Изобретение относится к области авиации, а именно к летательным аппаратам вертикального взлета и посадки, использующим в качестве несущей и тяговой силы крыльчатые движители цилиндрического вида.
Существующие летающие устройства с крыльчатыми движителями имеют низкие показатели несущей системы по двум взаимосвязанным параметрам, удельной тяги на единицу мощности и удельной тяги на единицу максимальной площади, что препятствует созданию эффективных летательных аппаратов, реализующих другие уникальные свойства крыльчатых движителей, малую шумность, способность причаливать к вертикальным плоскостям, полет на «экране».
Исследуя все аналоги, прототип и предлагаемое изобретение, а также другие виды информации, аналогов способу не обнаружено.
Известна шарнирная лопасть с автоматическим регулированием геометрического угла атаки и кривизны профиля (патент США №5193978, МПК от 16.03.1993 г.), содержащая сложно сочлененную лопасть, состоящую из двух подвижных секций. Передняя секция с помощью параллелограмного устройства поворачивается вокруг собственной оси, параллельной оси ротора. Управляющий рычаг соединен шарнирно с осью лопасти и посредством параллелограмного механизма также соединен с задней секцией лопасти. Задняя секция лопасти шарнирно соединена с передней и всегда расположена параллельно управляющему рычагу, что приводит к автоматическому изменению геометрического угла атаки и одновременно изменению кривизны профиля лопасти во время вращения ротора. Такая конструкция лопасти в роторе позволяет осуществить способ получения направления тяги с устройства.
Недостатком устройства является отсутствие связи с кинематическим алгоритмом управления и поведения лопастей по углам атаки и кривизны профиля по циклу их вращения, что не позволяет оценить эффективность работы устройства в целом. Автор не указывает на работоспособность самого устройства, раскрывая лишь одно из конструктивных решений, способное частично обеспечить оптимизацию взаимодействия профиля лопасти с рабочим телом.
Известно устройство крыльчатого движителя (Aircraft, патент US 7735773. МПК В64С 29/00, В64С 39/08, В64С 39/00, приоритет от 18.31.2002 г.), который является прототипом заявленного устройства. Описан вращающийся на валу ротор цилиндрического вида, поверхность которого образует крылообразные сложно сочлененные лопасти, расположенные на равных угловых расстояниях, с вращением вокруг оси цилиндра и колебанием вокруг собственных осей, при этом каждая лопасть обеспечена тягой привода ее качания, шарнирно закрепленной за ось вращения задней секции лопасти, имеющей подвижность относительно передней секции лопасти.
Недостатком известного технического решения является фрагментарность технического решения крыльчатого движителя, при котором отсутствие весовой балансировки задней секции лопасти относительно собственной оси вращения и передней секции относительно своей оси качания делают невозможной работу всего устройства в целом в виду значительных 800-1200 кратных рабочих нагрузок лопастей центробежными силами. Авторы не указывают на работоспособность самого движителя, раскрывается лишь одно из конструктивных устройств, способное частично обеспечить оптимизацию взаимодействия профиля лопасти с рабочим телом.
Технической задачей изобретения является нахождение способа работы крыльчатого движителя, увеличивающего суммарную движущую силу его лопастей и использование этой силы в качестве несущей, тяговой и управляющей сил несущей системы летательного аппарата вертикального взлета, посадки.
Технический результат от применения группы изобретений заключается в увеличении движущей силы, создаваемой крыльчатым движителем.
Указанный технический результат достигается использованием разработанного способа работы крыльчатого движителя, заключающегося, согласно изобретению, в том, что при вращении цилиндра ротора движителя вокруг неподвижной оси, запускается работа управляющего циклического кулачкового механизма, осуществляется качание его крылообразных лопастей на оси их вращения через тяги, меняется кинематический управляющий радиус относительно оси вращения ротора в зависимости от циклического положения лопастей, при этом одновременно начинают работать синусные механизмы лопастей, являющимися управляющими и исполнительными устройствами изменения геометрии и конфигурации взаимного расположения профилей лопасти и закрылка, которые посредством совокупной работы с подвижным эксцентриком автомата циклических углов, приводят в движение лопасть и закрылок относительно друг друга, одновременно формируя ассиметричные совокупности профилей различной кривизны, изменяют пространственное положение лопастей относительно оси их качания, образуя аэродинамическую щель профилей по циклу вращения, предотвращая срывное обтекание лопастей, при вращении ротора вокруг оси обеспечивается циркуляция воздуха из внешней среды через торцовые диски ротора внутрь цилиндра посредством установки углов атаки управляемых подвижных элементов торцевых спиц.
