(54) ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ
| название | год | авторы | номер документа |
|---|---|---|---|
| Шаговый электродвигатель | 1979 |
|
SU845237A1 |
| Шаговый электродвигатель ГНОМ | 1987 |
|
SU1732415A1 |
| Шаговый электродвигатель | 1979 |
|
SU845236A2 |
| Шаговый электродвигатель | 1978 |
|
SU758418A1 |
| Шаговый электродвигатель | 1979 |
|
SU904140A2 |
| Однофазный шаговый двигатель ИР-360 | 1985 |
|
SU1718344A1 |
| Шаговый электродвигатель | 1987 |
|
SU1713040A1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРИВОД ЧАСОВОГО ИНДИКАТОРА | 1987 |
|
RU2023280C1 |
| ЭЛЕКТРОДВИГАТЕЛЬ | 2006 |
|
RU2321142C1 |
| Шаговый электродвигатель | 1979 |
|
SU845235A1 |
1
Изобретение относится к электротехнике, в частности к шаговым электродвигателям, которые находят широкое применение в дискретном электроприводе.
По основному авт. св. № 758418 известен шаговый электродвигатель, содержащий статор с магнитной системой, имеющей два стержня с обмоткой, к которым примыкают полюсные наконечники, два постоянных магнита со своими полюсными наконечниками, намагниченные в направлении, параллельном оси двигателя, и ротор с зубцами, параллельными этой же оси. Стержни расположены снаружи ротора, а полюсные наконечники стержней установлены по обе стороны каждого стержня и выполнены Г-образными с зубцами на одном конце, вытянутыми вдоль зубцов ротора, которые на своих концах имеют выступы, при этом полюсные наконечники выполнены в виде платы, на которой закреплен кольцеобразный сердечник, помещенный внутри ротора с зубцами, расположенными против выступов на зубцах ротора 1.
Однако известный двигатель имеет строго постоянный таг перемещения ротора, что
