(54) КОМАНДОАППАРАТ
| название | год | авторы | номер документа |
|---|---|---|---|
| Инклинометр | 1982 |
|
SU1102914A1 |
| ПОЛЯРИЗОВАННЫЙ ГЕРКОН И ПОЛЯРИЗОВАННОЕ КОММУТАЦИОННОЕ УСТРОЙСТВО | 2011 |
|
RU2474000C1 |
| Синхронный электродвигатель с магнитной редукцией | 2018 |
|
RU2704491C1 |
| МОТОР-КОЛЕСО | 2017 |
|
RU2673587C1 |
| Преоразователь угла поворота вала в код | 1976 |
|
SU634343A1 |
| Мотор-колесо для самолета | 2018 |
|
RU2703704C1 |
| Синхронный электродвигатель с магнитной редукцией | 2017 |
|
RU2668817C1 |
| АВТОМАТИЧЕСКАЯ РЕВОЛЬВЕРНАЯ ГОЛОВКА | 1993 |
|
RU2051012C1 |
| ДИСКРЕТНЫЙ УРОВНЕМЕР | 2001 |
|
RU2193165C1 |
| Командоаппарат | 1977 |
|
SU686097A1 |
Изобретение относится к электротехнике и может быть использовано в машииостроительной, автомобильной и тракторной промьпиленностях на оборудовании, работающем в автоматическом цикле или в единичном щпсле, в течеиие которого производятся различные автоматические команды, нанример при работе прессов, машин и формовочных автоматов Известен переключатель, содержащий барабан, в котором смонтированы магнитные узлы, состоящие из четырех постоянных магнитов, создающих узкое магнитное поле. Вокруг барабана расположены герконы, представляющие из себя стеклянные трубки с впаянными в них контактными пластинами. Прт совмещении магнитного поля, создаваемого четырьмя магнитами с осью геркоиа, происходит замыкание его контактных пластин, т.е. включение соответствукнцей цепи 1. Недостатком этого устройства является то, что оно может быть использовано только для выключения или переключения электрических цепей, так как для удержания электрической цепи во включенном состоянии вращение барабана, несущего магнитную систему, должно быть остановлено н зафиксировано в определенном положении, что недопустимо при Щ1клично работающих машинах, где барабан должен иметь nt1ферывное вращение, согласованное с циклом работы маишны, а это невозможно осуществить с известной сложной магнитной системой. Известен коммутатор, содержащий П-образную траверсу, в опорах которой вращается управляхнций механизм, состоящий из ротора с включаюнщми и отключающими кулачками, воздействующими на контактные элементы управляемой а1стемы, кото{ 1е замыкают и размыкают электрические цепи, управляемые машиной 2. Недостатком такого коммутатора является то, чю работа его осуществляется за счет мехаиического воздействия кулачков иа подвижные контакты и подвижных контактов на неподвижные контакты, в результате чего происходит износ подвижных частей и залипание и подгорание контактов, приводящих к авариям. Кроме того, он сложен по конструкции и дорог в яг готовлении.
Наиболее близким к предлагаемому является омандоаппарат, содержащий корпус, герконы, группированные: в съемные модули и закрепенные в корпусе, ось вращения, сцепленную механизмом управления, и источники МДС 3.
Однако в известном командоаппарате для управления работой герконов используются подвижные шторки, закрепленные на оси вращения, что усложняет конструкцию и снижает надежность работы.
Цель изобретения - упрощение констр)гкции повьпыение надежности работы.
Поставленная цель достигается тем, что в командоаппарат, содержащий корпус, герконы, сгруппированные в съемные модули и закрепленные в корпусе, ось вращения, сцепленную с механизмом управления, и источники МДС, введены цилинд{Я1ческие диски, вьшолненные ю немагнитного матертала и закрепленные на оси вращения, каждый источник МДС выполнен в виде отрезка гибкой ленты, обладающей . ферромагнитными свойствами и остаточной индукцией, достаточной для срабатывания герконов, каждый из О7резков гибкой ленты закреплен на цшшнщ ической поверхности указанных дисков, так что осуществляет воздействие на герконы, KOTOpbie расположены напротив каждого отрезка гибкой ленты.