Указанный технический результат достигается так же за счет применения крыльчатого движителя цилиндрического вида, обеспечивающего выполнение способа, по п. 1, содержащего вращающийся на оси ротор цилиндрического вида, поверхность которого образует крылообразные лопасти, расположенные на равных угловых расстояниях, с вращением на оси цилиндра и качанием вокруг собственных осей, при этом каждая лопасть обеспечена тягой привода ее качания, шарнирно закрепленный к лопасти, согласно изобретению, состоит из торсионов, соединенных с торцевыми дисками для вращения и передачи крутящего момента, имеющих радиальные спицы, жестко закрепленные одним концом на торсионе, соединенные другим концом с осями, на которых шарнирно качаются лопасти, механизм изменения циклических углов, выполненный в виде радиально подвижного эксцентрика, вокруг которого вращается узел с шарнирно закрепленными тягами привода качания лопастей, синусного механизма, управляющего отклонением закрылка относительно лопасти, являющегося исполнительным механизмом устройства управляющего геометрией, конфигурацией взаимного расположения профилей лопастей и закрылков, расположенным на торцевых сторонах лопастей и на ободе торцевого диска, состоящего из кулисы, установленной одним концом на ободе торцевого диска, другим концом подвижно соединенной с ползуном, жестко соединенным с закрылком, имеющим возможность вращения на оси лопасти, при этом лопасти и закрылки сбалансированы элементами относительно собственных осей вращения.