ограничивает его функциональные возможности.
Цель изобретения - расширение функциональных возможностей за счет изменения величины шага.
Поставленная цель достигается тем, что в двигателе ротор выполнен с чередующимися по окружности широкими и узкими зубцами, зубцы полюсных наконечников одного стержня соответствуют по ширине щироким зубцам ротора, зубцы полюсных наконечников другого стержня соответствуют по щирине узким зубцам ротора, причем широкие зубцы ротора снабжены дополнительными аксиальными выступами, имеющими ширину узких зубцов ротора и расположенными против дополнительных зубцов, которыми снабжен внутренний сердечник статора, а узкие зубцы ротора имеют длину меньше длины щироких зубцов и равную длине узких зубцов полюсных наконечников.
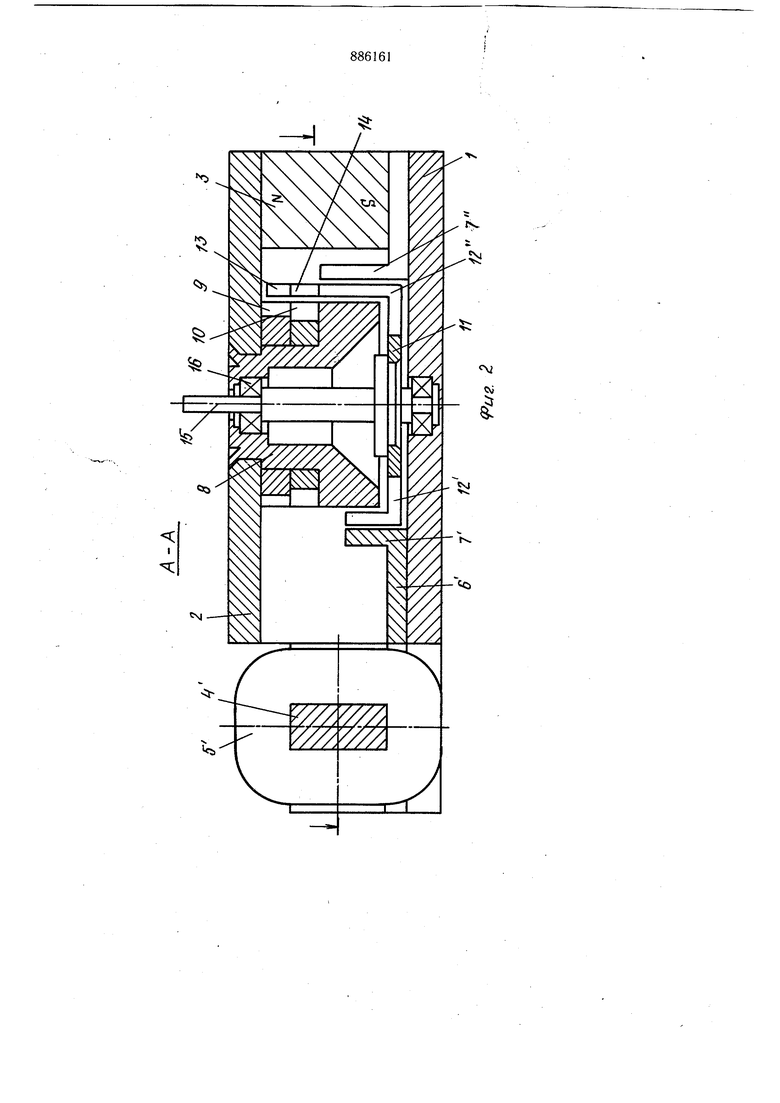
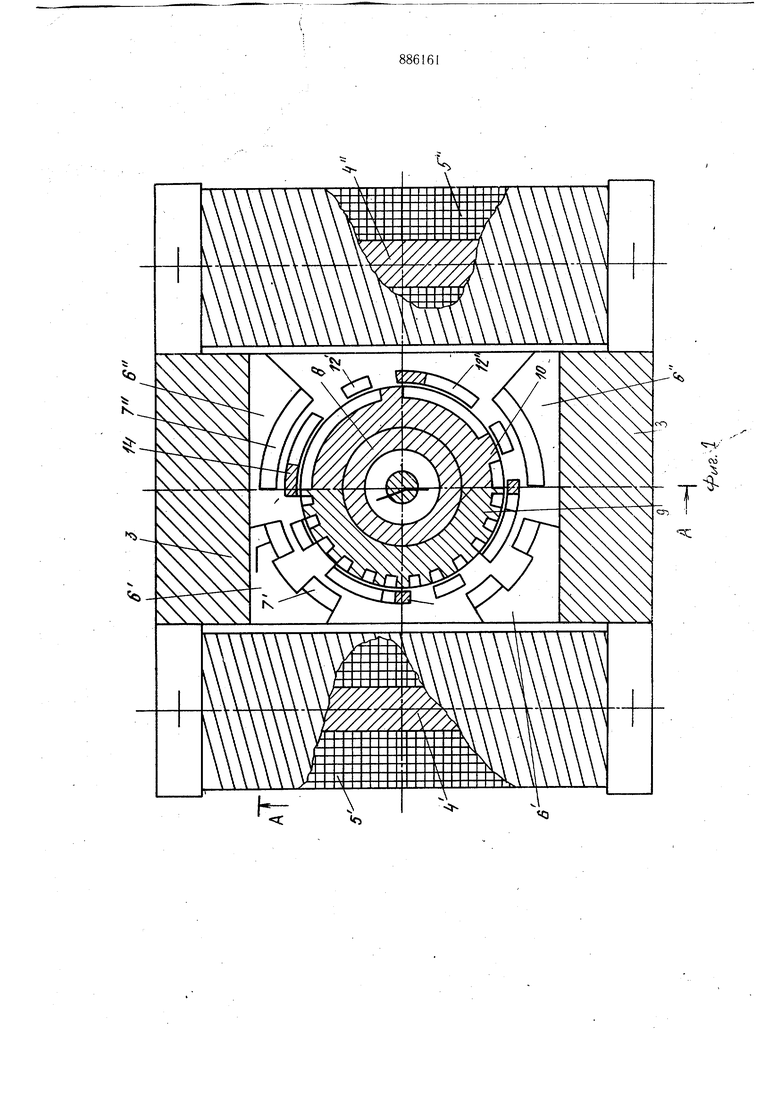
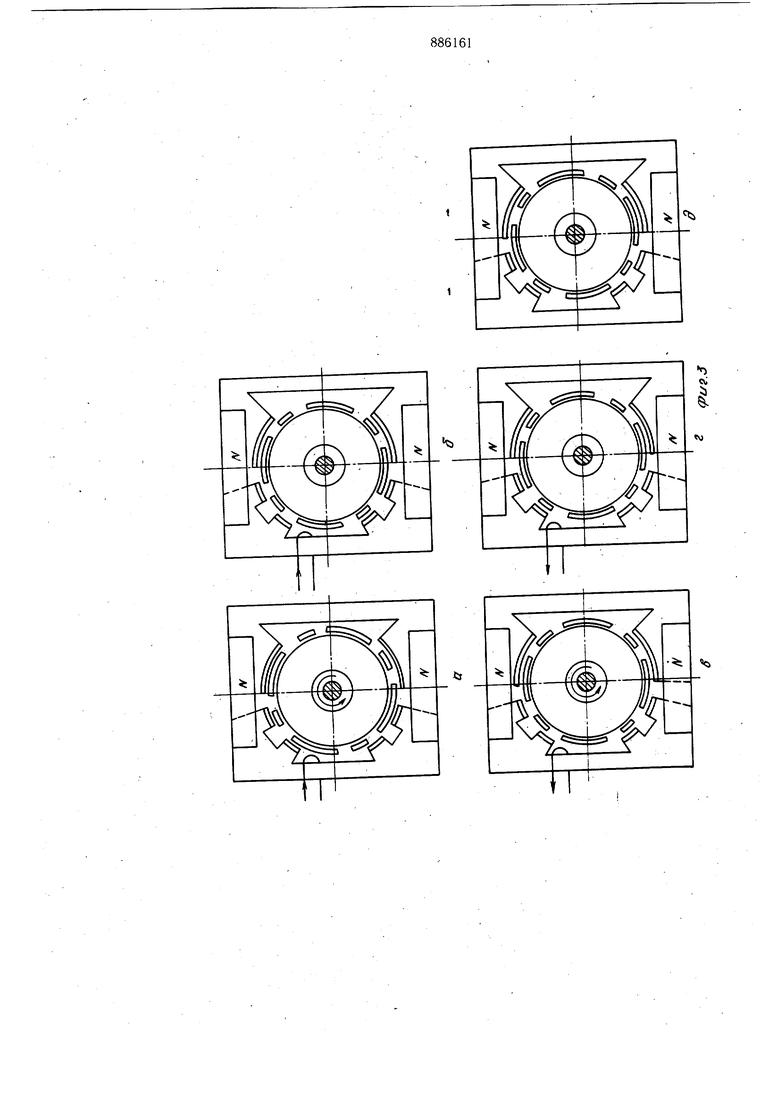
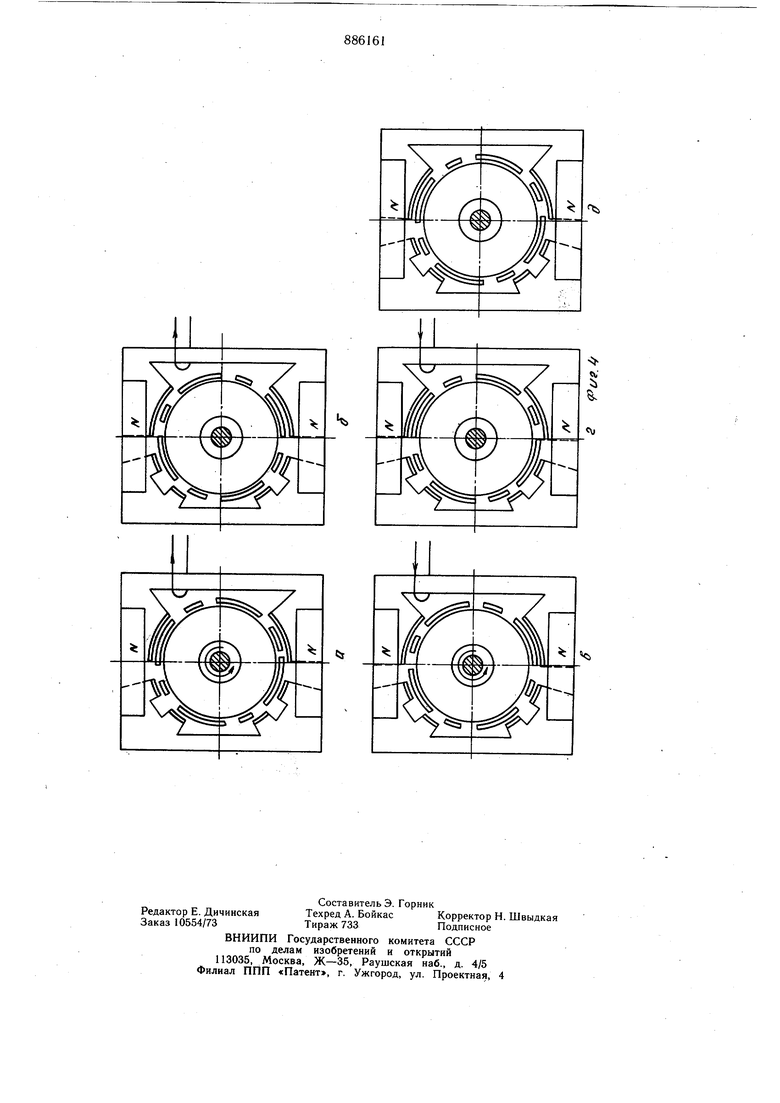
На фиг. 1 представлен предлагаемый двигатель, план; на фиг. 2 - разрез А-А на фиг. I; на фиг..З и 4 - работа двигателя соответственно с меньщим и больщим щагами. Двигатель состоит из плат 1 и 2, которые представляют собой полюсные наконечники постоянных магнитов 3. Между платами 1 и 2 расположены стержни 4 и 4 с обмотками 5 и 5 и Г-образные полюсные наконечники 6 и 6 с зубцами, причем полюсные наконечники б снабжены узкими и короткими зубцами 7, а полюсные наконечники 6 широкими и длинными зубц-ами 7 . В плате 2 закреплен кольцеобразный сердечник 8, на котором имеются зубцы 9 для создания фиксирующего момента, и дополнительные зубцы 10. Между наконечниками 6 и сердечником 8 установлен ротор 11, у которого узкие и короткие зубцы 12 чередуются с широкими и длинными зубцами , на которых имеются выступы 13 для создания диксируюш,его момента, и дополнительные зубцы 14, ширина которых равна ширине зубцов 1 и 10. Опорами 15 вала ротора 11 служат подшипники 16, размещенные в -сердечнике 8 и в пл,ате 1. Соотношение величин шагов при работе двигателя определяется соотношением щирины зубцов 7 и 7. При отсутствии тока в обмотках 5 и 5 благодаря потоку постоянных магнитов 3 и системе зубцов 9-13 на валу двигателя создается фиксирующий момент, под действием которого ротор занимает устойчивое положение (фиг. За, 4 а), при этом за счет наличия зубцов 10 на статоре и зубцов 14 на роторе, фиксирующий момент одинаков во всех других устойчивых положениях ротора. Если принять положение ротора по отношению к статору (фиг. За) за исходное, то дальнейшую работу двигателя осуществляют следующим образом. Подача тока в обмотку 5 с направлением указанным на фиг. За и 36, приводит к тому, что магнитный поток, наведенный этим током в рабочем зазоре нижних узких зубцов полюсных наконечников, будет складываться с магнитным потоком постоянных магнитов 3 а в рабочем зазоре верхних зубцов - вычитаться, благодаря чему возникает вращающий момент в направлении против часовой стрЪлки, под действием которого ротор займет положение, указанное на фиг. 36. Отключение питания обмотки 5 приведет к возникновению вращающего момента в том же направлении, обусловленного магнитным потоком постоянных магнитов и системой зубцов 9 и выступов 13, в результате чего ротор займет положение, указанное на фиг. 3 в. Дальнейщее движение ротора обеспечивается подачей в обмотку 5 импульса тока обратной полярности, при котором магнитные потоки будут складываться в рабочем зазоре верхних зубцов, а