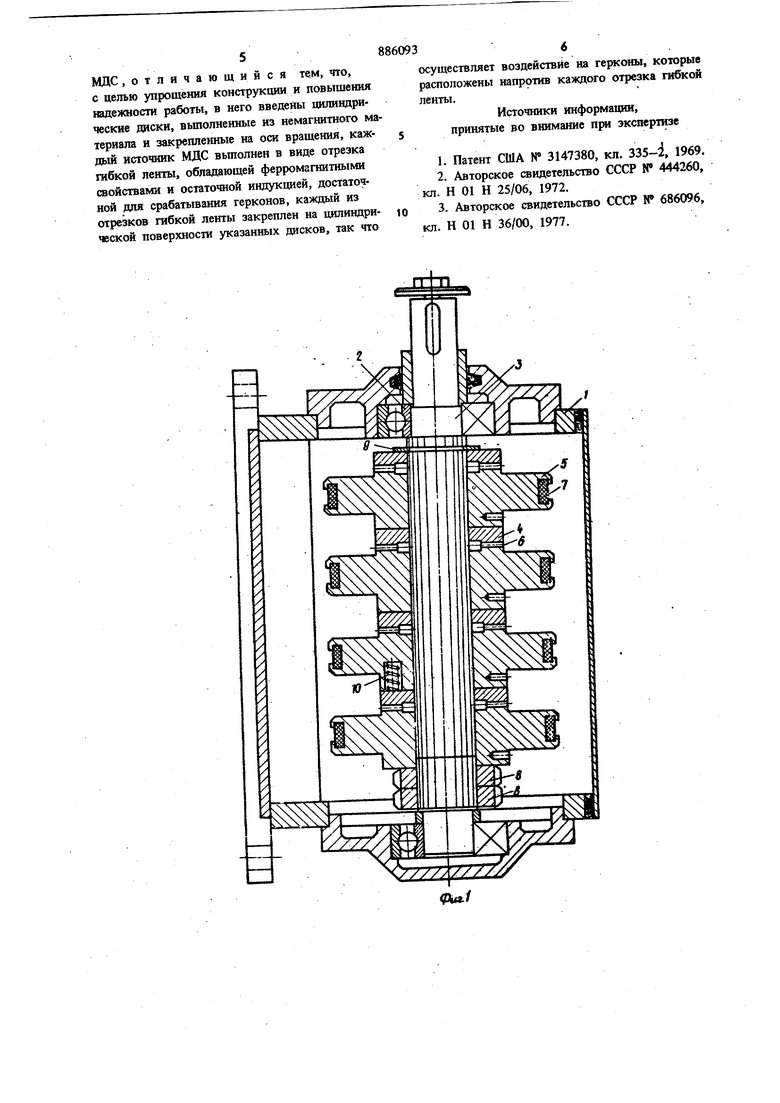
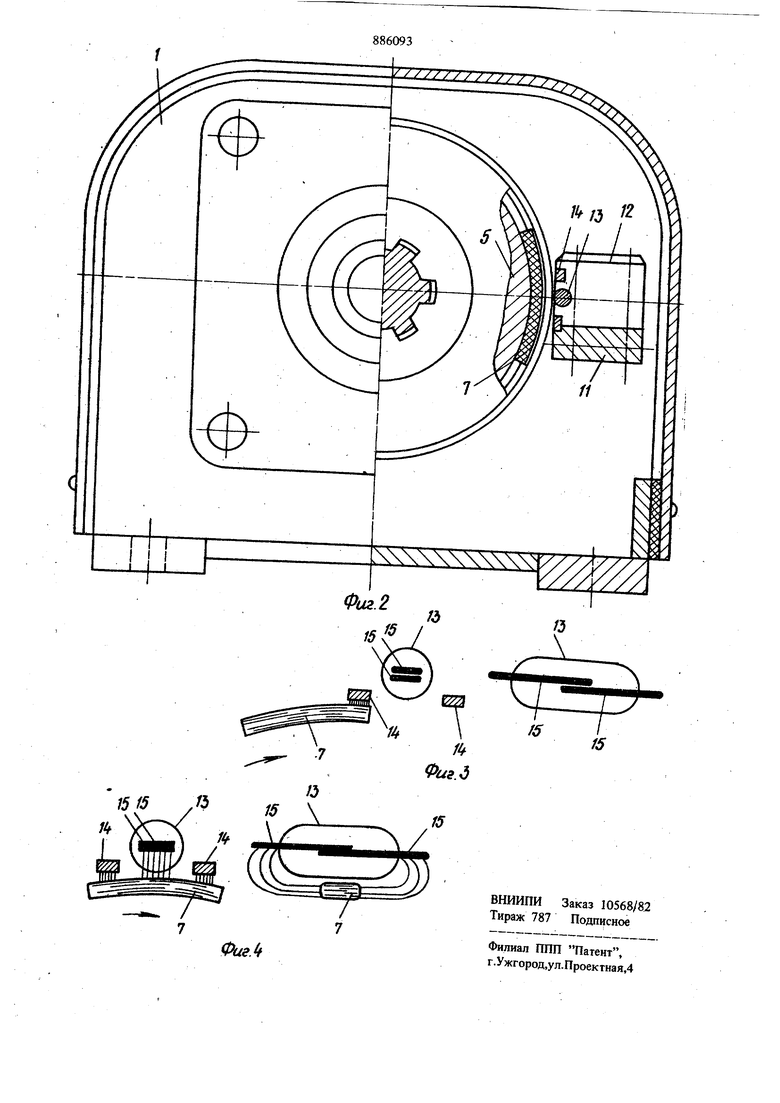
На фиг. I представлен предлагаемый командоаппарат, продольный разрез; на фиг. 2 то же, поперечный разрез; на фиг. 3 - положение геркона при подходе гибкой ленты; на фиг. 4 - то же, при прохождении гибкой ленты в зоне геркона.