Существенные отличия группы изобретений.
Оптимизация взаимодействия работы профиля лопасти движителя, и группы лопастей с рабочим телом, любым способом:
- через создание оптимальной проекции аэродинамической силы каждой лопасти на большей части траектории ее движения на общий вектор тяги, например, кинематическим алгоритмом управления поведением лопастей;
- через совершенствование самого профиля, например, использованием высоко несущих свойств не симметричного профиля, работающего при более низких значениях числа Рейнольдса, введением щели закрылка;
- через обеспечение адекватности реакции профиля лопасти и группы лопастей на изменение поведения рабочего тела, например, механизмом подстройки величины циклических углов атаки лопастей, изменением кривизны профиля и размера щели закрылка.
- за счет частичного повышения плотности самого рабочего тела внутри ротора любым способом, например, принудительным нагнетанием воздуха из внешней среды внутрь вращающегося цилиндра ротора через зоны естественного всасывания. Изобретение иллюстрируется рисунками.
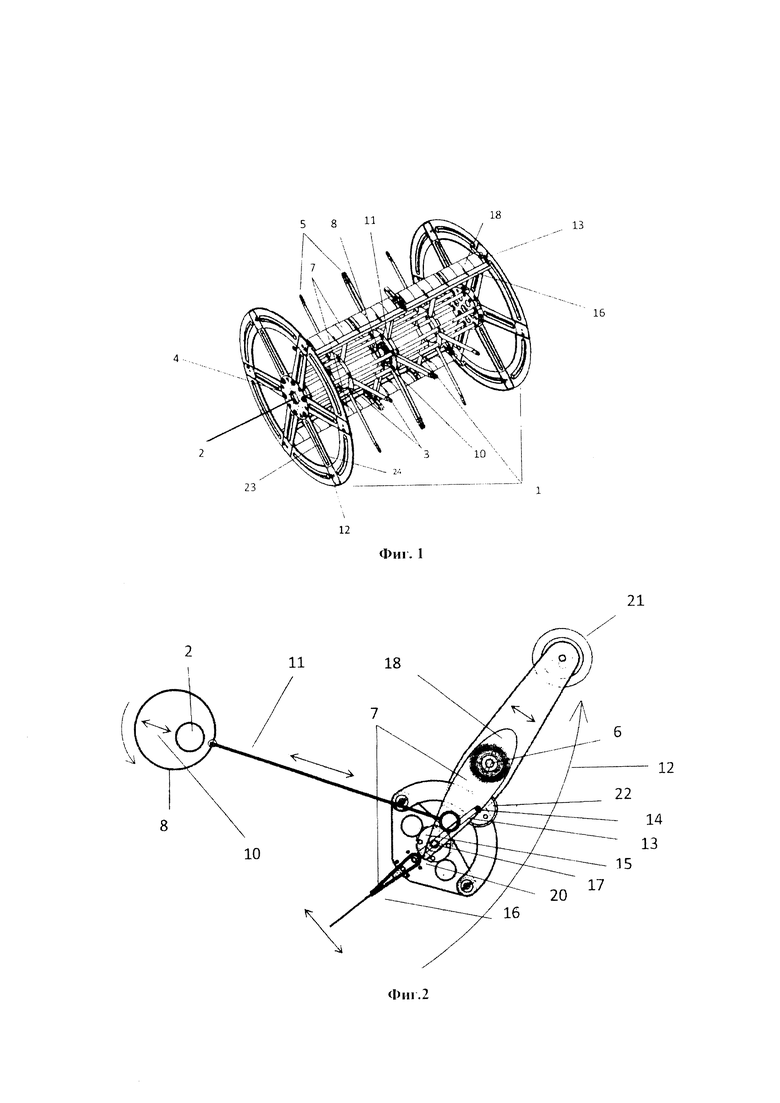
На Фиг. 1 представлен крыльчатый движитель цилиндрического вида, общий вид.
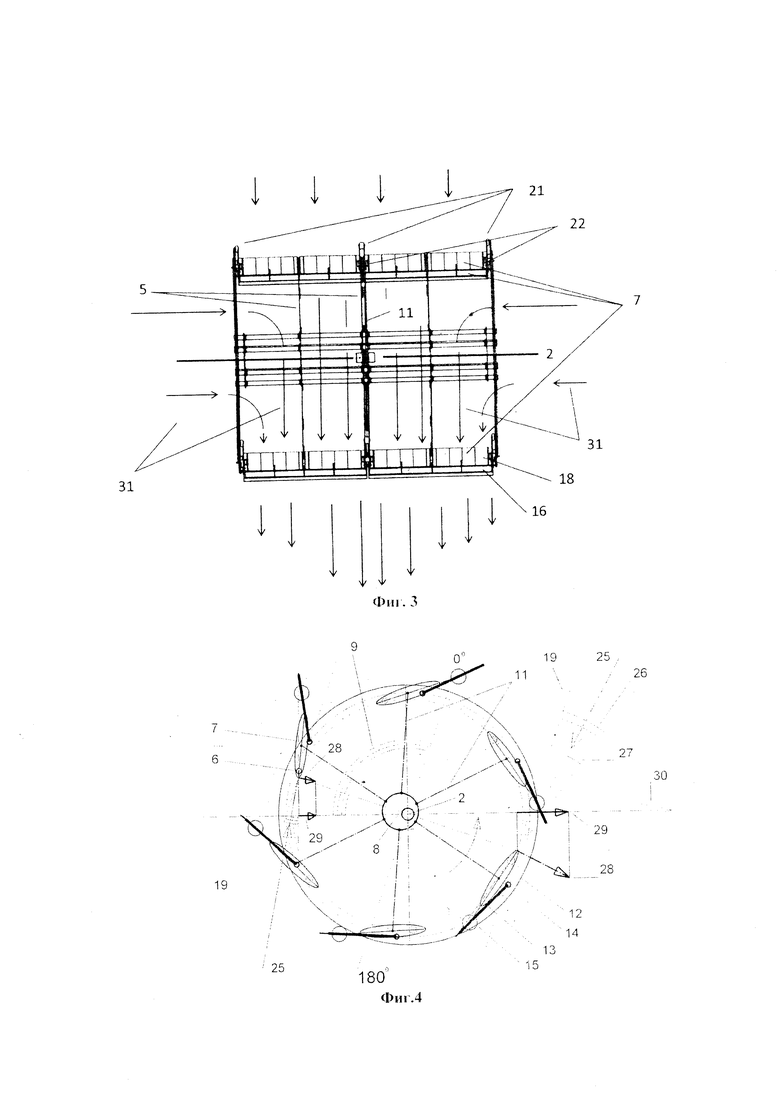
На Фиг. 2 - то же, узел подстройки аэродинамической формы профиля лопасти.
