Предлагаемое изобретение представляет движитель для летательных аппаратов, создающий с одной своей стороны разрежение воздуха, вследствие чего и появляется некоторая подъемная сила или при другом расположении вала движителя- соответствующая тяга.
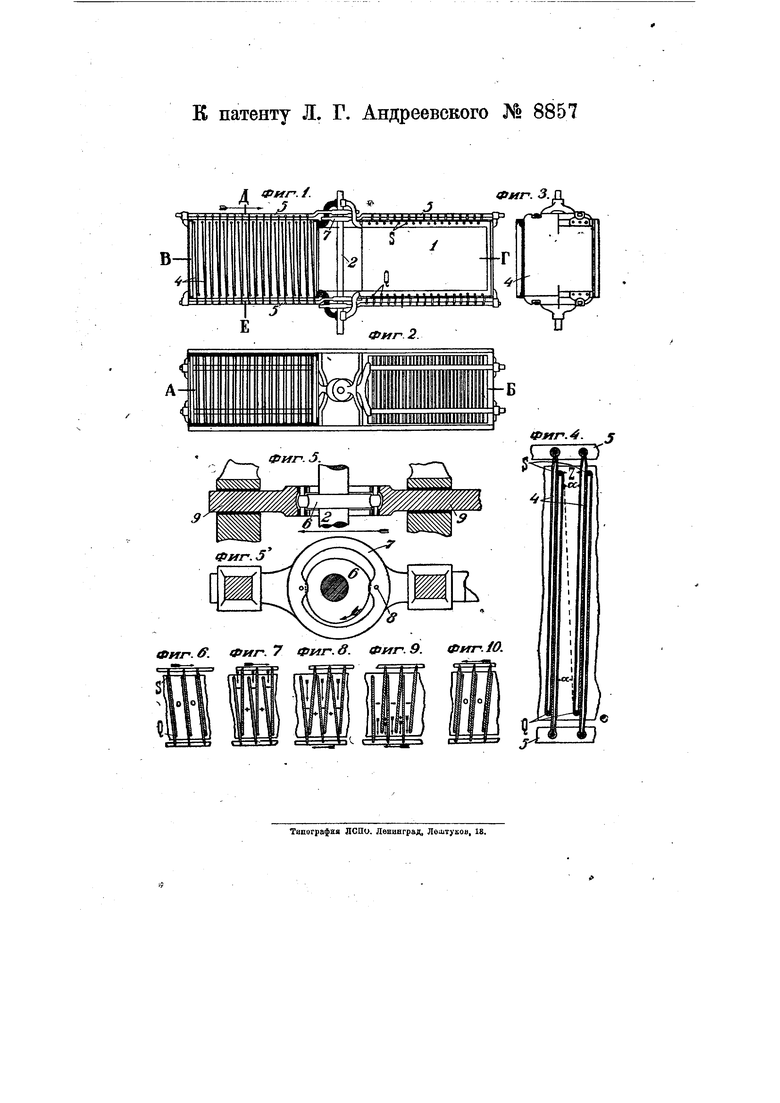
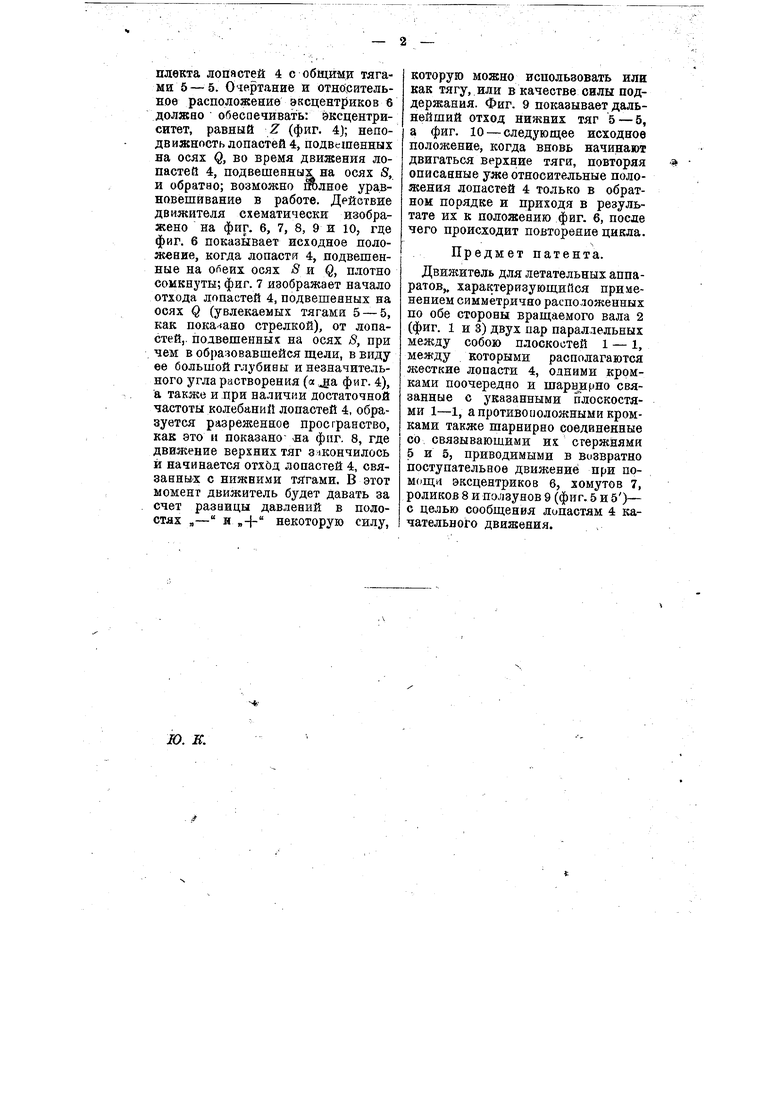
На чертеже фиг.. 1 изображает ВИД движителя спереди с частичным разрезом по АБ на фиг. 2; фиг. 2 - ВИД сверху с частичным разрезом по БГ на фиг. 1; фиг. s - ВИД на профильной плоскости с частичным разрезом по ДЕ на фиг. 1; фиг. 4 - крепление и относительное расположение лопастей; фиг. 5 и 5 дают В двух проекциях вид механизма, приводящего в качательное движение лопасти; фиг. 6, 7,8,9,10 схематически изображают действие движителя, при чем условный знак „-j- обозначает сжатие воздуха, „- - разрежение и атмосферное давление.
Устройство движителя заклю,чается в следующем: симметрично по обе стороны вращаемого вала 2 (фиг. 1, 2, 3, 5 и 5) расположены две параллельные между собой вертикальные плоскости 1 - 1,
жестко скрепленные вверху и внизу. горизонтальными параллельными друг другу стержнями S к Q, при чем верхние стержни S расположены точно против середин промежутков между нижними стержнями Q и числом на один более нижних. Одаовремеано стержни 8 -и. Q служат для шарнирного крепления жестких лопастей 4 (фнг. 4), заполняющих просвет между плоскостями 1 - 1 ВОЗМОЖНО плотнее (фиг. 3). Противоположные стержням S VI Q кромки лопастей 4, несколько выступающие над краями плоскостей 1 - 1, также шарнирно связаны с соединительными тягами 5 - 5, которые В пределах амплитуды качаний лопастей 4 (величина Z, фиг. 4) получают возвратнопоступательное движение спомощью заклиненного на Алу 2 эксцентрика 6 (фпг. 5,5), при