В корпусе 1 (фиг. 1) в подиошниках 2 смонтирован шлицевой: вал 3, являющийся осью вращения, на котором в шлицах расположены syiB- чатые полумуфты 4. Между полумуфтами 4 на валу 3 свободно сидят цилиндрические ски 5, выполненные из немагнитного материала и соединенные своими зубцами 6 с зубцами полумуфт 4. Количество I дисков 5 выбирается по числу осуществляемых аппаратом команд. В пазах дисков 5 на цшшндрической поверхности завальцованы отрезки гибкой ленты 7, длина отрезков выбирается в зависимости от продолжительности действия соответствующей команды. Гибкая лента ферромагнитш ми свойствами имеет остаточную индукцию, достаточную для срабатьшания герконов.
Пакет деталей 4 и 5 затянут на валу 3 между гайками 8 и кольцом 9. В одном из дисков 5 имеются гнезда, в которые заложены пружины 10.
К стенкам корпуса 1 (фиг. 1 и 2) прикреплена пластина 11, на которой против каждого диска 5 расположены модули 12 с герконами 13. Модули 12 и пластина И вьшолнены из немагнитного материала. В каждом модуле 12, по бокам от геркона 13, помещены вьшолненные из трансформаторного железа пластины 14.
Прохождение магнитного поля от ленты 7 и ее взаимодействие с контактными пластинами 15 геркона 13 показано на фиг. 3 и 4.
Командоаппарат имеет четыре диска 5 с вмоншрованными в них гибкими лентами 7, предназначен для осуществления четырех команд. Для большего числа команд нужно соответствующее число дисков 5.
Аппарат работает следующим образом.
Ось вращения связана с какой-либо жесткой передачей с рабочим органом мапшны, например с зксцентриковым валом пресса. Обороты вала 3 согласовываются с циклом работы маншНЬ1. Во время вращения вала 3 отрезки гибкой ленты 7, вмонтированной в диски 5, проходят в непосредственной близости от герконов 13. В то время, когда гибкая лента 7 находится против геркона 13, силовые линии магнитного поля, проходя через контактные пластины 15 геркона 13 (фнг. 4), замыкают их и тем самым включают соответствующую злектрическую цепь какого-либо органа мапшны. После того, как гибкая лента 7 прокатит геркон 13 его контактные пластины 15 размыкаются и действие команды прекращается.
При подходе гибкой ленты 7 к геркону 13 (фиг. 3) или при отходе от него ее магнитное действие блокируется пластинами 14, чем повышается точность срабатывания геркона. Если необходимо получить как точное включенне, так и точное вьпслючение команды, пластины 14 ставятся по обе стороны геркона 13. Если до- , статочна только односторонняя точность, то -пластину 14 устанавливают только с одаой, ограничивающей действие геркона, стороны.
Порядок действия всех команд осуществляется соответствующей установкой дисков 5, для чего гайки 8 отвертывают на величину высоть зуба б полумуфт 4, поочередно устанавливают диски. 5 в требуемое положение и вновь затягивают гайки 8. При установке одного из дисков 5 остальные диски удерживаются на месте пружинами 10.
Предлагаемый командоаппарат позволяет упростить конструкцию, снизить трудоемкость изготовления. Повысить надежность работы, а также применять его в пшроком температурном диапазоне во взрывоопасных и загрязненных средах.
Формулаизобретения
Командоаппарат, содержащий корпус, герконы, сгруппированные в съемные модули и закрепленные в корпусе, ось вращения, сцепленную с механизмом управления, и источники МДС .отличающийся тем, что, с целью упрощения конструкции и повышения надежности работы, в него введены цилиндрические диски, вьшолненные из немагнитного материала и закрепленные на оси вращения, каждый источник МДС вьшолнен в виде отрезка габкой ленты, обладающей ферромагнитными свойствами и остаточной индукцией, достаточной для срабатывания герконов, каждый из отрезков гибкой ленты закреплен на цилиндрической поверхности указанных Дисков, так что 88609 5 10 « осуществляет воздействие на герконы, которые расположены напротив кяжлото отрезка гибкой ленты. Источники информации, принятые во внимание при экспертизе 1.Патент США N 3147380, кл. 335-i, 1969. 2.Авторское свидетельство СССР № 444260, кл. Н 01 Н 25/06, 1972. 3. Авторское свидетельство СССР IP 686096, кл. Н 01 Н 36/00, 1977.