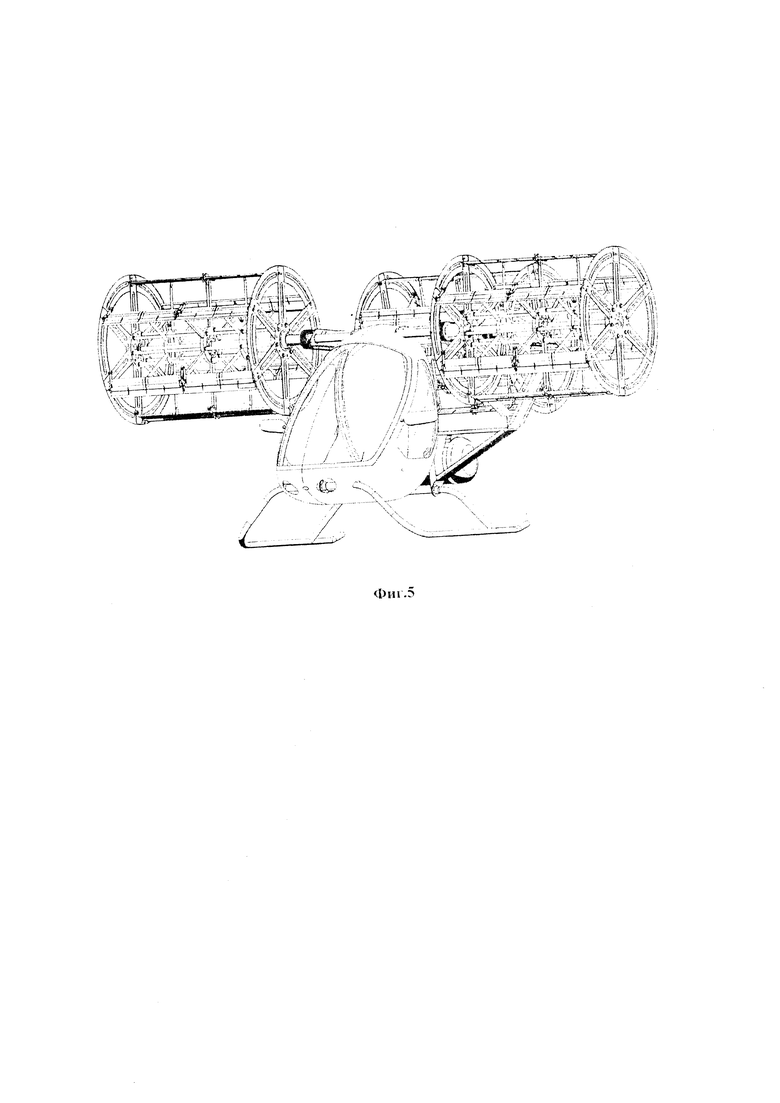
На Фиг. 3 - то же, схема повышения плотности рабочего тела внутри цилиндра ротора.
На Фиг. 4 - то же, схема последовательности действий управляющих устройств и их кинематическая основа создания общего вектора аэродинамической силы.
На Фиг. 5 - то же, летательный аппарат вертикального взлета, посадки с несущей и тяговой системой на основе крыльчатых движителей.
Позиции обозначают: корпус ротора 1; ось ротора 2; торсион 3; торцевые диски 4; радиальные спицы 5; оси 6 лопасти 7; лопасть 7; автомат 8 циклических углов 9; циклические углы 9; подвижный эксцентрик 10 автомата 8; тяги привода качания 11 лопасти 6; обод торцевого диска 12; кулиса 13; ось 14 кулисы 13; ползун 15; закрылок 16: ось 17 вращения закрылка 16; основной профиль 18; касательные 19; щель 20 закрылка 16; балансировочные элементы 21 лопасти 7; балансировочные элементы 22 закрылка 16; подвижные элементы 23 торцевых спиц 24; торцевые спицы 24; результирующий вектор скорости набегающего воздуха 25; геометрический угол 26 профиля лопасти 18; угол атаки 27 профиля лопасти 18; направление движущей силы 28; проекция движущей силы лопасти на общее направление сил 29; суммарное направление движущей силы 30; нагнетание рабочего тела через торцевые диски 31.
