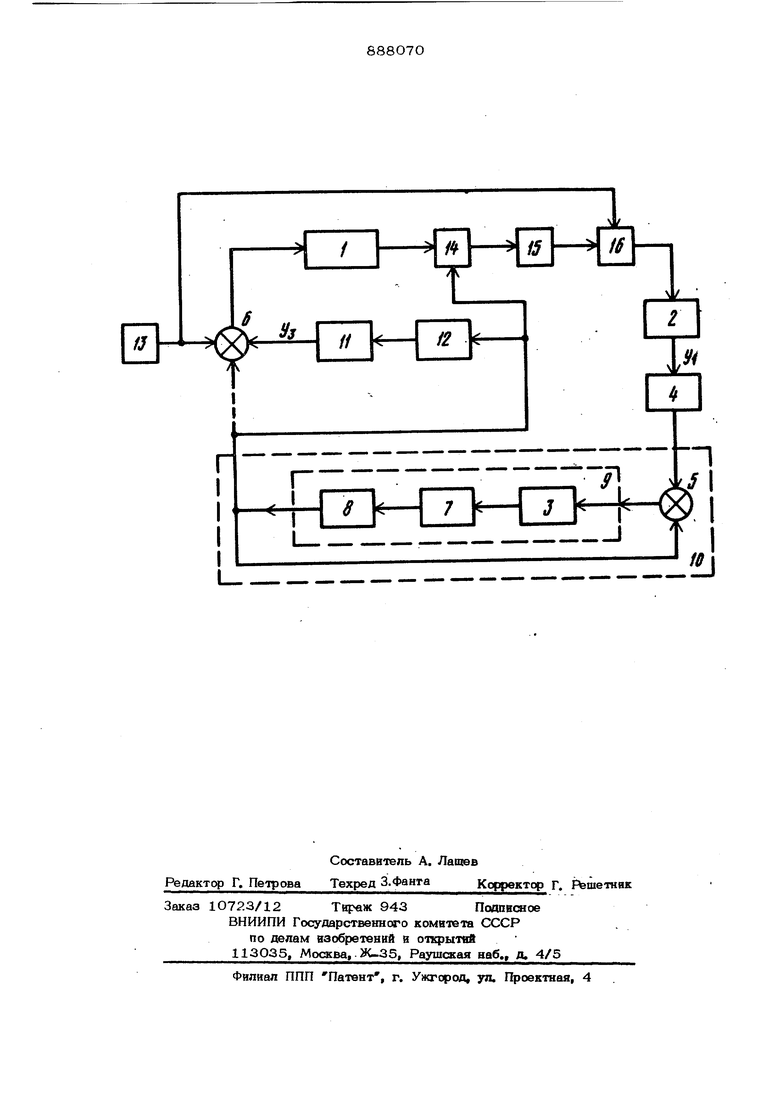
Изобретение относится к системам экстремального регулирования, может быть использована при стабилизации чаототы генерации газовых лазеров. Наиболее близким техническим решением к изобретению является система экстремального регулирсшания, содержащая последовательно соединенные первый фильтр, фазосдвигающий блок, первый сумматор и функциональный преобразователь и последовательно соединенные частотный детектор, интегратор и вторсА сумматор, выход которого соединен с входом обьекта регулирования, а выход функцво- нального преобразователя соединен с вторым входом первого сумматора. К недостаткам системы следует от нести появление фазовых сдвигов в ном сигнале объекта рех глирования, имеющего резонансы в характеристике вход, выход. Фазовые сдвиги возникают при изменении частоты поискового сигнала при работе системы и приводят к ухудшению ее помехоустойчивости. Целью изобретения являются устранение фазовых совигов в выходном сигнале объекта регул(фования, имеющего резонансы е характеристике вход-въкод, и повышение аомехоустойчивости. Поставленная цеш достигается тем, что система экстремального регулирования содержит генератор поисковых сигна лов и последовательно соединенные первъ1й преобразователь частоты, вторсЛ фильтр н вторсЛ преобразователь частоты, второй вход которого соединен с вторым входом второго сумматора и выходом генератфа поисковых сигналов, выход функционального преобразователя соединен с входом частотного детектора и nej въгм входом первого преобразователя частоты, второй вход которого соединен с вы-, ходом объекта регулирования. СтруктурвйЯ схема предлагаемой системы представлена на чертеже. Снстема содержит объект 1 регулированвя, первый фвпьгр 2, усилитель 3, фазосдвигающий блок 4, первый 5 и второй 38 в сумматоры, частотно-гадающий блок 7, ограничитель 8 амплитуды сигнала, функциональный преобразователь 9, состоящий из блоков 3, 7 и 8, генератор 10 Поискового сигнала, состоящий из блоков 5, 9, интегратор 11, i частотный детектор 12, генератор 13 поискового сигнала, первьй преобразователь 14 частоты, второй фильтр 15, второй преобразователь 16 частоты, у. - сигнал управления частотой генератора 10, у w - поио ковый сигнал, у - сигнал управления обь ектом 1, Блоки 14, 15, 16, 2, 4, 5, 9, 6, 11 12 совместно с объектом 1 образуют замкнутую цепь, при этом вторые входы преобразователя 14, сумматоров 5 и 6соединены с выходом преобразователя 9, а второй вход преобразователя 16 и третий вход сумматора 6 соединен с выходом генератора 13. Связь второго входа сумматора 6 с остальными блоками системы может отсутствовать, поскольку в процессе работы составляющая поискового сигнала у, прошедшая через объект 1, не используется для формирования сигнала управления у. Система работает следующим образом. На вход объекта 1 через сумматор 6 от генератора 13 подается дополнйтельнъй поисковый сигнале фиксированной частотой tt. Из выходного сигнала объекта 1 и поискового сигнала у2 преобразователь 14 въфабатывает сигнал, содержащий составляющие с суммарной и разностной частотами Of и ш , где W - частота поискового сигнала у . Фильтр 15 подавляет одну иэ составляющих, напри: мер с разностной частотой ,(ш - tyo)i а составляющую с суммарной частотой (ОЦ -{-Шо ) пропускает. Из полученного сигнала и дополнитель ного поискового сигнала