чем эксцеитр ик 6 окруяген хомутом 7 с двумя роликами 8, катящимися по эксцентрику, каковое устройство и заставляет двигаться возвратно-поступательно как хомут 7, так ж связанные с ним через ползуны 9 тяги 5 - 5. Всего эксцентриков предусматривается четыре, по одному для каждого комплекта лопастей 4 с общими тягами 5- 5. Очертание и относительное расположение эксцентриков 6 должно обеспечивать: эксцентриситет, равный Z (фиг. 4J; неподвижность лопастей 4, подвешенных на осях Q, во время движения лопастей 4, подвешенных на осях S, и обратао; возможно Еголное уравновешивание в работе. Действие движителя схематически изображено на фиг. 6, 7, 8, 9 и 10, где фиг. 6 показывает исходное положение, когда лопасти 4, подвешенные на опеих осях S и Q, плотно сомкнуты; фиг. 7 изображает начало отхода лопастей 4, подвешенных на осях Q (увлекаемых тягами 5 - 5, как noKa-taHo стрелкой), от лопастей,, подвешенных на осях 8, при чем в образовавшейся щели, в виду ее большой глубивы и незначительного угла растворения (« jja фиг. 4), а также и при наличии достаточной частоты колебаний лопастей 4, образуется разреженное пространство, как это и показано- -на фиг. 8, где движение верхних тяг закончилось и начинается отход лонастей 4, связанных с нижними тяТами. В этот момент движитель будет давать за счет разницы давлений в полостях „- н,, некоторую силу.
которую можно использовать или как тягу, или в качестве силы поддержания. Фиг. 9 показывает дальнейший отход нижних тяг 5 - 5, а фиг. 10 - следующее исходное положение, когда вновь начииают двигаться верхние тяги, повторяя описанные уже относительные положения лопастей 4 только в обратном порядке и приходя в результате их к положению фиг. 6, после чего происходит повторение цикла.
Предмет патента.