Способ работы крыльчатого движителя, увеличивающего суммарную движущую силу его лопастей в соответствии с настоящим изобретением, осуществляется в проиллюстрированном крыльчатом движителе следующим образом. При вращении ротора вокруг неподвижной оси 2 (фиг. 1; 2) набегающий на лопасть воздух образует результирующий вектор его скорости 25, который в качестве рабочего тела, начинает взаимодействовать с профилем лопасти 7, посредством заданного геометрического угла 26 и через создание угла атаки 27, в соответствии с заложенным кинематическим алгоритмом, подстраивает свою аэродинамическую форму и поведение таким образом, что на большей части пути движения по криволинейной траектории, создается движущая сила 28, проецирующаяся на общее направление сил 29, суммируясь в единую движущуюся силу. Одновременно с этим при вращении ротора вокруг оси 2, внутри цилиндра ротора образуются зоны разрежения, возникает циркуляция воздуха из внешней среды через торцевые диски ротора внутрь цилиндра (фиг. 3), управляемые подвижные элементы 23 торцевых спиц посредством установки углов атаки, принудительно нагнетают дополнительное рабочее тело 31 через зоны естественного всасывания внутрь цилиндра, что приводит к частичному повышению плотности рабочего тела внутри цилиндра ротора (фиг. 3) создавая условия более эффективной работы лопастей 7 в заднем секторе ротора.
Крыльчатый движитель цилиндрического вида (фиг. 4) как основной элемент несущей и тяговой системы летательного аппарата вертикального взлета, посадки (фиг. 5) представляет собой ротор цилиндрического вида, вращающегося на оси 2, поверхность которого образует крылообразные, сложно сочлененные лопасти 7, расположенные на равных угловых расстояниях с вращением вокруг оси цилиндра и колебанием вокруг собственных осей. Конструктивно крыльчатый движитель состоит из корпуса ротора 1, шарнирно установленного на оси 2, вращение и передача крутящего момента производится посредством торсиона 3 соединенного с торцевыми дисками 4. На торсионе жестко закреплены одним концом радиальные спицы 5, соединенные другим концом с осями 6 на которых шарнирно качаются лопасти 7. Посредством радиальных спиц 5 лопасти 7 разгружаются от центробежных сил. Ось ротора 2 является несущей опорой крыльчатого движителя, каналом передачи управляющих воздействий на лопасти и содержит закрепленные на ней и в ней управляющие устройства, автомат 8 изменения циклических углов 9. Механизм изменения циклических углов, выполненный в виде радиально подвижного эксцентрика 10, вокруг которого вращается узел с шарнирно закрепленными тягами привода качания 11 лопастей 7, одновременно служащими исполнительным механизмом поведения профиля лопастей 7. На торцевых частях лопастей 7 с двух сторон, а также ободе торцевого диска 12 размещены управляющие устройства поведением профиля лопасти 7, состоящие из кулисы 13, установленной одним концом на ободе торцевого диска с собственной осью вращения 14, другим концом подвижно соединена с ползуном 15, жестко закрепленным с закрылком 16, имеющим возможность вращения на оси 17 основного профиля 18 лопасти 7. Поведение профиля 18 лопасти 7, заключающееся в том, что изменяется пространственное положение лопасти 7 относительно касательных 19, меняется геометрия профиля лопасти 7, размер ширины щели 20 закрылка 16. Все элементы крылообразных сложно сочлененных лопастей 7 сбалансированы элементами 21 и 22 относительно собственных осей вращения 6 и 17. Принудительное нагнетание рабочего тела из внешней среды внутрь цилиндра ротора осуществляется за счет увеличения угла атаки 27 подвижных элементов 23 торцевых спиц 24 корпуса ротора.
Крыльчатый движитель цилиндрического вида, обеспечивающий выполнение способа, состоит из корпуса ротора, шарнирно установленного на оси, а вращение и передача крутящего момента производится посредством торсиона ротора, одновременно разгружая от центробежных сил лопасти крыльчатого движителя шарнирно связанных с радиальными спицами жестко закрепленных на торсионе, управление и направление вектора тяги осуществляется посредством вращения оси, на которой закреплено управляющее устройство, состоящее из автомата изменения циклических углов, вокруг которого вращается узел с шарнирно закрепленными тягами привода качания лопастей, изменение величины циклического угла производится управляющим устройством автомата циклических углов атаки, посредством поперечного перемещения его эксцентрика, а исполнительным механизмом принудительного нагнетания рабочего тела внутрь цилиндра ротора являются торцевые диски, через которые посредством управляемой установки углов атаки подвижных частей торцевых спиц или любых других устройств производится подача рабочего тела. Управляющее устройство поведением профиля лопасти расположено в торцевых частях каждой лопасти и состоит из кулисы, установленной на торцевом ободе торцевых дисков с собственной осью вращения, которая одновременно подвижно соединена другим концом с ползуном, жестко закрепленным с закрылком и имеющим возможность вращения относительно ее. Крыльчатый движитель является обратимым устройством и может работать в качестве двигателя, утилизирующего энергию текучей среды потока воды или воздуха для преобразования ее в электрическую или механическую энергию.