в зазоре нижних - вычитаться, что приведет к возникновению соответствующего вращающего момента и обеспечит поворот ротора до положения, показанного на фиг. 3г. Очередная пауза в питании обмотки создаст условия для последующего движения ротора благодаря магнитному потоку постоянных магнитов 3, зубцам 9 и выступам 13, который приведет ротор в положение, показанное на фиг. Зд. Таким образом, за рассматриваемый период ротор повернется на угол, равный малому зубцовому делению ротора, что создаст условия для аналогичного его движения при подаче разнополярных импульсов, чередующихся с паузами. Фиг. 4 а-д иллюстрируют работу двигателя при большем шаге, для чего такими же импульсами необходимо запитывать обмотку 5 , при этом шаг будет равен большему зубцовому делению ротора. Таким образом, предлагаемый электродвигатель способен работать с различной величиной шага. Формула изобретения Шаговый электродвигатель по авт. св. № , отличающийся тем, что, с целью расширения функциональных возможностей за счет изменения величины шага, ротор выполнен с чередующимися по окружности широкими и узкими зубцами, зубцы полюсных наконечников одного стержня соответствуют по щирине широким зубцам ротора, зубцы полюсных наканечников другого стержня соответствуют по щирине узким зубцам ротора, причем широкие зубцы ротора снабжены дополнительными аксиальными выступами, имеющими ширину узких зубцов ротора и расположенными против дополнительных зубцов, которыми снабжен .внутренний сердечник статора, а узкие зубцы ротора имеют длину меньше длины широких зубцов и равную длине узких зубцов полюсных наконечников. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 758418, кл. Н 02 К 37/00, 1978.
«
