1
Изобретение относится к строительному, дорожному и зет леройному машиностроению, в частности к авто- ; матизированным планировочным машинам и дреноукладчикам, а также к тем машинам, в которых используется устройство управления рабочим органом, содержащее датчик положения рабочего органа, подверженный воздействию инерционных возмущений.
Известно устройство управления рабочим органом, в котором с целыо уменьшения вредного влияния ускоре-. НИИ, возникаюВщх при переключении скоростей тягача, и повышения надежности, применен датчик взйнмиого положения рам и электрический переключатель , контакил которого включены между блоком управления и датчиком угла наклона и взаимного положения рам, а обмотка управления электрического переключателя соединена через блок запаздывания с механизмом включения сцепления дизеля тягача Г 1J.
Недостатком этого устройства является то, что устранение вредного влияния ускорений происходит только в переключения скоростей тягача.
Известно устнойство управления рабочю органом землеройной машины, вк аочакицее маятниковый датчик положения, элемент сравнения, усилительпреобразователь, электрогидравличесtoкий золотник, гидроцилищф положения рабочего органа, блок задержки и ререключатель f 2 J.
Существенным недостатком этого устройства является необходимость разISделения сигнала датчика на две состав- ляюпше:полезный сигнал и сигнал помехи. Это требование либо невыполнимо вообще, ввиду совпадений спектров полезного сигнала и сигнала помехи, либо выполнимо в исключительных случаях.
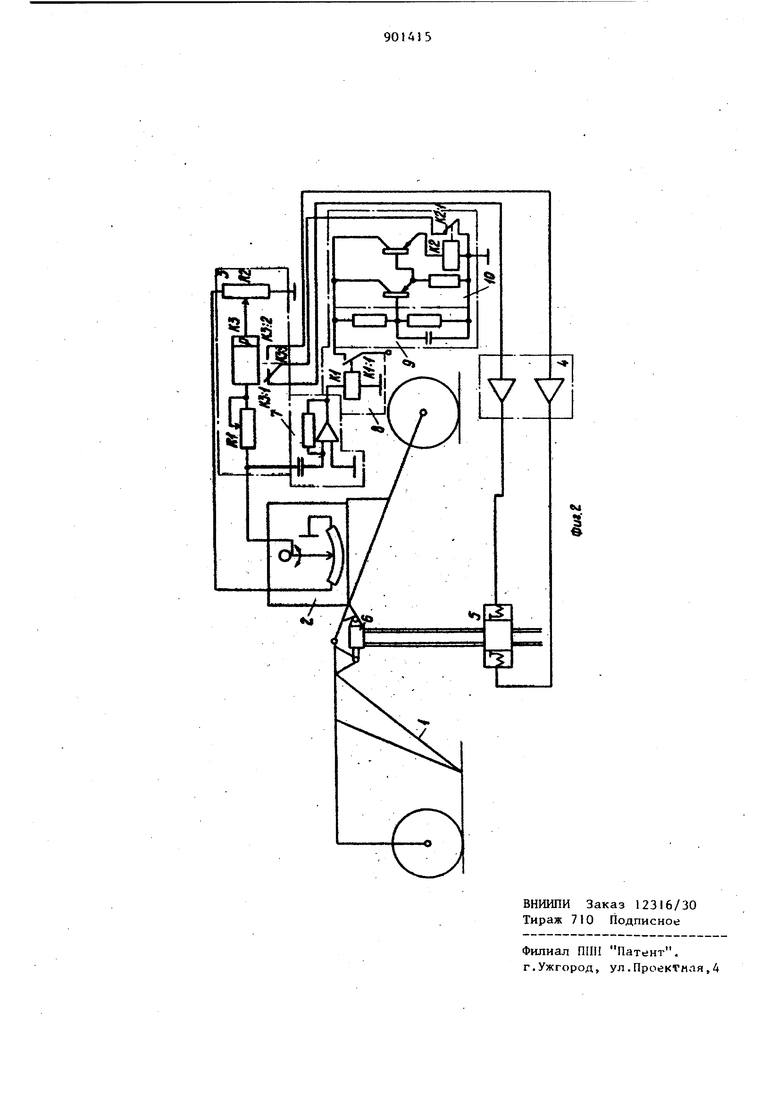
Такие случаи могут возникать, когда входной спектр характеризуетсяпреимущественно одной частотой, значительно отличающейся от частоты помехи. Однако и при этом выделение по лезного сигнала связано со значитель ными трудностями, так как речь идет об инфранизкочастотном диапазоне. К недостаткам устройства относится также и то, что разделе11ие сигналов осуществляется апериодическим звеном. Известно, что такие звенья обладают частотнозависимым коэффициентом передачи, и, следовательно, в каждом из каналов будет присутствовать как полезный сигнал, так и помеха. Б этих случаях разделение-сигн лов практически имеет место лишь при .существенном различии высшей частоты спектра полезного сигнала и низшей частоты спектра помехи. Целью изобретения является повышение надежности управления за счет исключения влияния инерционных возмущений. Поставленная цель достигается тем, что устройство снабжено измерителем скорости перемещения маятника датчика, йход которого соединен с маятниковым датчиком положения, а выход через блок задержки с переключателем через нормально замкнутые контакты которого соединены элемент сравнения и усилитель-преобразовател При этом измеритель скорости перемещения маятника выполнен в виде последовательно соединенных дифферен цирующего усилителя и электромеханического реле. На фиг.1 представлена функциональ ная схема устройства на фиг.2 пример реализации принципиальной схе мы применительно к планировщику. Устройство состоит из соединенных друг с другом объекта управления (ра бочего органа) 1 датчика 2 положения рабочего органа, сравнивающего устройства 3, усилителя-преобразователя 4, электрогидравлического золотника 5 и гидроцилиндра 6. К выходу датчика 2 подсоединен ди ференцирующий усилитель 7, связанный с релейным устройством 8-. Последний связан с переключающим устройством 1 через блок 9 задержки. Переключающее устройство связьгоает между собой сра нивающее устройство и усилитель-гпреобразователь регулятора. На фиг.2 показан пример реализаци принципиальной схемы применительно к планировочной машине. Датчик 2 положения маятникового типа установлен на задней раме планировщика. Выход датчика связан с сравнивающим устройством 3, которое включает потенциометр датчика, потенциометр R 2 и поляризованное реле Р. Контакты поляризованного реле связаны с двухканальным усилителем 4, к выходам которого подсоединены электромагниты золотника 5. Выход датчика 2 также соединен со входом дифференцирующего усилителя 7, соединенного с реле 8. Нормально разомкнутые контакты этого реле К1:I связаны с переключающим устройством 10, имеющим задержку на выключение и контакты К2:1. Через эти контакты на средний контакт К3:3 поляризованного реле Р подается положительный полюс питания . Устройство работает следующим образом. В процессе работы устройства происходит изменение положения регулируемой координаты - рабочего органа 1. Эти изменения измеряются датчиком 2 положения и сравниваются в сравнивающем устройстве 3 с сигналом задатчика. На выходе сравнивающего устройства появляется сигнал ошибки,который усиливается усилителем 4 и управляет положением электрогидравлического золотника 5.