Изобретение позволяет повысить эффективность получения суммарной движущей силы с крыльчатого движителя и таким образом создать летательные аппараты вертикального взлета, посадки нового типа как авиатранспортные средства с комплексом свойств, мало шумностью, способностью причаливания к вертикальным плоскостям, полете на «экране», недостижимых для существующего типа летательного аппарата вертикального взлета, посадки - вертолета. Крыльчатый движитель является обратимым устройством и может работать в качестве двигателя, утилизирующего энергию текучей среды потока воды или воздуха для преобразования ее в электрическую или механическую энергию.
| название | год | авторы | номер документа |
|---|---|---|---|
| Крыльчатый двигатель | 2020 |
|
RU2743564C1 |
| КОМБИНИРОВАННЫЙ КРЫЛЬЧАТЫЙ ДВИЖИТЕЛЬ ПОДВОДНЫХ АППАРАТОВ | 2023 |
|
RU2806471C1 |
| РОТОР "ВОЗДУШНОЕ КОЛЕСО". ГИРОСТАБИЛИЗИРОВАННЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ И ВЕТРОЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА, ИСПОЛЬЗУЮЩИЕ РОТОР "ВОЗДУШНОЕ КОЛЕСО", НАЗЕМНОЕ/ПАЛУБНОЕ УСТРОЙСТВО ИХ ЗАПУСКА | 2013 |
|
RU2538737C9 |
| РОТОР ВЕРТИКАЛЬНО-ОСЕВОГО ВЕТРОДВИГАТЕЛЯ | 1992 |
|
RU2034169C1 |
| Устройство для измерения усилий и крутящего момента крыльчатых движителей | 1975 |
|
SU517816A1 |
| БЕЗАЭРОДРОМНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2018 |
|
RU2746025C2 |
| ЕДИНЫЙ АЭРОНАЗЕМНЫЙ ДВИЖИТЕЛЬ ЛЕТАТЕЛЬНОГО АППАРАТА | 2019 |
|
RU2735442C1 |
| Циклический движитель летательного аппарата вертикального взлета и посадки | 2022 |
|
RU2778181C1 |
| Автомат перекоса однороторного летательного аппарата и способ его работы | 2020 |
|
RU2740039C1 |
| Автомат перекоса многороторного летательного аппарата с жестким креплением лопастей и способ его работы | 2020 |
|
RU2749709C1 |
Изобретение относится к области авиации, а именно к летательным аппаратам вертикального взлета и посадки, использующим в качестве несущей и тяговой силы крыльчатые движители. Способ работы крыльчатого движителя заключается в том, что при вращении цилиндра ротора движителя кулачковым механизмом осуществляется качание крылообразных лопастей, меняется кинематический управляющий радиус относительно оси вращения, синусные механизмы лопастей изменяют геометрию и конфигурации взаимного расположения профилей лопасти и закрылка. При вращении ротора обеспечивается циркуляция воздуха через торцовые диски ротора внутрь цилиндра посредством установки углов атаки элементов торцевых спиц. Крыльчатый движитель содержит ротор, поверхность которого образуют крылообразные лопасти. Каждая лопасть обеспечена тягой привода ее качания. Движитель содержит торсионы, радиальные спицы, механизм изменения циклических углов, выполненный в виде эксцентрика, синусный механизм, управляющий отклонением закрылка относительно лопасти, состоящий из кулисы, установленной одним концом на ободе торцевого диска, другим концом подвижно соединенной с ползуном, жестко соединенным с закрылком. Обеспечивается увеличение движущей силы, создаваемой крыльчатым движителем. 2 н.п. ф-лы, 5 ил.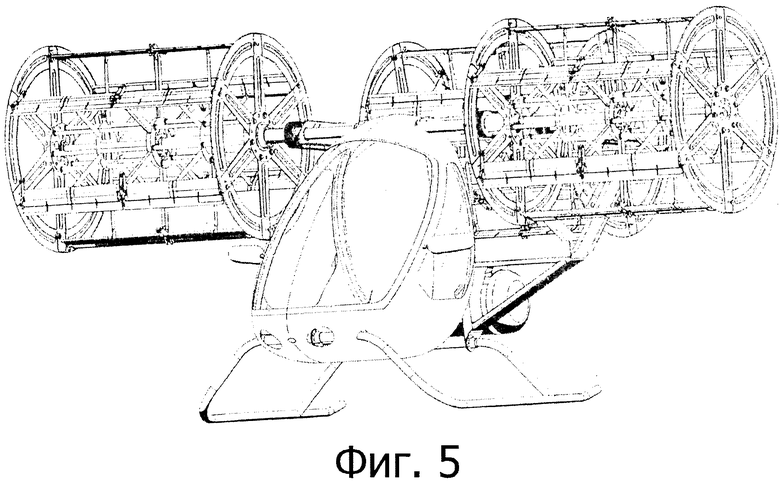
