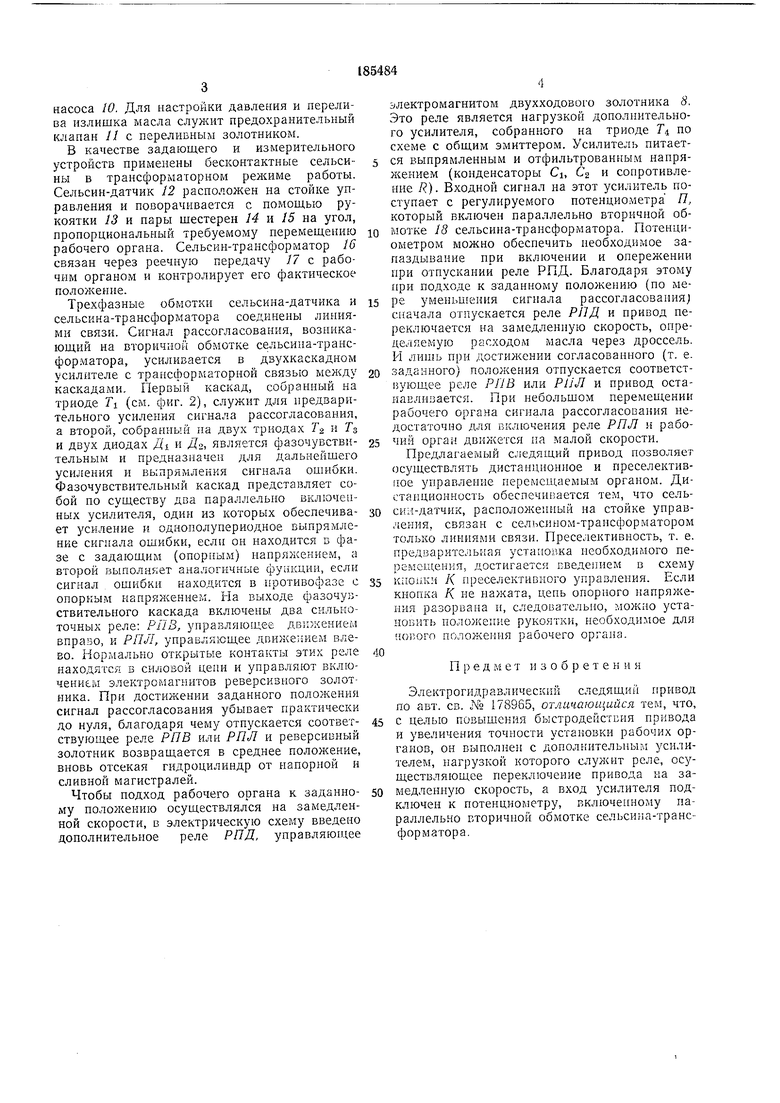
На фиг. 1 изображена гидрокинематичеекая схема описываемого привода; на фиг. 2 - принципиальная электрическая схема.
пильным суппортом обрезного станка. В качестве исполнительного органа может быть использован также гидродвигатель вращательного , связанный с перемещаемым органом с помощью винтового (винт-f -ггайка), реечного или цепного механизмов, преобразующих вращение ротора в поступательное движение.
Для управления гидроцилиндром в напорную магистраль установлен трехпозиционный реверсивный золотник 3 с электрическим управлением. Когда оба электромагнита 4 н о обесточены, золотник занимает среднее положение и отсекает гидроцилиндр от напорной и сливной магистралей, фиксируя тем самым положение рабочего органа.
Чтобы обеспечить быстродействие привода в сочетании с необходимой точностью установки перемещаемого органа, привод выполнен двухскоростным. Для этого в сливную магистраль установлены дроссель 6 с регулятором давления 7 и параллельно с ними двухходовой золотник 8, управляемый электромагнитом 9. При обесточенном электромагните 9 золотник 8 смещен пружиной вправо и перекрывает свободный слив масла в бак. В этом случае рабочая жидкость поступает на слив только через дроссель с регулятором, обеспечивая равномерную скорость медленного подвода. Система питается от лопастного
насоса 10. Для настройки давления и перелива излишка масла служит предохранительный клапан 11с. переливным золотником.
В качестве задающего и измерительного устройств применены бесконтактные сельсины в трансформаторном работы. Сельсин-датчик 12 расположен на стойке управления и поворачивается с помощью рукоятки 13 и пары щестерен 14 и 15 на угол, пропорциональный требуемому перемещению рабочего органа. Сельсин-трансформатор 16 связан через реечную передачу 17 с рабочим органом и контролирует его фактическое положение.
Трехфазные обмотки сельсина-датчика и сельсина-трансформатора соединены линиями связи. Сигнал рассогласования, возникающий на вторичной обмотке сельсина-трансформатора, усиливается в двухкаскадном усилителе с трансформаторной связью между каскадами. Первый каскад, собранный на триоде Ti (см. фиг. 2), служит для предварительного усиления сигнала рассогласования, а второй, собранный на двух триодах Т и Гз и двух диодах 4i и До, является фазочувствительным и предназначен для дальнейшего усиления и выпрямления сигнала ошибки. Фазочувствительный каскад представляет собой по существу два параллельно включенных усилителя, один из которых обеспечивает усиление к однополупериодное выпрямление сигнала ошибки, если он находится в фазе с задающим (опорным) иапряжением, а второй выполняет аналогичные функции, если сигнал ошибки находится в противофазе с опорным напряжением. На выходе фазочувствительного каскада включены два сильмоточных реле: РПВ, управляющее движением вправо, и РПЛ, управляющее движе;1ием влево. Нормально открытые контакты этих реле находятся в силовой цени и управляют включением электромагнитов реверсивного золотника. При достижении заданного положения сигнал рассогласования убывает практически до нуля, благодаря чему отпускается соответствующее реле РПВ или РПЛ и реверсивный золотник возвращается в среднее положение, вновь отсекая гидроцилиндр от напорной и сливной магистралей.
