(54) КОМАНДОАППАРАТ
говый механизм и приводной механизм для вращения вала.
Недостатком такого командоаппарата
является то, что отсутствует самовозврат рукоятки выключателя в нулевое положение, что сужает область его применения,
Кроме того, сложный механизм фиксации рабочих положений включает много деталей, а отсюда необходима сложная конфигурация вала, что повышает стой- мость изготовления и увеличивает габариты.
Целью изобретения является расширение области применения командоаппарата.
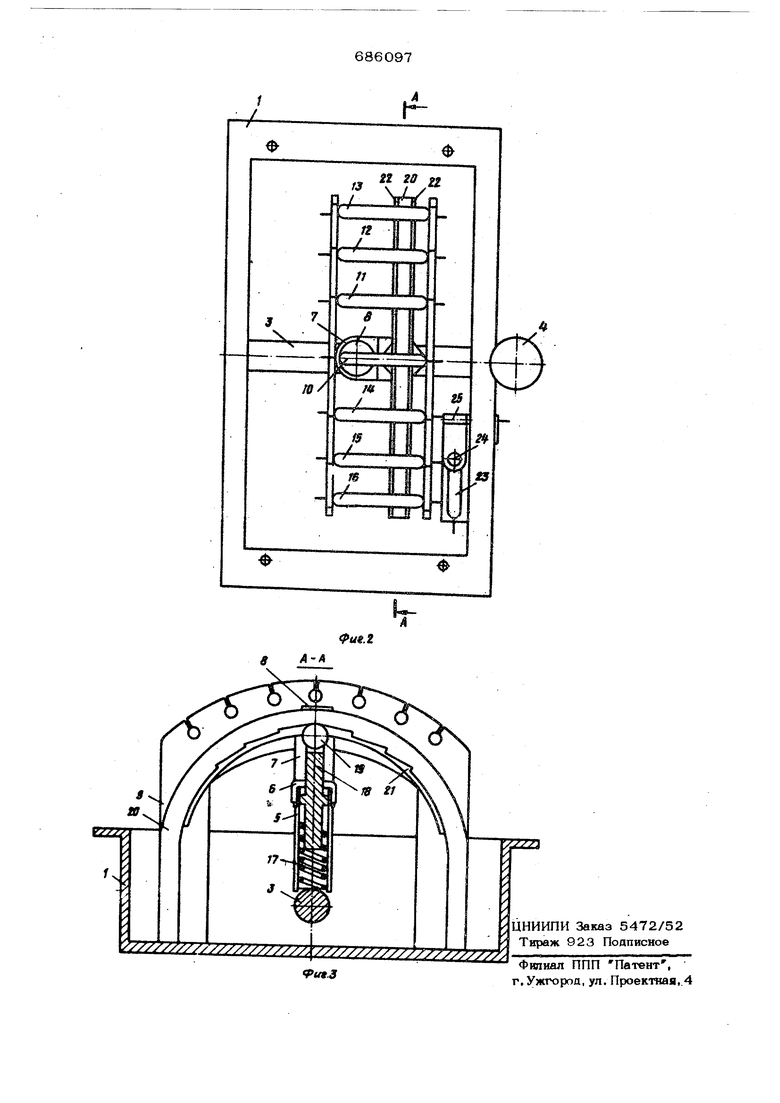
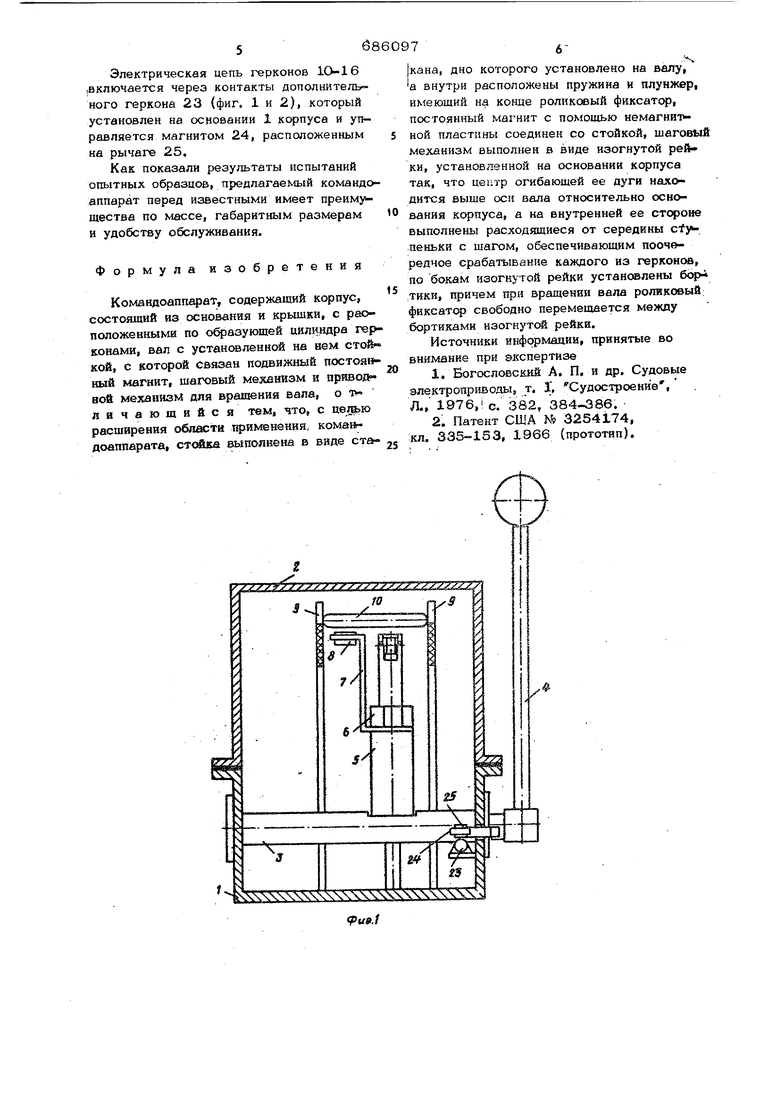
Для этого в командоаппарате, содержащем корпус, состоящий из основания и крышки, с расположенными по образующей цилиндра герконами, вал с установленной на нем стойкой, с которой связан подвижный постоянный магнит, шаговый механизм и пр11водной механизм для вращения вала, стойка выполнена в виде ста« |кана, дно которого установлено на валу, ia внутри расположены пружина и плунжер, |имек щнй на конце роликовый фиксатор, постоянный магнит с помощью неглагнить. ;ной пластины соединен со стойкой, шаго вый механизм выполнен в виде изогнутей рейки, установленной на основании корпу са так, что центр огибающей ее дуги на™ ходится Bbuue оси вала относительно оо нования корпуса, а на внутренней ее сто роне выполнены расходящиеся от середи« ны ступеньки с шагом, обеспечивающим поочередное, срабатывание каявдого яз гер конов, по бокам