1. Способ работы крыльчатого движителя, заключающийся в том, что при вращении цилиндра ротора движителя вокруг неподвижной оси запускается работа управляющего циклического кулачкового механизма, осуществляется качание его крылообразных лопастей на оси их вращения через тяги, меняется кинематический управляющий радиус относительно оси вращения ротора в зависимости от циклического положения лопастей, при этом одновременно начинают работать синусные механизмы лопастей, являющиеся управляющими и исполнительными устройствами изменения геометрии и конфигурации взаимного расположения профилей лопасти и закрылка, которые посредством совокупной работы с подвижным эксцентриком автомата циклических углов, приводят в движение лопасть и закрылок относительно друг друга, одновременно формируя асимметричные совокупности профилей различной кривизны, изменяют пространственное положение лопастей относительно оси их качания, образуя аэродинамическую щель профилей по циклу вращения, предотвращая срывное обтекание лопастей, при вращении ротора вокруг оси обеспечивается циркуляция воздуха из внешней среды через торцевые диски ротора внутрь цилиндра посредством установки углов атаки управляемых подвижных элементов торцевых спиц.
2. Крыльчатый движитель цилиндрическою вида, обеспечивающий выполнение способа по п. 1, содержащий вращающийся на валу ротор цилиндрического вида, поверхность которого образует крылообразные лопасти, расположенные на равных угловых расстояниях, с вращением вокруг оси цилиндра и качанием вокруг собственных осей, при этом каждая лопасть обеспечена тягой привода ее качания, шарнирно закрепленный к лопасти, отличающийся тем, что состоит из торсионов, соединенных с торцевыми дисками для вращения и передачи крутящего момента, имеющих радиальные спицы, жестко закрепленные одним концом на торсионе, соединенные другим концом с осями, на которых шарнирно качаются лопасти, механизм изменения циклических углов, выполненный в виде радиально подвижного эксцентрика, вокруг которого вращается узел с шарнирно закрепленными тягами привода качания лопастей, синусного механизма, управляющего отклонением закрылка относительно лопасти, являющегося исполнительным механизмом устройства, управляющего геометрией, конфигурацией взаимного расположения профилей лопастей и закрылков, расположенных на торцевых сторонах лопастей и на ободе торцевого диска, состоящего из кулисы, установленной одним концом на ободе торцевого диска, другим концом подвижно соединенной с ползуном, жестко соединенным с закрылком, имеющим возможность вращения на оси лопасти, при этом лопасти и закрылки сбалансированы элементами относительно собственных осей вращения.
| US 5193978 A1, 16.03.1993 | |||
| US 7735773 B2, 15.06.2010 | |||
| ДВИЖИТЕЛЬ С ПОДВИЖНЫМИ СПИЦАМИ | 2015 |
|
RU2601491C1 |
| САМОЛЕТ-АМФИБИЯ С ВЕРТИКАЛЬНЫМ ВЗЛЕТОМ И ПОСАДКОЙ | 1994 |
|
RU2125524C1 |

