}
Изобретение относится к машиностроению, а 194енно к механизмам для преобразования одного вида дэиження в другой.
Известен механизм для преобразования вращательного движения в возвратно-поступательное, содержащий вал, жестко соединенный с ним спиральный пазовый кулачок с круговыми участками на концах, глубина одного из которых выполнена убьшающей до нуля, взаимодействующий с кудачком одним концом палец и ползун, связанный с пальцем. Механизм снабжен качающимся на ползуне двуплечим рычагом и вторым пальцем, расположенным в рычаге, а кинематическая связь спирального пазового кулачка с ползуном в этом механизме осуществляется поочередно посредством роликов, установленных на пальцах, шарнирно соединенных с рычагом, ось которого закреплена в приливах ползуна. Выключение одного ролика и
включение второго осуществляется при взаимодействии роликов с круговым участком спирального пазового кулачка, глубина которого выполнена убывающей до нуля 1J.
Недостатком известного устройства является его низкая йадежность, обусловленная наличием большого количества звеньев и элементов конструкции, взаимодействуюп51х между
to собой, а также консольньм расположением пальцев, работающих на изгиб. Кроме того, известный механизм не имеет возможности ускоренного обратного хода.
15
Цель изобретения - повьщ1ение надежности .
Указанная цель достигается тем, что известный механизм, содержащий вал, жестко соединенный с ншл спи20ральный пазовый кулачок с круговыми участками на концах, глубина одного из которых выполнена убывающей до нуля, взаимодействующий с кулачком
одним концом палец и ползун, связанный с пальцем, снабжен жестко соединенным с валом вторым спиральным пазовым кулачком с круговыми участками на концах, глубина одного из которых, расположенного на коьще, противоположном концу с убывающим по глубине участком первого пазового кулачка, выполнена убывающей до нуля, концы спирали второго кулачка расположены напротив соответствующих концов спирали первого кулачка, а палец, взаимодействующий со вторым пазовым кулачком, размещен в ползуне с возможностью возвратнопоступательного движения.
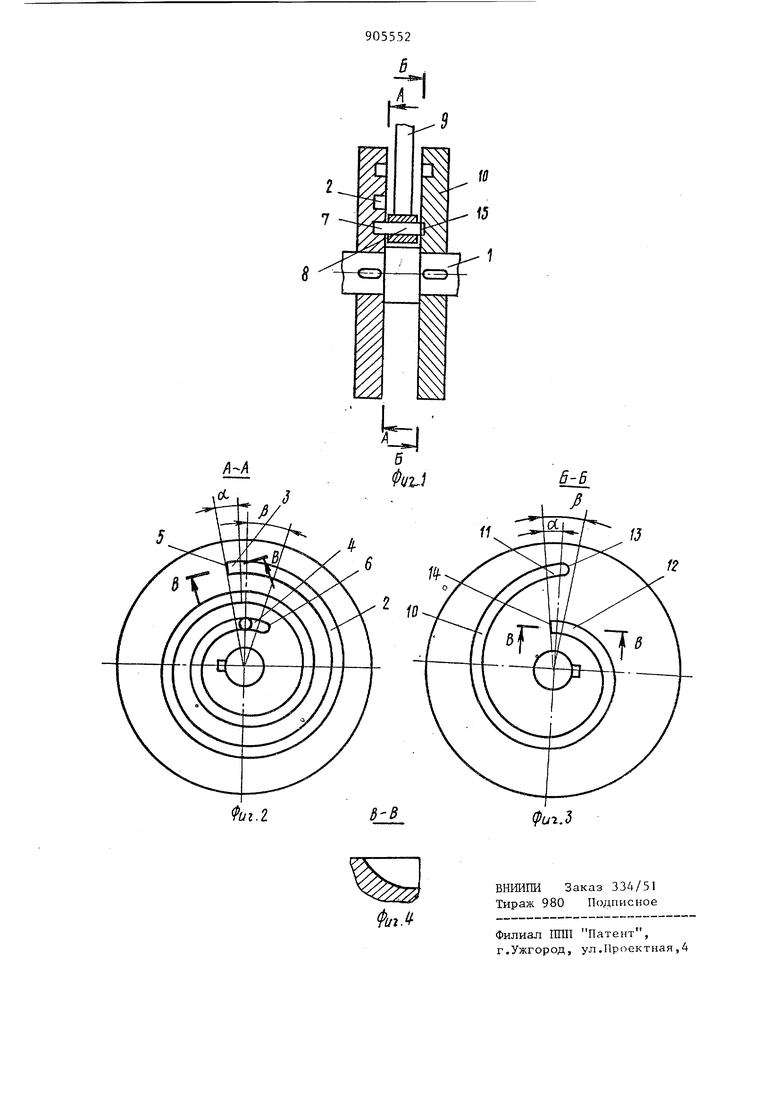
На фиг. I изображен механизм, продольный разрез, на фиг. 2 - разрез А-А на фиг. 1, на фиг. 3 - разрез Б-Б на фиг. I, на фиг. 4 - сечение В-В на фиг. 2.