рейки установлены бор™ тики, причем при вращении вала ролико вый фиксатор свободно перемещается меж ду бортиками изогнутой рейки, На фиг, 1 изображен команаоаппаратв продольный разр- з; на фиг, 2 он же со снятой крышкой, вид сверху на фиг. 3 разрез А-А на фиг, 2, Командоаппарат имеет корпус с ос но вднием 1 и крышкой 2, через который проходит вал 3 с укрепленными на нем рукояткой 4 и стойкой 5, выполненной а виде стакана. На стойке с помо1дью гайк 6 закреплена немагнитная пластигна 7, не сущая постоянный магнит 8. К основанию 1 корпуса крепятся изолирующие стойки 9, на которых по обра зующей цилиндра расположены нулевой геркон 10 и герконы 11-16 (фиг. 2). Внутри стойки 5, имеющей форму стака™ на, находится пружина 17 (фиг. 3), взаи.модействующая с плунжером 18, на кото ром закреплен роликовый фиксатор 19.
Шаговый механизм выполнен в виде изогнутой рейки 20, установленной на основании 1 корпуса так, что центр огибающей ее дуги находится выше оси вала 3относительно основания корпуса. На внутренней стороне рейки 20 выполнены расходящиеся от ее середины ступеньки 21 с шагом, обеспечивающим поочередное срабатывание герконов. По бокам рейки 20
установлены бортики 22 (фиг. 2), между которыми перемещается роликовый фиксатор 19. Ступеньки 21 имеют такой наклон и высоту, чтобы обеспечить самопроизвольное перемещение фиксатора в нулевое
положение под действием упругих сил сжимаемой пружины 17.