преобразователь 16въфабатывает сигнал, составляющие которого имеют частотБт ( СУ -ьи/д)-f и ((),)-14) этого сигнала фильтр 2 въгделяет сигнал у с частотой (и) , равной частоте поискового сигнала У2. С помощью блока 4 сигнал у. сдвигается по фазе на 90. Выходной сигнал фазосдвигающего блока 4 в сумматоре 5 суммируется с поисковым сигналом У2 . Выходной сигнал сумматора 5 усиливается а усилителе 3 и подается на частот ио-аадающий блок 7. Амплитуда} выходно го сигнала блока 7 ограничивается с помощью ограничителя 8. 0 Функциональные блоки 3, 5, 7, 8 образуют генератор 1О. Частота поискового сигнала определяется блоком 7, выполненным, например в виде LC-контура, и амплитудой и фазой выходного сигнала блока 4. Въгходной сигнал сумматора 5 соответствующий сдвинутому по фазе сигналу у, , вносит либо емкостное сопротивление в LC- контур (если фаза блока 4 имеет значение -f-90), либо индуктивное сопротивление (если фаза блока 4 имеет значение -90), Это приводит к изменению частотъ генерируемого поискового сигнала у . Детектор 12 и интегратор 11 из поискового сигнала yjf вырабатъшает сигнал у , осуществляющий смещение управляемого параметра по направлению к экстремуму. Введение НОВЪЕХ функциональнък бло ков и надлежащий въйор значения частоты дополнительного поискового сигнала позволяют исключить фазовые сдвиги в выходном сигнале объектов регулирования с резонансами в характеристике вход-въкод. Формула изобретения Система экстремального регулирования, содержащая последовательно соединеннъю первый фильтр, фазосдвигающий блок, первъй сумматор и функциональный преобразователь и последовательно соединенные частотнъй детектор, интегратор и второй сумматор, выход которого соединен с входом объекта регулирования, въгход функционального преобразователя соединен с вторым входом первого сумматора, отличающаяся тем, что, с целью повыщёния помехоустойчивости системы, она содержит генератор поисковых сигналов и последовательно соединенные первый преобразователь чаототы, второй фильтр и второй преобразователь частоты, второй.вход которого соединен с вторъхм входом второго .сумматора и въгходом генератора поисковъгх сигналов, въ1ход функционального преобразователя соединен с входом частотного детектора и первым входом первого преобразователя частоты, второй вход которого соединен с выходом объекта регулирования. Источники информации, принятые во внимание при экспертизе 1, Авторское свидетельство СССР № 661504, кл, G05 В 13/О2, 1978 (прототип)
| название | год | авторы | номер документа |
|---|---|---|---|
| Система экстремального регулирования | 1980 |
|
SU888069A1 |
| Система экстремального регулирования | 1974 |
|
SU661504A1 |
| Многоканальная система экстремальногоРЕгулиРОВАНия | 1979 |
|
SU824141A1 |
| Многоканальная система экстремального регулирования | 1974 |
|
SU528544A1 |
| Многоканальная система экстремального регулирования | 1981 |
|
SU1187147A1 |
| Устройство для автоматической настройки катушки индуктивности с подмагничиванием | 1978 |
|
SU771795A1 |
| Устройство для управления экстремальным объектом с неустойчивой линейной частью | 1980 |
|
SU901995A1 |
| Двухмерная электромеханическая экстремальная система | 1975 |
|
SU565284A1 |
| Система экстремального управления | 1980 |
|
SU894672A1 |
| Система управления инерционным экстремальным объектом | 1986 |
|
SU1456930A1 |