Чтобы подход рабочего органа к заданному положению осуществлялся на замедленной скорости, в электрическую схему введено дополнительное реле РЯД, управляющее
электромагнитом двухходового золотника 8. Это реле является нагрузкой дополпительного усилителя, собранного на триоде Т по схеме с общим эмиттером. Усилитель питается выпрямленным и отфильтрованным напрял ением (конденсаторы Ci, С и сопротивление R. Входной сигнал на этот усилитель поступает с регулируемого потенциометра П, который включен параллельно вторичной обмотке 18 сельснна-трансформатора. Потенциометром можно обеспечить необходиг.юе запаздывание при включении и опереженни нри отпускании реле РПД. Благодаря этому при подходе к заданному положению (по мере уменьшения сигнала рассогласования сначала отпускается реле РПД, и нривод переключается на замедленную скорость, определяемую расходом масла через дроссель. И лишь при достижении согласованного (т. е. заданного) положения отпускается соответствуЮЩее реле РПВ или РПЛ и привод останавливается. При небольшом перемещении рабочего органа сигнала рассогласования недостаточно для включения реле РПЛ рабочий орган движется на малой скорости.
Предлагаемый следящий привод позволяет осуществлять дистанционное и преселектив1юе управление перемещаемым органом. Дистанцнонность обеспечнвается тем, что сельсин-датчик, расположенный на стойке унравления, связан с сельсином-трансформатором только линиями связи. Преселективпость, т. е. предварительная устаионка необходимого перемещения, достигается введением в схему кпоики К. преселективкого управления. Если кнопка /С не нажата, цепь опорного напряжения разорвана н, следовательно, можно установить положение рукоятки, необходимое для ог;ого полох ення рабочего органа.
Пред м е т и з о б р е т е н и я
Электрогидравлический следящий привод по авт. св. № 178965, отличающийся тем, что,
с целью повышения быстродействия привода и увеличения точности установки рабочих органов, он выполнен с дополнительным усилителем, нагрузкой которого служит реле, осуществляющее переключение привода на замедленную скорость, а вход усилителя подключей к потенциометру, включенному параллельно вторичной обмотке сельсина-трансформатора.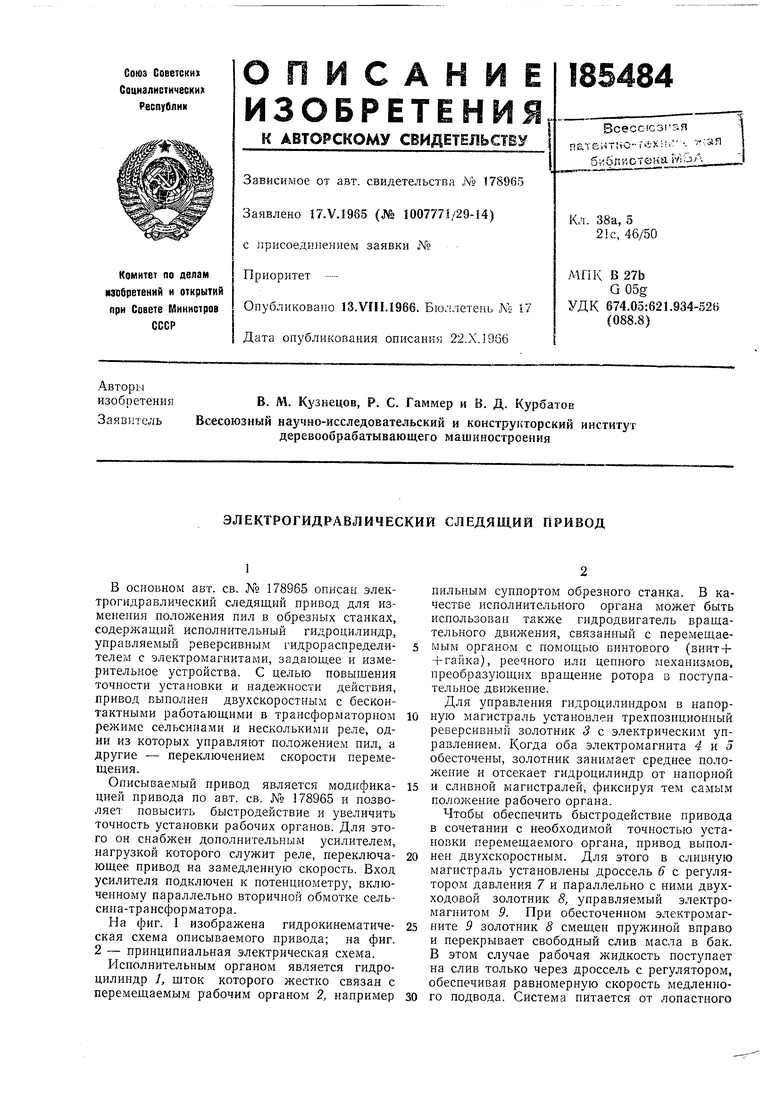
i B-n
.
.nE-..-,,
Г Л Ф C±1 1 ,-
рпл 1 ;: I
i lij J ib. f fi
итТ 1
l4r
.toi.i-.;
.гЛ4.„{ -J ;-и
..iS..
аз
i fpn/1 llH
iHl- .C,-kc.