Золотник 5 под воздействием сигнала усилителя подает масло от насоса в истоковую или бесштоковую полости цилиндра, перемещая рабочий орган в сторону уменьшения отклонения от равновесного состояния.Такая работа регулятора положения ножа происходит при идеальном датчике 2 положения. В реальных условиях возмущения действуют не только на рабочий орган, но и на датчик 2. Вследствие этого на выходе датчика имеет место комбинация полезного сигнала и помехи. Причем причиной помехи является всякое изменение скорости перемещения рабочего органа. Дифференцирующий усилитель 7 выделяет производную сигнала датчика, которая характеризует скорости изменения положения рабочего органа, а значит и степень воздействия инерционных возмущений на него. При определенной величине этой производной (выбираемой в процессе эксплуатации или на основании априорной информации) срабатывает релейное устройство 8, которое переключает переключатель 10 в состояние, при котором срабатывающее устройство 3 ра5зомкнуто от усилителя 4. В результате золотник 5 приходит в нейтральное положение, а рабочий орган I, несмот ря на наличие сигнала на выходе датчика 2, не перемещается относительно машины. Через некоторое время, определяемое блоком .9 задержки, после то го, как величина сигнала на выходе .усилителя 7 станет меньше установленной величины, переключатель 10 придет в первоначальное состояние, что приведет к восстановлению нормал ных связей между звеньями системь и, следовательно к отработке регулятором сигнала ошибки на выходе сравнивающего устройства. Таким образом, предлагаемое устройство позволяет устранить вредное влияние на датчик положения инерционных возмущений независимо от того, по какой причине это возмущение воз никло. Работоспособность предлагаемого устройства не зависит от спектрально го состава ни помехи, ни полезного сигнала. При всяком увеличении производной сигнала выше установленной величины устройство будет выключать систему управления. Таким образом, в результате применения зтого устройства появляется возможность устранить влияние на систему управления инерционной помехи выше определенной величины независимо от того, по какой причине она возникла . Кроме того, за счет включе1шя (Нормально замкнутых контактов в цепь между сравнивающим устройством и усилителем стало возможным отказаться 156 от дополнительного датчика взаимных перемещений, что упрощает констр тсцию всего устройства. Формула изобретения 1,Устройство управления рабочим органом землеройной машины, включающее маятниковый датчик положения,, элемент сравнения, усилитель-преобразователь , электрогидравличбский золотник, гидроцилиндр положения рабочего органа, блок задержки и перекдно-. чатель, отличаюце.еся тем, что, с целью павышенвя надежности за счет устранения влияния инерционг ых возмущений, оно снабжено ида4ерителем скорости перемещения маятника датчика, вход которого соединен с маятниковым датчиком положения, а выход через блок задержки с переключателем через нормально замкнутые контакты которого соеданены элемент сравнения и усилитель-преобразователь. 2.Устройство по П.1, о т л и ,чающееся тем, что измеритель скорости перемещения маятника выполнен в виде последовательно соеданенных да фференцирующего усилителя и электромеханического реле. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР , кл. Ё 02, F9/20, 1973. 2.Авторское свидетельство СССР № 420737, кл/Е 02 . F 9/20, 1972 (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления рабочим органом землеройной машины | 1983 |
|
SU1122792A1 |
| Система управления рабочим оборудованием землеройной машины | 1981 |
|
SU953121A1 |
| Устройство стабилизации положенияРАбОчЕгО ОРгАНА зЕМлЕРОйНыХ МАшиН | 1979 |
|
SU804791A1 |
| Управляющее устройство к землеройным машинам | 1978 |
|
SU754001A1 |
| Устройство контроля системы автоматического управления землеройной машиной | 1983 |
|
SU1157182A1 |
| Устройство для управления исполнительным органом | 1982 |
|
SU1149217A1 |
| Система управления гравиметром | 1982 |
|
SU1084728A1 |
| СИСТЕМА УПРАВЛЕНИЯ УГЛОВЫМ ПОЛОЖЕНИЕМ КОСМИЧЕСКОГО АППАРАТА | 1970 |
|
SU1839997A1 |
| Устройство для стабилизации горизонтального положения платформы транспортного средства | 1984 |
|
SU1339038A1 |
| Шпалоподбивочная машина | 1980 |
|
SU965364A3 |