Движитель для летательных аппаратов,, характеризующийся применением симметрично расположенных по обе стороны вращаемого вала 2 (фиг. 1 и 3) двух пар параллельных между собою плоскостей 1 - 1, между которыми располагаются жесткие лопасти 4, одними кромками поочередно и шарвирно связанные с указанными плоскостями 1-1, а противоположными кромками также шарнирно соединенные со, связывающими их стержнями 5 и 5, приводимыми в возвратно поступательное движение при помощи эксцентриков б, хомутов 7, роликов 8 и ползунов 9 (фиг. 5 и 5)- с целью сообщения лопастям 4 качательноГо движения.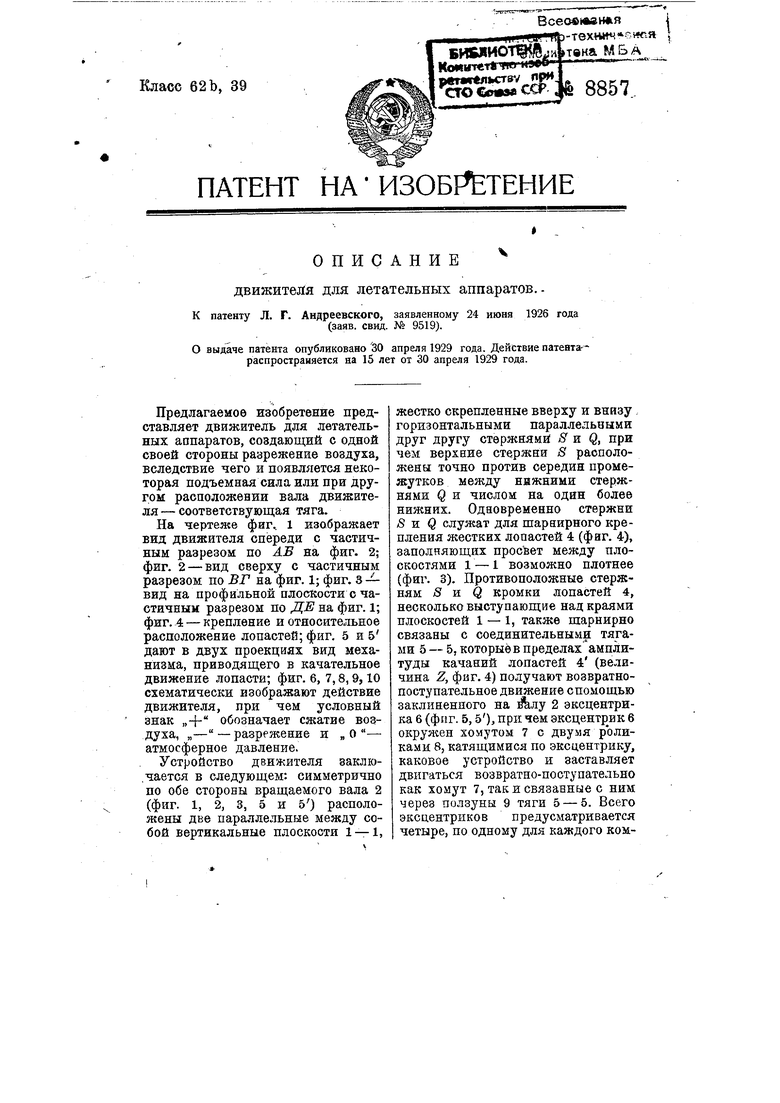
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ работы крыльчатого движителя и устройство для его осуществления | 2019 |
|
RU2720699C1 |
| СПОСОБ ПЕРЕМЕЩЕНИЯ УСТРОЙСТВА В ТРУБОПРОВОДЕ И УСТРОЙСТВО ДЛЯ РЕАЛИЗАЦИИ СПОСОБА (ЕГО ВАРИАНТЫ) | 2008 |
|
RU2392533C1 |
| МАХОЛЕТ "ПЧЕЛА" | 1991 |
|
RU2007337C1 |
| ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ КОВОЧНОЙ МАШИНЫ | 1992 |
|
RU2048946C1 |
| УСТРОЙСТВО ДЛЯ ИЗГОТОВЛЕНИЯ ИЗ КОНСТАНТАНОВОЙ ПРОВОЛОКИ СКОБОК И ВСТАВКИ ИХ В АСБЕСТОВЫЕ КОРОБКИ ТЕРМОБЛОКОВ | 1956 |
|
SU108681A1 |
| Судовой лопастный двигатель | 1934 |
|
SU47908A1 |
| Приспособление для опоражнивания бункера | 1935 |
|
SU46186A1 |
| РЕАКТИВНЫЙ ДВИЖИТЕЛЬ | 1999 |
|
RU2152332C1 |
| МАШУЩИЙ ДВИЖИТЕЛЬ | 1993 |
|
RU2089461C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С ГАЗОТУРБОИОННЫМИ ДВИГАТЕЛЯМИ | 2000 |
|
RU2190560C2 |