Механизм содержит вал 1, жестко соединенный с ним сш1ральный пазовый кулачок 2 с круговыми участками 3 и 4 на концах 5 и 6 соответственно, глубина одного из которых, участка 3, выполнена убьшающей до нуля, взаимодействующий с кулачком 2 одним концом 7 палец 8 и ползун 9 связанный с пальцем 8.
Механизм снабжен жест1со соединенным с валом 1 вторым спиральным пазовым кулачком 10 с круговыми участками 1 и 12 на концах 13 и 14 соответственно, глубина одного из которых участка 12, расположенного на конце 14, противоположном концу 5 с убывающим по глубине участка 3 первого пазового кулачка 2, выполнена убывающей до нуля. Концы 13 и 14 спирали второго кулачка 10 расположены напротив соответствуюцдах концов 5 и б спирали первого кулачка 2, а палец 8, взаимодействующий вторым концом 15 со вторым пазовым кулачком 10, размещен в ползуйе 9 с возможностьЕо возвратно-поступательного дБюкения.
Механизм работает следующим образом.
Спираль на кулачке 2 выбрана, например Архимедовой, а на кулачке 10 убывающей, и палец 7 заведен в пзовьй кулачок 2. Вал 1, получая вращение от исполнительного органа (на чертеже не показан), вращает , оба кулачка 2 и 10. Сделав два оборота, кулачок 2 перемещает ползун У равномерно-поступательно вверх, затем на участке 3 выдвижной палец 8 переходит в пазовый спиральный 5 кулачок 10 и за один оборот ускоренно возвращается назад. Затем цикл повторится вновь, т.е. выдвижной палец 8 на участке / переходит , спиральный кулачок 2. Таким образом,
o механизм в данном конкретном случае позволяет преобразовать вращательное движение вала 1 в равномерноnocTjrnaтельное движение ползуна 9, а затем быстро вернуться назад, причем вьщвижной палец 8 находится в лучщих условиях, нежели в известном механизме и работает на срез, а не на изгиб. Использование сдвоенных спиральных пазовых кулачков с
Q различными характеристиками спиралей повьппает надежность и увеличивает функциональные возможности механизма.
5 Формула изобретения
о
Механизм для преооразования вращательного движения в возвратно-поступательное, содержащий вал, жестко соединенный с ним спиральный пазовый кулачок с Круговыми участками на концах, глубина одного из которых выполнена убывающей до нуля, взаимодействующий с кулачком одним концом палец и ползун, связанный с пальцем, отличающийс я тем, что, с целью повыщения надежности, механизм снабжен жестко соединенным с валом вторым спиральным пазовым кулачком с круговыми участками на концах, глубина одного из которых, расположенного на конце, противоположном концу с убывающим по глубине участком первого пазового кулачка, выполнена убывающей до нуля, концы спирали второго кулачка расположены напротив соответствующих концов спирали первого кулачка,а палец, взаимодействующий вторьи концом со вторым пазовым кулачком, размещен в ползуне с возможностью возвратнопостзшательного движения.
° Источники информации, принятые во внимание при экспертизе 1, Кожевников С.Н. и др. Ме ханизмы. Машиностроение f М., 1965, с. 348, рис. 4.96 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗАХВАТНОЕ УСТРОЙСТВО | 2018 |
|
RU2673118C1 |
| МЕХАНИЗМ ДЛЯ ПРЕОБРАЗОВАНИЯ РАВНОМЕРНОГО ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В НЕРАВНОМЕРНОЕ ВРАЩАТЕЛЬНОЕ | 1989 |
|
RU2022183C1 |
| Механизм гофрирования | 1989 |
|
SU1784491A1 |
| Вальцовочная головка | 1978 |
|
SU740352A1 |
| Устройство для установки клиньев в пазы якорей электрических машин | 1980 |
|
SU920969A1 |
| Станок для точки кардной гарнитуры шляпок | 1954 |
|
SU100815A1 |
| Манипулятор | 1985 |
|
SU1331638A1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2217296C1 |
| Устройство для преобразования возвратно-поступательного движения во вращательное | 1981 |
|
SU976158A1 |
| Устройство для укладки штучных предметов | 1978 |
|
SU878654A2 |