Пружина 17 сжимается плунжером 18 и имеет постоянное первоначальное сжатие за счет того, что перемещение фиксатора 19 ограничено в вертикальном направлении ступеньками 21 рейки 2О. Это ; позволяет удерживать командоаппарат в ;нулевом положении {как показано на фиг. 2 и 3), т« е. в таком положении,
,при котором постоянный магнит 8 взаимо действует с герконом 1О. Принцип действия командоаппарата з&ключается в следующем.
При воздействии оператором на pyKOsrpку 4, например, влево, вал 3 поворачивается в сторону воздействия и перемещает ртойку 5, а вместе с ней и постоянный магнит 8, При этом геркон 1О размыка|ется, а геркон 14 замыкается. Одновременпо фиксатор 19 перемещается по перг. ВОЙ ступеньке 21 рейка 20 до первого зубца. Пружина 17 сжимается. При дальнейшем повороте, рукоятки 4 и вала 3 фиксатор переходит на вторую ступеньку и останавливается у второго зубца. При 8ТОМ постоянный магнит 8 замыкает геркон 15, а геркон 14 размыкается, Пр йшна 17 сжимается еще больше. В тр&тъем положении действие командоаппарата аналогично, только фиксатор преодолеть третью ступеньку не может, так как она больше по величине, чем первые две, и дальнейшее вращение вала невозможно. При прекращении воздействия оператором на вал 3 пружина 17 давит на 18, а следовательно, и на фиксат з 19, который перемещается по ступенькам, имеющим скат к нулевому положению, тем самым возвращая командоаппарат в-неходкое положение, при этом все герконы, кроме нулевого, разомкнуты. Аналогично действует командоаппарат jnjfiH вращении вала вправо. Электрическая цепь герконов 10-16 (Включается через контакты дополнитель кого геркона 23 (фиг. 1 и 2), который установлен на основании 1 корпуса и управляется магнитом 24, расположенным на рычаге 25. Как показали результаты испытаний опытных образцов, предлагаемый командо :аппарат перед известными имеет преиму щества по массе, габаритным размерам и удобству обслуживания. Формула изобретения Командоаппарат, содержащий корпус, состоящий из основания и крышки, с расположенными по образующей цилиндра гер конами, вал с устансвленной на вем стой кой, с которой связан подвижный постоя ный магнит, шаговый механизм и пргюод вой механизм для вращения вала, о TV л имеющийся тем, что, с расширения области т хименения; комаадоаппарата, еьшоянена в виде , дно которого установлено на а внутри расположены пружина и плунжер, имеющий на конце ролнксеый фиксатс, постоянный магнит с помощью немагнитной пластины соединен со стойкой, шаговый механизм выполнен в виде изогнутой рейки, установленной на основании корпуса так, что цецтр огибающей ее дуги находится выше ocii вала относительно основания корпуса, а на внутренней ее выполнены расходящиеся от середины cf пеньки с шагом, обеспечивающим поочередное срабатывание каждого из герконоа, по бокам изогк гой рейки установлены борТИКИ, причем при вращении вала роликовый фиксатор свободно перемещается между бортиками изогнутой рейки. Источники информации, принятые во внйманне при экспертизе 1.Богословский А. П. и др. Судовые электроприводы, т. 1, Судостроение, Л., 1976, с. 382, 384-386. 2.Патент США № 3254174, кл. 335-153, 1966 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Командоаппарат | 1981 |
|
SU985839A1 |
| Командоаппарат | 1984 |
|
SU1188798A1 |
| Пресс для монтажа и демонтажа узлов | 1988 |
|
SU1574426A1 |
| ГИДРАВЛИЧЕСКАЯ ЛЕБЕДКА | 1998 |
|
RU2129091C1 |
| УСТРОЙСТВО ДЛЯ ФОРМОВАНИЯ ХАЛ ИЗ ПРЕДВАРИТЕЛЬНО ЗАКАТАННЫХ ТЕСТОВЫХ ЖГУТОВ | 1963 |
|
SU223714A1 |
| Автомат для навивки пружин | 1980 |
|
SU895576A1 |
| ФРЕЗЕРНЮ-ОТРЕЗНОЙ СТАНОК ДЛЯ ИЗМЕРЕНИЯ И ДЕЛЕНИЯ ЗАГОТОВКИ БЕЗ ОСТАТКА | 1973 |
|
SU382480A1 |
| Станок для заточки зубьев пил | 1991 |
|
SU1808528A1 |
| Станок для поперечного раскроя пиломатериалов | 1983 |
|
SU1121136A1 |
| Устройство шагового перемещения | 1985 |
|
SU1303511A1 |